传感器作业
- 格式:doc
- 大小:36.00 KB
- 文档页数:4

1、如何改善单组式变极距型电容传感器的非线性?答:对于变极距单组式电容器由于存在着原理上的非线性,所以在实际应用中必须要改善其非线性。
改善其非线性可以采用两种方法。
(1)使变极距电容传感器工作在一个较小的范围内(0.01μm至零点几毫米),而且最大△δ应小于极板间距δ的1/5—1/10。
(2)采用差动式,理论分析表明,差动式电容传感器的非线性得到很大改善,灵敏度也提高一倍。
2、单组式变面积型平板形线位移电容传感器,两极板相对覆盖部分的宽度为4mm,两极板的间隙为0.5mm,极板间介质为空气,试求其静态灵敏度?若两极板相对移动2mm,求其电容变化量。
已知:b=4mm,δ=0.5mm,ε0=8.85×10-12F/m 求:(1)k=?;(2)若△a=2mm时△C=?。
6、画出电容式加速度传感器的结构示意图,并说明其工作原理。
答:电容式加速度传感器的结构示意图为:其中:1、5为两个固定极板;2为壳体;3为支撑弹簧片;4质量块;A面和B面为固定在质量块上的电容器的极板。
当测量垂直方向上直线加速度时,传感器的壳体2固定在被测振动体上,振动体的振动使壳体相对质量块运动,因而与壳体固定在一起的两固定极板1、5相对质量块4运动,致使上固定极板5与质量块4的A面组成的电容器Cx1以及下固定极板与质量块4的B面组成的电容器Cx2随之改变,一个增大,一个减小,它们的差值正比于被测加速度,而实现测量加速度的目的。
1、某霍尔元件l 、b 、d 尺寸分别为1.0cm ×0.35cm ×0.1cm ,沿l 方向通以电流I =1.0mA ,在垂直于lb 面方向加有均匀磁场B=0.3T ,传感器的灵敏度系数为22V/A ·T ,试求其输出霍尔电动势及载流子浓度。
已知:l ×b ×d=1.0cm ×0.35cm ×0.1cm ;I =1.0mA ;B=0.3T ;k H =22V/A ·T ;求:U H =?;n=?解:如图IB IB V IB k U H H 33106.63.0100.122--⨯=⨯⨯⨯==2、试说明霍尔式位移传感器的输出U H 与位移x 成正比关系。

一、选择题1、回程误差表明的是在()期间输出——输入特性曲线不重合的程度。
( D )A、多次测量B、同次测量C、不同测量D、正反行程2、传感器的下列指标全部属于静态特性的是()( C )A、线性度、灵敏度、阻尼系数B、幅频特性、相频特性、稳态误差C、迟滞、重复性、漂移D、精度、时间常数、重复性3、()是采用真空蒸发或真空沉积等方法,将电阻材料在基底上制成一层各种形式敏感栅而形成应变片。
这种应变片灵敏系数高,易实现工业化生产,是一种很有前途的新型应变片。
( D )A、箔式应变片B、半导体应变片C、沉积膜应变片D、薄膜应变片4、利用相邻双臂桥检测的应变式传感器,为使其灵敏度高、非线性误差小()。
( C )A、两个桥臂都应当用大电阻值工作应变片B、两个桥臂都应当用两个工作应变片串联C、两个桥臂应当分别用应变量变化相反的工作应变片D、两个桥臂应当分别用应变量变化相同的工作应变片5、金属丝的电阻随着它所受的机械变形(拉伸或压缩)的大小而发生相应的变化的现象称为金属的()。
( B )A、电阻形变效应B、电阻应变效应C、压电效应D、压阻效应6、下列说法正确的是()。
( D )A、差动整流电路可以消除零点残余电压,但不能判断衔铁的位置。
B、差动整流电路可以判断衔铁的位置,但不能判断运动的方向。
C、相敏检波电路可以判断位移的大小,但不能判断位移的方向。
D、相敏检波电路可以判断位移的大小,也可以判断位移的方向。
7、随着人们对各项产品技术含量的要求的不断提高,传感器也朝向智能化方面发展,其中,典型的传感器智能化结构模式是()。
( B )A、传感器+通信技术B、传感器+微处理器C、传感器+多媒体技术D、传感器+计算机二、判断题线性测量系统的灵敏度是时间的线性函数。
( F )涡流传感器一般不能用来测量钢板厚度。
( F )电感式传感器根据结构形式可分为自感式和互感式两种。
( F )光生伏特效应属于内光电效应的一种。
( T )引用误差反映了一个检测装置的综合性能指标,用来作为检测仪表的分类标准。

《用传感器测磁感应强度》作业设计方案一、作业目标1、让学生了解磁感应强度的概念和物理意义。
2、掌握使用传感器测量磁感应强度的基本原理和方法。
3、培养学生的实验操作能力、数据分析能力和解决问题的能力。
4、激发学生对物理实验的兴趣,提高学生的科学素养。
二、作业内容1、理论知识预习(1)布置学生预习磁感应强度的相关知识,包括定义、单位、公式等。
(2)让学生了解常见的磁场产生方式,如永磁体、通电直导线、通电螺线管等。
2、实验准备(1)准备实验器材,如霍尔传感器、数据采集器、计算机、永磁体、通电螺线管、电源等。
(2)向学生介绍实验器材的使用方法和注意事项。
3、实验操作(1)测量永磁体周围的磁感应强度将霍尔传感器放置在永磁体周围的不同位置,记录数据采集器上显示的磁感应强度值。
改变传感器与永磁体的距离,观察磁感应强度的变化。
(2)测量通电直导线周围的磁感应强度连接好电路,使通电直导线通过一定大小的电流。
将霍尔传感器沿着直导线的垂直方向移动,测量不同位置的磁感应强度。
(3)测量通电螺线管内部的磁感应强度将霍尔传感器插入通电螺线管内部的不同位置,测量磁感应强度。
改变电流大小,观察磁感应强度的变化。
4、数据处理与分析(1)学生将实验中测量的数据记录在表格中。
(2)根据数据绘制磁感应强度与位置的关系曲线。
(3)分析实验数据,讨论磁感应强度的分布规律。
5、问题思考与讨论(1)比较不同实验条件下测量得到的磁感应强度,分析影响磁感应强度大小的因素。
(2)思考霍尔传感器测量磁感应强度的误差来源,并提出减小误差的方法。
(3)探讨如何利用所学知识,设计一个更精确的磁感应强度测量方案。
三、作业要求1、学生在实验过程中要认真操作,如实记录数据。
2、实验完成后,及时整理实验器材,保持实验室整洁。
3、独立完成实验报告,包括实验目的、实验步骤、实验数据、数据分析和结论等内容。
4、在讨论环节中,积极参与,发表自己的观点和看法。
四、作业评价1、实验操作评价(1)观察学生在实验中的操作是否规范、熟练。

《传感器的应用》作业设计方案一、设计背景:传感器是一种能够感知环境中各种物理量并将其转换为电信号的设备,广泛应用于工业、农业、医疗等领域。
本次作业旨在让学生了解传感器的基本原理和应用,并通过实际操作加深对传感器的理解。
二、设计目标:1. 了解传感器的基本原理和分类;2. 掌握传感器在不同领域的应用;3. 能够设计简单的传感器应用实验。
三、设计内容:1. 进修任务:(1)阅读相关教材或资料,了解传感器的基本原理和分类;(2)查阅资料,了解传感器在工业、农业、医疗等领域的应用。
2. 实践任务:(1)设计一个简单的传感器应用实验,如温度传感器检测环境温度;(2)记录实验过程和结果,撰写实验报告。
四、设计步骤:1. 进修任务:(1)预习阶段:学生自主阅读相关资料,了解传感器的基本原理和分类;(2)教室授课:教师讲解传感器的基本原理和应用,引导学生思考传感器在实际生活中的应用途景。
2. 实践任务:(1)实验准备:学生准备实验所需材料,如温度传感器、Arduino开发板等;(2)实验操作:学生根据设计的实验方案,进行实验操作并记录数据;(3)实验分析:学生分析实验结果,总结实验过程中的问题和经验教训;(4)实验报告:学生撰写实验报告,包括实验目标、方法、结果和结论。
五、评判方式:1. 进修任务评判:考察学生对传感器基本原理和分类的理解水平;2. 实践任务评判:考察学生设计实验的能力和实验操作的准确性;3. 实验报告评判:考察学生实验报告的完备性和逻辑性。
六、作业要求:1. 按时完成进修任务和实践任务;2. 实验报告格式规范,内容完备。
七、参考资料:1. 《传感器技术与应用》2. 《Arduino入门教程》以上为《传感器的应用》作业设计方案,希望学生能够通过本次作业深入了解传感器的应用,提高实践能力和动手能力。
祝学生们顺利完成作业!。

《认识传感器》作业设计方案一、课程背景传感器是一种能够感知并转化物理量或化学量为电信号的装置。
在摩登科技领域中,传感器扮演着至关重要的角色,广泛应用于各种领域,如工业控制、环境监测、医疗仪器等。
本课程旨在让学生了解传感器的基本原理、分类、工作原理以及应用领域,培养学生对传感器的认识和兴趣。
二、教学目标1. 了解传感器的定义、分类和工作原理;2. 掌握传感器的常见应用领域;3. 能够设计简单的传感器应用实验;4. 培养学生的创新能力和动手能力。
三、教学内容1. 传感器的定义和分类;2. 传感器的工作原理;3. 传感器的应用领域;4. 传感器实验设计。
四、教学方法1. 理论讲解结合实例分析;2. 实验操作演示;3. 小组讨论和展示。
五、作业设计方案1. 作业一:传感器调查报告要求学生选择一个特定的传感器(如温度传感器、湿度传感器等),调查其原理、工作方式、应用领域以及市场需求。
撰写一份调查报告,并进行口头汇报。
2. 作业二:传感器应用设计学生根据实际需求,设计一个简单的传感器应用方案,包括传感器类型选择、工作原理、数据采集和处理方法等。
制作应用方案的演示文稿,并进行小组展示。
3. 作业三:传感器实验设计学生根据所学知识,设计一个简单的传感器实验,包括实验材料准备、实验步骤、数据采集和分析等内容。
完成实验报告,并进行实验结果展示。
六、评判方式1. 作业一:传感器调查报告,分析深度、表达清晰、结构合理;2. 作业二:传感器应用设计,创新性、实用性、演示效果;3. 作业三:传感器实验设计,实验设计合理、数据准确、结论明晰。
七、参考资料1. 《传感器技术与应用》2. 《传感器原理与应用》3. 《传感器与检测技术》以上是《认识传感器》作业设计方案的详细内容,希望能够帮助学生更好地了解传感器的相关知识,培养学生的实践能力和创新思维。
愿学生在本课程中取得优异的成绩,为未来的发展打下坚实的基础。
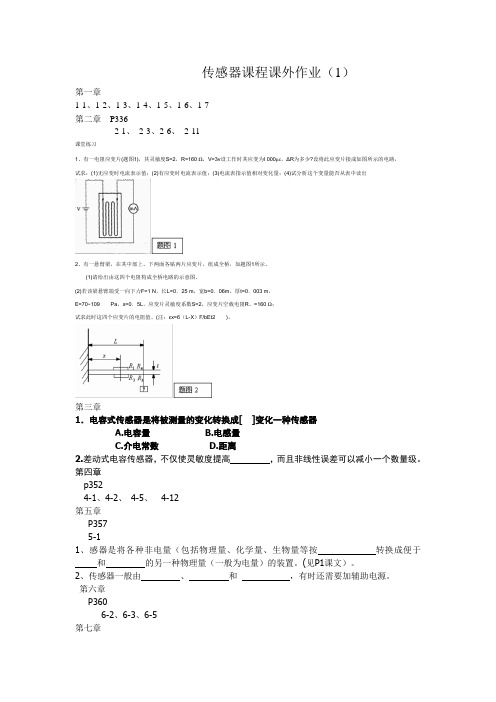
传感器课程课外作业(1)第一章1-1、1-2、1-3、1-4、1-5、1-6、1-7第二章P3362-1、2-3、2-6、2-11课堂练习1、有一电阻应变片(题图1),其灵敏度S=2,R=160 Ω,V=3v设工作时其应变为l 000με,ΔR为多少?设将此应变片接成如图所示的电路,试求:(1)无应变时电流表示值;(2)有应变时电流表示值;(3)电流表指示值相对变化量;(4)试分析这个变量能否从表中读出2、有一悬臂梁,在其中部上、下两面各贴两片应变片,组成全桥,如题图1所示。
(1)请给出由这四个电阻构成全桥电路的示意图。
(2)若该梁悬臂端受一向下力F=1 N,长L=0.25 m,宽b=0.06m,厚t=0.003 m,E=70×109Pa,x=0.5L,应变片灵敏度系数S=2,应变片空载电阻R。
=160 Ω;试求此时这四个应变片的电阻值。
(注:εx=6(L-X)F/bEt2)。
第三章1.电容式传感器是将被测量的变化转换成[]变化一种传感器A.电容量B.电感量C.介电常数D.距离2.差动式电容传感器,不仅使灵敏度提高,而且非线性误差可以减小一个数量级。
第四章p3524-1、4-2、4-5、4-12第五章P3575-11、感器是将各种非电量(包括物理量、化学量、生物量等按转换成便于和的另一种物理量(一般为电量)的装置。
(见P1课文)。
2、传感器一般由、和,有时还需要加辅助电源。
第六章P3606-2、6-3、6-5第七章P3637-2、7-9、7-10第8章P3678-1、8-71、磁敏传感器有、、、、。
2、常用的光电器件有、、、、。
3、光敏电阻的性能好、灵敏度高,是指定给工作电压下()。
A.暗电阻大B.亮电阻大C.暗电阻与亮电阻的差值大D.暗电阻与亮电阻的差值小4、CCD图像传感器是利用CCD的光学转移和电荷转移的双重功能,从而将照射在CCD上的光学图像转移成了电信号“图像”。
《简易机器人常用传感器》作业设计方案第一课时一、设计背景:随着科技的不息进步,机器人技术已经逐渐走进人们的平时生活。
而机器人的核心功能之一就是能够感知四周环境,并依据环境的变化做出相应的反应。
因此,传感器作为机器人的“感觉器官”,在机器人设计中起着至关重要的作用。
本次作业旨在让同砚了解并精通常用的机器人传感器,并利用这些传感器设计一个简易机器人。
二、设计目标:1. 了解机器人传感器的种类和作用;2. 精通传感器与控制系统之间的协作原理;3. 进行实际操作,设计一个具有基本感知能力的简易机器人。
三、设计内容:1. 机器人传感器介绍:本次设计将涉及到以下常用机器人传感器:- 光敏传感器:用于检测光线强度,实现机器人对光线的感知;- 超声波传感器:用于测量距离,实现机器人对四周环境的距离感知;- 红外传感器:用于检测物体的距离和避障,实现机器人在前进过程中的避障功能;- 陀螺仪传感器:用于检测机器人的角度和方向变化,实现机器人的姿态控制。
2. 传感器与控制系统协作原理:传感器卖力感知四周环境,并将感知到的数据传递给控制系统,控制系统依据接收到的数据做出相应的决策和控制机器人的挪动。
这种协作原理是实现机器人智能感知和自主运动的关键。
3. 简易机器人设计:基于上述传感器和控制系统的协作原理,设计一个简易机器人,要求具有以下功能:- 能够感知光线强度,并依据光线强度的变化调整自身运动方向;- 能够测量前方距离并避障;- 能够保持水平姿态并依据陀螺仪传感器调整角度。
四、设计步骤:1. 硬件部分:- 搭建机器人底盘,安装电机和轮子;- 毗连光敏传感器、超声波传感器、红外传感器和陀螺仪传感器;- 搭建控制系统,包括单片机和电机驱动模块。
2. 软件部分:- 编写传感器数据得到程序,并将数据传递给控制系统;- 编写控制系统程序,依据传感器数据调整机器人的运动和姿态。
3. 测试部分:- 对机器人进行光线强度、距离、避障和姿态稳定性的测试;- 调整程序,优化机器人的运动和姿态控制。
《传感器的应用》作业设计方案一、作业目标1、让学生了解传感器的基本原理和类型。
2、帮助学生认识传感器在日常生活、工业生产、科学研究等领域的广泛应用。
3、培养学生观察和分析实际问题中传感器应用的能力。
4、激发学生对传感器技术的兴趣,鼓励学生探索创新应用。
二、作业内容(一)知识回顾1、要求学生回顾传感器的定义、工作原理和常见类型,如温度传感器、压力传感器、光电传感器等。
2、让学生简述传感器将物理量转换为电信号的过程。
(二)实际应用案例分析1、家庭生活中的传感器分析智能电饭煲中温度传感器的作用,如何实现精确控温,保证米饭的口感。
探讨烟雾报警器中烟雾传感器的工作原理,以及如何及时发出警报保障家庭安全。
2、工业生产中的传感器研究汽车生产线上压力传感器在零部件检测中的应用,如何确保产品质量。
了解自动化工厂中光电传感器在物料传输和设备控制中的作用。
3、医疗领域的传感器探究血糖仪中生物传感器的工作机制,如何快速准确测量血糖水平。
分析心电图机中电极传感器如何捕捉心脏电活动,辅助诊断心脏疾病。
4、环境监测中的传感器研究空气质量监测站中气体传感器对有害气体的检测,如何为环境保护提供数据支持。
了解水质监测设备中传感器如何测量水质参数,如 pH 值、溶解氧等。
(三)创新应用设想1、鼓励学生思考传感器在未来智能家居中的创新应用,如智能窗户根据光照自动调节透明度。
2、让学生设想传感器在智能交通领域的新应用,如道路状况实时监测系统。
(四)数据收集与分析1、学生选择一个感兴趣的传感器应用场景,收集相关数据,如传感器的性能参数、应用效果等。
2、对收集的数据进行分析,总结传感器在该场景中的优势和不足。
三、作业形式1、书面报告学生以书面形式完成案例分析和创新应用设想,要求逻辑清晰、表述准确。
2、小组讨论组织学生进行小组讨论,分享各自收集的数据和分析结果,互相交流和学习。
3、实物展示(可选)有条件的情况下,鼓励学生制作简单的传感器应用模型或实物,进行展示和讲解。
一、选择题1、回程误差表明的是在()期间输出——输入特性曲线不重合的程度。
( D )A、多次测量B、同次测量C、不同测量D、正反行程2、传感器的下列指标全部属于静态特性的是() ( C )A、线性度、灵敏度、阻尼系数B、幅频特性、相频特性、稳态误差C、迟滞、重复性、漂移D、精度、时间常数、重复性3、()是采用真空蒸发或真空沉积等方法,将电阻材料在基底上制成一层各种形式敏感栅而形成应变片。
这种应变片灵敏系数高,易实现工业化生产,是一种很有前途的新型应变片。
( D )A、箔式应变片B、半导体应变片C、沉积膜应变片D、薄膜应变片4、利用相邻双臂桥检测的应变式传感器,为使其灵敏度高、非线性误差小()。
( C )A、两个桥臂都应当用大电阻值工作应变片B、两个桥臂都应当用两个工作应变片串联C、两个桥臂应当分别用应变量变化相反的工作应变片D、两个桥臂应当分别用应变量变化相同的工作应变片5、金属丝的电阻随着它所受的机械变形(拉伸或压缩)的大小而发生相应的变化的现象称为金属的()。
( B )A、电阻形变效应B、电阻应变效应C、压电效应D、压阻效应6、下列说法正确的是()。
( D )A、差动整流电路可以消除零点残余电压,但不能判断衔铁的位置。
B、差动整流电路可以判断衔铁的位置,但不能判断运动的方向。
C、相敏检波电路可以判断位移的大小,但不能判断位移的方向。
D、相敏检波电路可以判断位移的大小,也可以判断位移的方向。
7、随着人们对各项产品技术含量的要求的不断提高,传感器也朝向智能化方面发展,其中,典型的传感器智能化结构模式是()。
( B )A、传感器+通信技术B、传感器+微处理器C、传感器+多媒体技术D、传感器+计算机二、判断题线性测量系统的灵敏度是时间的线性函数。
( F )涡流传感器一般不能用来测量钢板厚度。
( F )电感式传感器根据结构形式可分为自感式和互感式两种。
( F )光生伏特效应属于内光电效应的一种。
第一章1-1 什么是测量值的绝对误差、相对误差、引用误差答:绝对误差是指测量值与真值的差,绝对误差是有正、负并有量纲的,即x L ∆=-相对误差分为:实际相对误差和标称相对误差:实际相对误差是指:绝对误差在真值中所占的百分比,即100%Lδ∆=⨯, 由于真值L 往往无法知道,相对误差常用标称相对误差。
标称相对误差是指:绝对误差在实际测量值中所占的百分比,即100%xδ∆=⨯。
引用误差是指:绝对误差在仪表满量程中所占的百分比,即100%γ∆=⨯-测量范围上限测量范围下线Δ——绝对误差;x ——测量值; L ——真值。
1-2 用测量范围为-50~150kPa 的压力传感器测量140kPa 压力时,传感器测得示值为142kPa ,求该示值的绝对误差、实际相对误差、标称相对误差和引用误差。
解:绝对误差 :x L ∆=-()1421402kPa =-= 实际相对误差:2100%100% 1.43%140L δ∆=⨯=⨯≈ 标称相对误差:2100%100% 1.41%142x δ∆=⨯=⨯≈引用误差:2100%100%1%15050γ∆=⨯=⨯=-+测量范围上限测量范围下线1-3 什么是系统误差系统误差可分为哪几类系统误差有哪些检验方法如何减小和消除系统误差答:在同一测量条件下,多次测量被测量时,绝对值和符号保持不变,或在条件改变时,按一定规律(如线性、多项式、周期性等函数规律)变化的误差称为系统误差。
分两种:前者为恒值系统误差,后者为变值系统误差。
系统误差的检验方法:1.实验对比法2.残余误差观察法3.准则检测法系统误差的减小和消除:1.在测量结果中进行修正2.消除系统误差的根源3.在测量系统中采用补偿措施4.实时反馈修正第二章2-1 什么叫传感器它有哪几部分组成它们的作用及相互关系如何1、传感器是一种以一定的精确度把被测量转换为与之确定对应关系的、便于应用的某种物理量的测量装置。
2、传感器由敏感元件、转换元件和辅助部件组成。