滞后校正
- 格式:pptx
- 大小:356.82 KB
- 文档页数:11
串联滞后校正使用条件串联滞后校正是一种常用于系统控制中的校正方法,可以有效地提高系统的稳定性和控制性能。
它是通过将系统的控制信号与系统的输出信号进行比较,并根据比较结果对控制信号进行调整,从而实现对系统的校正。
在实际应用中,串联滞后校正通常需要满足以下几个条件:1.系统可测量:为了进行串联滞后校正,系统的输出信号必须是可测量的。
只有能够测量到系统的输出信号,才能与控制信号进行比较,从而进行校正。
通常情况下,系统的输出信号可以通过传感器、仪器等测量设备来获取。
2.系统动态性:串联滞后校正主要用于调节系统的动态性能,因此被校正的系统必须具备一定的动态特性。
一般来说,系统的动态特性可以通过其阶数、传递函数或差分方程等数学模型来描述。
只有具备一定的动态特性的系统才能够通过串联滞后校正来提高其动态性能。
3.可调参数:串联滞后校正需要根据比较结果对控制信号进行调整,因此被校正的系统必须具备可调参数。
这些可调参数可以通过调节系统中的一些物理或数学参数来实现,比如增益、时间常数等。
只有具备可调参数的系统才能通过串联滞后校正来对其进行调整和优化。
4.可修改控制信号:串联滞后校正需要将系统的控制信号与系统的输出信号进行比较,并根据比较结果对控制信号进行调整。
因此,被校正的系统必须具备可修改控制信号的能力。
对于数字控制系统而言,该要求通常通过软件编程来实现。
而对于模拟控制系统而言,可能需要使用一些电子元器件来实现对控制信号的调节。
5.系统稳定性:串联滞后校正可以提高系统的稳定性,但仅适用于稳定的系统。
如果被校正的系统本身就不稳定,那么串联滞后校正可能会进一步破坏系统的稳定性。
因此,在进行串联滞后校正之前,需要确保被校正的系统是稳定的。
6.输入信号满足要求:在进行串联滞后校正时,输入信号需要满足一定的要求。
一般来说,输入信号需要具备一定的特性(如平稳性、随机性等),以确保校正的有效性和准确性。
根据具体的应用和系统要求,可能需要对输入信号进行预处理,例如滤波、去噪等操作。
超前校正和滞后校正的使用条件超前校正和滞后校正,这听起来像是那些高深莫测的数学概念,其实不然,今天我们就来聊聊这两位“调皮的小朋友”,看看它们在生活中怎么为我们服务的。
超前校正就像那种总是提前到达的朋友,永远想着“我得早点儿准备好”,而滞后校正呢,就像那种总是慢半拍的家伙,总是说“等一下,我再想想”。
这两者在实际应用中,真的是各有千秋,缺一不可。
说到超前校正,想象一下你正在开车,前方的红灯闪烁着,哦,这时候你得赶紧减速,不能等到快到才急急忙忙踩刹车。
超前校正的意思就是让你提前预判,防止意外的发生。
比如,在生产线上,如果你能提前发现产品的缺陷,咱们就可以及时调整,避免大规模的返工,这不就是为后续省下了不少麻烦嘛!在生活中,我们常常需要这种能力,想想考试前的复习,提前准备,才能在考试时游刃有余,不至于手忙脚乱。
咱们得提提滞后校正,它可不是“慢半拍”的代名词,虽然有时候让人觉得有点儿拖拉。
它其实是一种反应机制,更多的是在事后总结经验教训。
比如说,你刚刚做完一个项目,结果发现有些地方做得不够好,这个时候你得坐下来,分析一下问题出在哪儿,然后再来个大改进。
就像在玩游戏的时候,死了再重来,慢慢积累经验,下次就能把关卡打得漂亮多了。
滞后校正让我们在失误中成长,反思之后再出发,确实是种智慧。
现在,咱们再聊聊这两个“小家伙”在实际应用中的使用条件。
超前校正需要的是清晰的信息和准确的数据。
你得知道前方会发生什么,这样才能提前做出反应。
这就像是天气预报一样,知道今天要下雨,那就提前带把伞。
反之,如果你没有准确的数据,盲目预判,那就容易犯错误,搞得自己手忙脚乱。
试想一下,开车的时候,如果前面有个大坑,你不知道,结果“咣当”一声,别提有多尴尬了。
至于滞后校正,它最适合用在那些可以慢慢调整的地方,比如说生产流程、项目管理之类的。
你得留出时间来反思,不然就是在白忙活,像个无头苍蝇,乱撞不知所措。
特别是在团队合作中,每个人都有自己的意见,慢慢来,听听大家的反馈,咱们才能一起进步。
串联超前校正和滞后校正的不同之处在控制系统中,超前校正和滞后校正是两种常见的校正方法。
它们都是为了提高系统的稳定性和性能而采取的措施。
然而,它们的实现方式和效果却有很大的不同。
本文将从理论和实践两个方面,分别探讨串联超前校正和滞后校正的不同之处。
一、理论分析1. 超前校正超前校正是指在控制系统中,通过提前控制信号的相位,使得系统的相位裕度增加,从而提高系统的稳定性和响应速度。
具体来说,超前校正是通过在控制信号中加入一个比例项和一个积分项,来提高系统的相位裕度。
这样,系统就能更快地响应外部干扰和变化,从而提高系统的性能。
2. 滞后校正滞后校正是指在控制系统中,通过延迟控制信号的相位,使得系统的相位裕度减小,从而提高系统的稳定性和抗干扰能力。
具体来说,滞后校正是通过在控制信号中加入一个比例项和一个微分项,来减小系统的相位裕度。
这样,系统就能更好地抵抗外部干扰和变化,从而提高系统的性能。
二、实践应用1. 超前校正超前校正在实践中的应用非常广泛。
例如,在电力系统中,超前校正可以用来提高电力系统的稳定性和响应速度。
在机械控制系统中,超前校正可以用来提高机械系统的精度和响应速度。
在化工生产中,超前校正可以用来提高化工生产的稳定性和生产效率。
2. 滞后校正滞后校正在实践中的应用也非常广泛。
例如,在飞行控制系统中,滞后校正可以用来提高飞行器的稳定性和抗干扰能力。
在汽车控制系统中,滞后校正可以用来提高汽车的稳定性和安全性。
在医疗设备中,滞后校正可以用来提高医疗设备的精度和稳定性。
总之,串联超前校正和滞后校正是两种常见的校正方法,它们都是为了提高系统的稳定性和性能而采取的措施。
然而,它们的实现方式和效果却有很大的不同。
在实践中,我们需要根据具体的应用场景和需求,选择合适的校正方法,以达到最佳的控制效果。
温度控制系统滞后校正环节设计一、引言在工业生产过程中,温度控制是一个非常重要的环节。
为了保持生产过程的稳定性和质量,需要对温度进行精确的控制。
然而,由于温度传感器存在滞后问题,控制系统输出的温度信号将滞后于实际测量值。
为了解决这个问题,需要设计一个滞后校正环节,用于补偿温度的滞后。
二、滞后校正原理温度传感器的滞后现象主要是由于传感器自身的响应速度和传输延迟引起的。
传感器的响应速度是指传感器从接收输入信号到产生输出信号的过程中所需要的时间。
传输延迟是指信号从传感器到控制系统的传输时间。
滞后校正的原理是在温度控制系统的反馈回路中增加一个补偿环节,通过对输出信号进行滞后处理,实现对温度的滞后校正。
具体的滞后校正算法可以根据传感器的响应速度和传输延迟来确定。
1.滞后校正器的位置:滞后校正器应该放置在温度控制系统的反馈回路中,通常放在控制器的输出端。
2.滞后校正算法:滞后校正算法的设计需要考虑传感器的响应速度和传输延迟。
一种常用的滞后校正算法是通过对输出信号进行延迟处理,使得输出信号与实际温度值保持一致。
具体的算法可以根据实际需求来确定。
3.滞后校正器的参数调试:一旦滞后校正器的算法确定,就需要通过实验来调试滞后校正器的参数。
参数调试包括滞后时间和补偿幅度的确定。
滞后时间是指滞后校正器对输出信号的延迟时间,补偿幅度是指滞后校正器对输出信号的增益。
通过不断调试参数,使得滞后校正器对温度的滞后校正达到最佳效果。
4.稳定性分析:在设计滞后校正环节时,还需要进行稳定性分析。
稳定性分析是指分析滞后校正环节对温度控制系统稳定性的影响。
通过稳定性分析,可以确定滞后校正环节的参数范围,以保证温度控制系统的稳定性。
四、实验验证设计完成滞后校正环节后,还需要进行实验验证。
实验验证可以通过对比滞后校正前后的温度数据来评估滞后校正环节的性能。
实验结果应该接近滞后校正前的实际温度值,以验证滞后校正环节的效果。
五、总结滞后校正环节的设计是温度控制系统中非常重要的一个环节。
相位超前校正和滞后校正的区别相位超前校正和滞后校正是电路中常用的两种方法,用于调整信号的相位。
它们在电子领域中具有重要的应用,尤其在通信系统和控制系统中起着至关重要的作用。
本文将详细介绍相位超前校正和滞后校正的区别。
一、相位超前校正相位超前校正是一种使信号相位提前的技术。
在电路中,我们常常遇到信号相位滞后或者信号延迟的情况,这是由于电路元件的特性或者传输介质的影响所致。
为了解决这个问题,我们可以采用相位超前校正的方法。
相位超前校正的原理是在信号路径中引入一个或多个滤波器,并通过合理设计滤波器的参数,使得滤波器对频率较低的信号具有较大的增益,从而使得信号的相位提前。
相位超前校正常用于控制系统中,以提高系统的稳定性和响应速度。
例如,在飞机的自动驾驶系统中,采用相位超前校正可以使飞机更加稳定地飞行。
二、滞后校正滞后校正则是一种使信号相位延迟的技术。
在某些情况下,我们需要延迟信号的相位,以满足特定的要求。
比如,在音频处理中,我们可能需要将不同的音频信号进行时间对齐,以达到更好的音效效果。
此时,我们可以采用滞后校正的方法来实现。
滞后校正的原理是通过引入一个或多个滤波器,在信号路径中对频率较高的信号进行衰减,从而使得信号的相位发生延迟。
滞后校正常用于音频处理、图像处理等领域,以实现信号的同步和对齐。
例如,在音频混音中,我们可以采用滞后校正的方法,将不同音轨的信号进行时间对齐,以获得更好的混音效果。
三、相位超前校正与滞后校正的区别相位超前校正和滞后校正的区别主要体现在以下几个方面:1. 目的不同:相位超前校正的目的是使信号的相位提前,以提高系统的稳定性和响应速度;滞后校正的目的是使信号的相位延迟,以实现信号的同步和对齐。
2. 原理不同:相位超前校正通过引入滤波器来增益低频信号,从而使得信号的相位提前;滞后校正通过引入滤波器来衰减高频信号,从而使得信号的相位延迟。
3. 应用领域不同:相位超前校正主要应用于控制系统中,以提高系统的稳定性和响应速度;滞后校正主要应用于音频处理、图像处理等领域,以实现信号的同步和对齐。

滞后校正课程设计一、课程目标知识目标:1. 理解滞后校正的基本概念,掌握其在控制系统中的应用。
2. 学会分析滞后现象对控制系统性能的影响。
3. 掌握滞后校正方法,并能运用相关理论知识解决实际问题。
技能目标:1. 能够运用所学的滞后校正方法,设计简单的控制系统校正装置。
2. 培养学生运用数学工具分析控制系统问题的能力。
3. 提高学生在团队协作中沟通、交流、解决问题的能力。
情感态度价值观目标:1. 培养学生对控制学科的兴趣和热爱,激发他们探索科学的精神。
2. 培养学生严谨、务实的学习态度,树立正确的价值观。
3. 增强学生的团队协作意识,培养合作共赢的观念。
课程性质分析:本课程属于控制学科领域,针对滞后校正这一重要知识点进行深入讲解。
课程旨在帮助学生掌握滞后校正的理论和方法,提高解决实际问题的能力。
学生特点分析:学生处于高年级阶段,已具备一定的控制学科基础,具有较强的逻辑思维能力和问题解决能力。
此阶段的学生对实际应用有较高的兴趣,注重理论知识与实践的结合。
教学要求:1. 结合课本内容,注重理论知识与实际应用的结合。
2. 通过案例分析和课堂讨论,引导学生主动思考,培养解决问题的能力。
3. 强化团队协作,提高学生的沟通与交流能力。
4. 注重学习成果的评估,确保学生达到预期目标。
二、教学内容本课程依据课程目标,结合教材相关章节,组织以下教学内容:1. 滞后现象的基本概念及分类- 滞后现象的定义与描述- 滞后的类型及特点2. 滞后现象对控制系统性能的影响- 系统稳定性分析- 系统动态性能分析- 系统稳态性能分析3. 滞后校正方法及其原理- 滞后校正的基本原理- 常见的滞后校正方法:如PID校正、smith预测等- 滞后校正参数的优化方法4. 滞后校正控制器的设计与应用- 校正控制器的设计步骤与方法- 案例分析:实际控制系统中的应用案例- 设计与仿真实验教学大纲安排如下:第一周:滞后现象的基本概念及分类第二周:滞后现象对控制系统性能的影响第三周:滞后校正方法及其原理第四周:滞后校正控制器的设计与应用(含案例分析及仿真实验)教学内容注重科学性和系统性,结合教材章节,确保学生掌握滞后校正相关知识点,为后续的实际应用打下坚实基础。
滞后校正的原理
滞后校正是一种用于修正系统响应滞后的方法,常用于控制系统中。
其原理基于对系统的输出信号进行滞后处理,在时间上对信号进行一定的延迟,以使系统的响应更加准确、稳定。
滞后校正的原理是通过引入一个滞后补偿器来改变控制系统的传递函数。
滞后补偿器由一个或多个衰减器和一个延迟器组成。
衰减器可以减小信号的振幅,而延迟器可以延迟信号的相位。
具体来说,当系统的响应滞后时,可以通过增加延迟器的时间常数来减小滞后。
延迟器会导致系统的相位响应滞后,并减弱系统的频率响应。
通过在系统的传递函数中引入延迟器,可以使系统的相位响应向后移动,从而达到校正滞后的效果。
实际上,滞后校正可以看作是一种频率域设计方法,通过调整系统的频率响应曲线,使其更加接近期望的频率响应。
在控制系统中应用滞后校正可以提高系统的稳定性和响应速度。
总之,滞后校正通过引入延迟器来改变系统的传递函数,从而校正系统响应中的滞后现象。
这种方法可用于改善控制系统的稳定性和响应特性,使系统的性能更加优良。
超前滞后校正的原理
超前滞后校正是一种用于系统控制的方法,目的是根据系统特性来补偿系统的超前或滞后相位,以提高系统的稳定性和性能。
超前滞后校正的原理基于系统的频率响应特性,即系统的幅频响应曲线。
在频率响应曲线上,超前滞后校正通过调整系统的相位和幅度来补偿系统的相位超前或滞后,使系统的频率响应曲线更接近预期的目标曲线。
具体来说,超前滞后校正一般包括以下几个步骤:
1. 频率分析:首先对系统进行频率响应分析,获取系统的幅频响应曲线和相频响应曲线。
2. 设计目标曲线:根据系统的要求,设计一个理想的幅频响应曲线和相频响应曲线。
3. 相位补偿:根据实际系统的相频响应曲线和目标曲线的相位差异,设计合适的相位补偿网络,使系统的相位更接近目标曲线。
4. 幅度补偿:根据实际系统的幅频响应曲线和目标曲线的幅度差异,设计合适的幅度补偿网络,使系统的幅度更接近目标曲线。
5. 调整参数:根据实际系统的频率响应,对相位补偿和幅度补偿网络的参数进行调整,使得系统的频率响应更接近目标曲线,
同时保持系统的稳定性。
通过超前滞后校正,可以有效地补偿系统的相位超前或滞后,提高系统的稳定性和性能。
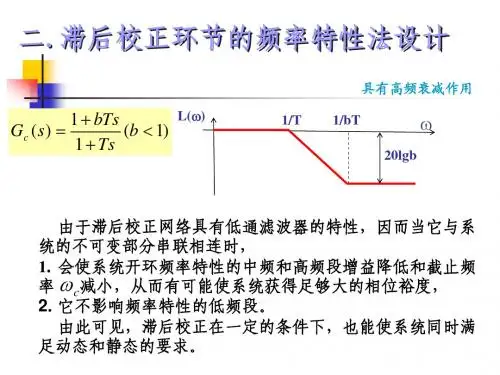
滞后校正原理
滞后校正原理是一种控制系统的校正方法,主要用于改善系统的稳态性能。
其基本原理是利用滞后网络的高频幅值衰减特性,使系统的截止频率下降,从而使系统获得足够的相位裕度。
具体来说,滞后校正通过降低高频增益,使系统的总增益增大,从而改善了稳态精度(降低了稳态误差)。
同时,系统中包含的高频噪音也可以得到衰减,增强了系统的抗干扰能力。
此外,滞后校正还可以保持暂态性能不变的基础上,提高开环增益。
或者等价地说,滞后校正可以补偿因开环增益提高而发生的暂态性能的变化。
总的来说,滞后校正是一种有效的控制系统校正方法,能够改善系统的稳态性能和抗干扰能力。