基于线性协方差分析法的轨道机动精度分析
- 格式:pdf
- 大小:249.29 KB
- 文档页数:5


基于STK的GNSS系统的定位精度分析刘周巍【摘要】利用STK对GNSS系统当中的GPS、GLONASS、BDS系统构建仿真星座模型,比较GPS、GLONASS、BDS系统的可见卫星数和DOP值.对三个系统进行系统间混合组合形成新的系统,组合系统有GPS/GLONASS、GPS/BDS、BDS/GLONASS和BDS/GPS/GLONASS,对组合系统进行仿真实验比较分析不同截止高度角下的可见卫星数变化和DOP值.对不同系统的区域定位性能进行了研究,研究结果表明了在GNSS系统不同组合系统的定位精度中,GPS/BDS/GLONASS 的组合精度最高,GPS/BDS的组合是双系统中定位精度最优的,而单系统中BDS是定位精度最优的.【期刊名称】《软件》【年(卷),期】2018(039)008【总页数】6页(P104-109)【关键词】GNSS;精度因子(DOP);STK;多星座;仿真实验【作者】刘周巍【作者单位】昆明理工大学国土资源工程学院,云南昆明 650093【正文语种】中文【中图分类】TP391.9全球卫星导航定位系统主要包括GPS、GLONASS、GALILLEO和BDS,在本文中主要研究了GPS、GLONASS、BDS和组合系统。
对导航星座而言,系统提供的定位几何是影响导航精度的一个重要因素。
一般导航系统的定位几何可以用精度衰减因子DOP(Dilution of precision)来描述,定义为用户等效距离误差UERE(User Equivalent Range Error)到最终定位误差或定时误差的放大系数,它反映了观测源几何位置对定位误差的影响[1]。
在卫星导航系统中,精度衰减因子DOP中的几何精度因子GDOP对接收机精度有很大影响。
为了评估定位精度,通常需要计算导航系统的GDOP值[2]。
在本文中,利用STK建立GPS、GLONASS、BDS和组合系统的空间卫星星座模型,对精度衰减因子(DOP,Dilution of precision)中的几何精度衰减因子(GDOP,Geometry Dilution of precision)进行研究分析,进而分析不同条件下的GPS、GLONASS、BDS、GPS/GLONASS、GPS/BDS、BDS/GLONASS和GPS/BDS/GLONASS的定位精度。

基于动力学轨道拟合的LEO卫星轨道预报精度分析王友存;郭金运;夏要伟;孔巧丽【摘要】轨道预报是地球探测卫星顺利执行科学任务的一个重要环节.为了实现对低轨卫星长弧段、高精度的轨道预报,文中运用动力学轨道拟合的方法进行轨道预报.选用GRACE-A卫星、HY-2A卫星和JASON-2卫星为例进行预报处理,分析了卫星的轨道高度和拟合弧长对轨道预报结果的影响.结果表明,GRACE-A卫星预报4h和8h轨道的3D RMS分别优于3 m和10 m,HY-2A卫星和JASON-2预报4h轨道的3D RMS分别优于2 dm和1 dm,24 h轨道预报结果3D RMS分别优于2.5m和2 m.【期刊名称】《全球定位系统》【年(卷),期】2018(043)004【总页数】8页(P59-66)【关键词】低轨卫星;轨道预报;动力学拟合【作者】王友存;郭金运;夏要伟;孔巧丽【作者单位】山东科技大学测绘科学与工程学院,山东青岛266590;山东科技大学测绘科学与工程学院,山东青岛266590;山东科技大学测绘科学与工程学院,山东青岛266590;山东科技大学测绘科学与工程学院,山东青岛266590【正文语种】中文【中图分类】P228.40 引言低轨卫星在完成对地观测计划、数据上下行计划、轨道维持、机动计划及激光测距等方面的科学任务时,对于卫星轨道预报有一定的精度要求[1-2]。
考虑到低轨卫星星载设备的不稳定性,会出现短时间的信号失锁,通过对卫星的轨道进行预报,实现了数据中断处的有效连接[2]。
同时在卫星的自主导航系统中需要实时对卫星轨道进行预报[1-2]。
此外,基于低轨卫星的星间链路增强技术是导航卫星系统常用的技术手段[3],当低轨卫星作为星基监测站时,卫星需要进行轨道预报来完成“广播星历”的发布[3-4]。
因此低轨卫星的轨道预报是卫星任务顺利执行的基本要求。
目前针对低轨卫星的轨道预报主要方法有:基于多项式拟合的方法,通过一组先验的卫星轨道信息完成对多项式系数的求解[5-6],再利用完整的多项式对卫星轨道进行预报[6]。
一个机动目标跟踪数据分析系统的实现郭庆平,杜俊吟,章必雄武汉理工大学计算机科学与技术学院,湖北武汉(430063)Email:ducat2003@摘 要:本文提出了一种机动跟踪数据分析系统具体实现方案。
系统首先对雷达采集的数据进行预处理,随后使用内插外推法将各雷达采集的数据时间对准,然后通过航迹关联滤波完成航迹的关联,最后使用扩展卡尔曼滤波。
仿真实验结果表明,在扩展卡尔曼滤波算法的基础上,增加基于“当前”统计模型的自适应滤波算法对加速度方差公式进行修正,可以很好的解决融合结果发散的问题,提高数据融合的精度。
关键词:机动目标跟踪,卡尔曼滤波,数据融合1.引言在现代战争中,目标可分为机动目标(作非匀速直线运动或非匀加速直线运动的目标)和非机动目标(作匀速直线运动或匀加速直线运动的目标),而对目标进行观测的传感器主要是雷达、红外、声纳等。
机动目标的速度、加速度、位置等状态量变化快,使其难于跟踪。
由于现代战争对传感器测量结果的精度要求越来越高,提高单个传感器精度会使其成本剧增,所以通常会把多个传感器在空间和时间上的信息依照某种准则进行组合、相关,以获得对被测对象的一致性解释或描述,使该系统性能远远高于由它各组成的部分子集所单独构成的系统。
综合多个传感器的量测数据需经过一个复杂的数据分析过程,而本文提出的机动目标跟踪数据分析系统就是这一复杂数据分析过程的一个整体解决方案[1]。
本文所提出的数据分析系统使用两台雷达作为主探测器,并辅以红外探测器提供的目标方位信息。
红外探测器所具有隐蔽性好和抗干扰能力强等优点,使其成为雷达的一种很好的补充[2]。
在对两台雷达数据进行融合时,采用了扩展卡尔曼滤波算法。
扩展的卡尔曼滤波在目标加速度模型不准的情况下,数据融合的结果容易发散。
为解决这一问题,本系统参考周宏仁提出的基于“当前”统计模型的自适应滤波算法中的一个对加速度方差的修正公式,很好的解决融合结果发散的问题[3]。
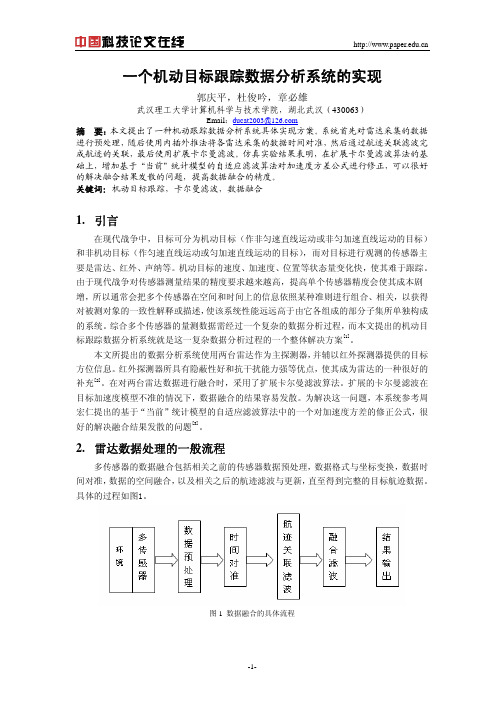
2.雷达数据处理的一般流程多传感器的数据融合包括相关之前的传感器数据预处理,数据格式与坐标变换,数据时间对准,数据的空间融合,以及相关之后的航迹滤波与更新,直至得到完整的目标航迹数据。
基于方位线性预测的远距离目标机动检测方法潘新祥;刘凯【摘要】随着水下声探测的范围成倍增大,纯方位目标定位与跟踪技术面临严峻的挑战,特别是在对抗条件下的目标机动检测与跟踪问题难度更大.针对基于拖曳线列阵声纳探测的远距离目标机动检测问题,通过对以往纯方位目标机动检测方法的适用性分析,结合远距离目标方位变化的特点,提出了基于方位序列线性预测的累积和机动检测模型.实验室仿真验证结果表明,算法对幅度稍大的目标转向机动,具有较灵敏的机动检测效果及较强的鲁棒性.因此,该检测方法解决了远距离、大误差、纯方位量测条件下的目标机动检测问题.%According to the application of towed linear array, the acoustic detecting range is becoming larger. So the technology of bearings-only TMA is faced with a severer challenge, especially the problem of target' s maneuver detecting is more difficult. As for the problem of large range target' s maneuver detecting, after analyzing the former algorithms of target' s maneuver detecting, and thinking of the behaviour of large range target' s bearings, a CUSUM maneuver detecting model under fiting and forecasting for the sequence of bearings is proposed. The new method can solve the problem of bearings-only maneuver detecting on large range and error level. Simulation results prove the efficiency of the proposed method.【期刊名称】《指挥控制与仿真》【年(卷),期】2013(035)002【总页数】5页(P113-117)【关键词】纯方位;远距离;目标机动检测【作者】潘新祥;刘凯【作者单位】中国船舶重工集团公司第七一六研究所,江苏连云港222061【正文语种】中文【中图分类】E911随着拖曳线列阵声纳在水下探测系统中的应用,水下作战平台的声探测范围成倍增大,甚至达到100km以上。
空间碎片碰撞预警的误差分析方法研究*【摘要】随着空间碎片的日益增多,空间碎片碰撞预警越来越重要,为了提高碰撞预警的精度,基于碰撞概率的空间碎片碰撞预警需要准确的轨道误差协方差信息。
通过对国内外文献的阅读与研究,从工程角度出发,对空间碎片碰撞预警主要的误差分析方法进行了全面的介绍。
分析了空间碎片碰撞预警的误差分析所涉及的理论方法,总结了主要方法的发展动态,指出了各误差分析方法待解决的问题,给出了方法的改善思路,为今后的空间碎片碰撞预警提供参考。
【关键词】轨道误差碰撞预警空间碎片随着在轨空间碎片日益增加,空间碎片对航天器、航天任务和空间环境都构成了严重威胁,因此,空间碎片碰撞预警变得越发重要,而误差分析就是碰撞预警所涉及的重要技术。
对于直径10cm以上的空间碎片,为使航天器进行有效的机动规避,基于碰撞概率的空间碎片碰撞预警方法被提出。
在空间碎片碰撞预警中,轨道预报误差协方差数据是计算碰撞概率时必要的参数和影响碰撞预警精度的重要因素。
怎样使误差分析得到的预报误差协方差结果更加准确是当前误差分析研究中需要解决的问题。
通过误差来源和轨道确定精度的内、外符合形式[1]以及国内外对轨道预报误差分析的研究,从工程角度出发,将误差分析方法分为:基于轨道模型的误差外推法、以及基于历史TLE的误差预报函数拟合两类方法。
本文将对空间碎片碰撞预警主要的两类误差分析方法的相关理论、研究现状进行介绍,并提出方法的改进思路。
1 基于轨道模型的误差外推方法利用观测设备可得到空间目标较精确的观测数据,该方法是利用精度较高的观测数据通过轨道确定获得初始的轨道数据以及初始状态误差协方差矩阵,通过状态转移矩阵将初始协方差矩阵进行外推,获得协方差随时间的变化规律。
状态转移矩阵的定义为某时刻的状态矢量随初始状态矢量变化的状态改变[7],由轨道预报模型决定。
由于轨道动力学模型是非线性的,所以状态转移矩阵很难通过解析方法求解。
可以运用协方差分析描述函数法(CADET)来解决,它是一种将非线性系统线性化的误差分析方法[8],具有计算时间少,精度高的特点。
基于多项式预测滤波的机动目标轨迹获取
孙双;刘清
【期刊名称】《南京师范大学学报(工程技术版)》
【年(卷),期】2009(009)004
【摘要】目标的轨迹反应了目标的运行位置,如果能够提前一步得到目标的运行位置,就能提前采取必要的措施,然而目标的轨迹预测受到各种因素影响难于准确的计算.提出了一种基于多项式预测滤波的机动目标轨迹预测方法(MPF),该方法利用目标的前k步位置,分别从直线、斜线、曲线3个方面预测目标运动的下一个轨迹位置.仿真实验验证,此方法较其他轨迹预测方法具有较高的准确性.
【总页数】4页(P12-15)
【作者】孙双;刘清
【作者单位】南京师范大学,计算机科学与技术学院,江苏,南京,210048;南京师范大学,计算机科学与技术学院,江苏,南京,210048
【正文语种】中文
【中图分类】TP872
【相关文献】
1.基于小波变换的ARPA目标机动识别及轨迹预测 [J], 熊雷
2.基于测角信息的机动目标轨迹预测研究 [J], 陈海霞;赵猷肄;董军章
3.基于多项式卡尔曼滤波的船舶轨迹预测算法 [J], 姜佰辰;关键;周伟;陈小龙
4.基于改进核极限学习机和集成学习理论的目标机动轨迹预测 [J], 寇英信;奚之飞;
徐安;李战武;杨爱武
5.基于曲线拟合的机动目标轨迹预测算法研究 [J], 张强;张振标
因版权原因,仅展示原文概要,查看原文内容请购买。