滞后校正滞后
- 格式:ppt
- 大小:928.50 KB
- 文档页数:27
串联超前校正和滞后校正的不同之处在控制系统中,超前校正和滞后校正是两种常见的校正方法。
它们都是为了提高系统的稳定性和性能而采取的措施。
然而,它们的实现方式和效果却有很大的不同。
本文将从理论和实践两个方面,分别探讨串联超前校正和滞后校正的不同之处。
一、理论分析1. 超前校正超前校正是指在控制系统中,通过提前控制信号的相位,使得系统的相位裕度增加,从而提高系统的稳定性和响应速度。
具体来说,超前校正是通过在控制信号中加入一个比例项和一个积分项,来提高系统的相位裕度。
这样,系统就能更快地响应外部干扰和变化,从而提高系统的性能。
2. 滞后校正滞后校正是指在控制系统中,通过延迟控制信号的相位,使得系统的相位裕度减小,从而提高系统的稳定性和抗干扰能力。
具体来说,滞后校正是通过在控制信号中加入一个比例项和一个微分项,来减小系统的相位裕度。
这样,系统就能更好地抵抗外部干扰和变化,从而提高系统的性能。
二、实践应用1. 超前校正超前校正在实践中的应用非常广泛。
例如,在电力系统中,超前校正可以用来提高电力系统的稳定性和响应速度。
在机械控制系统中,超前校正可以用来提高机械系统的精度和响应速度。
在化工生产中,超前校正可以用来提高化工生产的稳定性和生产效率。
2. 滞后校正滞后校正在实践中的应用也非常广泛。
例如,在飞行控制系统中,滞后校正可以用来提高飞行器的稳定性和抗干扰能力。
在汽车控制系统中,滞后校正可以用来提高汽车的稳定性和安全性。
在医疗设备中,滞后校正可以用来提高医疗设备的精度和稳定性。
总之,串联超前校正和滞后校正是两种常见的校正方法,它们都是为了提高系统的稳定性和性能而采取的措施。
然而,它们的实现方式和效果却有很大的不同。
在实践中,我们需要根据具体的应用场景和需求,选择合适的校正方法,以达到最佳的控制效果。
温度控制系统滞后校正环节设计一、引言在工业生产过程中,温度控制是一个非常重要的环节。
为了保持生产过程的稳定性和质量,需要对温度进行精确的控制。
然而,由于温度传感器存在滞后问题,控制系统输出的温度信号将滞后于实际测量值。
为了解决这个问题,需要设计一个滞后校正环节,用于补偿温度的滞后。
二、滞后校正原理温度传感器的滞后现象主要是由于传感器自身的响应速度和传输延迟引起的。
传感器的响应速度是指传感器从接收输入信号到产生输出信号的过程中所需要的时间。
传输延迟是指信号从传感器到控制系统的传输时间。
滞后校正的原理是在温度控制系统的反馈回路中增加一个补偿环节,通过对输出信号进行滞后处理,实现对温度的滞后校正。
具体的滞后校正算法可以根据传感器的响应速度和传输延迟来确定。
1.滞后校正器的位置:滞后校正器应该放置在温度控制系统的反馈回路中,通常放在控制器的输出端。
2.滞后校正算法:滞后校正算法的设计需要考虑传感器的响应速度和传输延迟。
一种常用的滞后校正算法是通过对输出信号进行延迟处理,使得输出信号与实际温度值保持一致。
具体的算法可以根据实际需求来确定。
3.滞后校正器的参数调试:一旦滞后校正器的算法确定,就需要通过实验来调试滞后校正器的参数。
参数调试包括滞后时间和补偿幅度的确定。
滞后时间是指滞后校正器对输出信号的延迟时间,补偿幅度是指滞后校正器对输出信号的增益。
通过不断调试参数,使得滞后校正器对温度的滞后校正达到最佳效果。
4.稳定性分析:在设计滞后校正环节时,还需要进行稳定性分析。
稳定性分析是指分析滞后校正环节对温度控制系统稳定性的影响。
通过稳定性分析,可以确定滞后校正环节的参数范围,以保证温度控制系统的稳定性。
四、实验验证设计完成滞后校正环节后,还需要进行实验验证。
实验验证可以通过对比滞后校正前后的温度数据来评估滞后校正环节的性能。
实验结果应该接近滞后校正前的实际温度值,以验证滞后校正环节的效果。
五、总结滞后校正环节的设计是温度控制系统中非常重要的一个环节。
相位超前和滞后在控制系统中的作用如下:
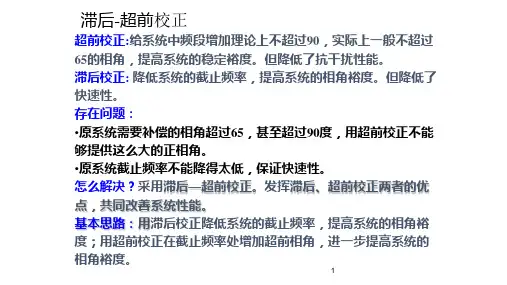
1. 超前校正:目的是改善系统的动态性能,在系统静态性能不受损的前提下,提高系统的动态性能。
通过加入超前校正环节,利用其相位超前特性来增大系统的相位裕度,改变系统的开环频率特性。
一般使校正环节的最大相位超前角出现在系统新的穿越频率点。
2. 滞后校正:通过加入滞后校正环节,使系统的开环增益有较大幅度增加,同时又使校正后的系统动态指标保持原系统的良好状态。
它利用滞后校正环节的低通滤波特性,在不影响校正后系统低频特性的情况下,使校正后系统中高频段增益降低,从而使其穿越频率前移,达到增加系统相位裕度的目的。
3. 滞后-超前校正:是滞后校正与超前校正的组合。
它具有超前校正的提高系统相对稳定性和响应快速性;同时又具有滞后校正的不影响原有动态性能的前提下,提高系统的开环增益,改善系统的稳定性能。
它具有低频端和高频端频率衰减的特性,故又称带通滤波器。
这种校正方式适用于对校正后系统的动态和静态性能有更多更高要求的场合。
滞后校正的最大滞后角滞后校正的最大滞后角,这听起来像是从科幻电影里走出来的词汇,对吧?但这东西就在我们的生活中,想象一下,咱们家里的小车子,每次打方向的时候,总得等几秒钟才能转过来。
那种感觉就像是大海中的巨轮,想要调头,得等好久才能看到效果。
滞后校正嘛,就是给这个过程加点调味料,让它更顺畅。
你瞧,咱们在开车时,想要迅速应对突发情况,最好就得懂点这些原理。
说到滞后,脑海中浮现的就是那种一两秒的延迟。
就像咱们玩游戏时,敌人早已动手,结果你还在原地呆着,手忙脚乱。
这就说明了,反应得跟上去才行,要不然就是“慢半拍”。
在技术上,这个最大滞后角其实是用来衡量系统反应速度的,就像那小孩等着要吃糖果,眼巴巴地盯着,结果却得等个不停,真是让人着急。
想象一下,开车时,前方出现了个小猫,咱们得快速反应,可是车子却像是喝醉了一样,慢悠悠地才开始转向。
这时候,滞后校正就显得尤为重要了。
它就像是给车子喝了提神饮料,让它能迅速应对各种突发情况。
生活中不止开车需要这种东西,任何时候的反应都得灵活,比如我们在工作中,遇到突发状况得及时处理,那就需要这种“滞后校正”的思维了。
说到这里,我就忍不住想起我那可爱的老爸,每次看电视时,总喜欢调高音量,结果每次人家说完了,他才反应过来。
这种情况就像在做滞后校正,反应慢半拍,关键时刻总是掉链子。
生活中的各种小细节,都在告诉我们,反应要快,才不至于错失良机。
在技术上,滞后校正最大滞后角就像是一种魔法,让系统的反应更加灵活。
就像咱们做饭时,油温上升得太慢,想炸个鸡腿,等了老半天,结果鸡腿已经凉了。
这时候,就得控制好油温的调节速度,确保它能迅速到位。
就算是一点小小的变化,也能影响最终的结果,真是让人感慨科技的神奇。
有些朋友可能会问,滞后校正的最大滞后角到底有什么用呢?这玩意儿不仅仅在机械设备中用得到,日常生活中也能找到它的身影。
比如说,在运动中,身体的反应速度就是一个滞后校正的过程。
咱们在打篮球时,得迅速判断球的方向,如果等得太久,那可就成了“慢半拍”的典型,球飞过头顶,真是让人哭笑不得。
相位超前校正和滞后校正的区别相位超前校正和滞后校正是电路中常用的两种方法,用于调整信号的相位。
它们在电子领域中具有重要的应用,尤其在通信系统和控制系统中起着至关重要的作用。
本文将详细介绍相位超前校正和滞后校正的区别。
一、相位超前校正相位超前校正是一种使信号相位提前的技术。
在电路中,我们常常遇到信号相位滞后或者信号延迟的情况,这是由于电路元件的特性或者传输介质的影响所致。
为了解决这个问题,我们可以采用相位超前校正的方法。
相位超前校正的原理是在信号路径中引入一个或多个滤波器,并通过合理设计滤波器的参数,使得滤波器对频率较低的信号具有较大的增益,从而使得信号的相位提前。
相位超前校正常用于控制系统中,以提高系统的稳定性和响应速度。
例如,在飞机的自动驾驶系统中,采用相位超前校正可以使飞机更加稳定地飞行。
二、滞后校正滞后校正则是一种使信号相位延迟的技术。
在某些情况下,我们需要延迟信号的相位,以满足特定的要求。
比如,在音频处理中,我们可能需要将不同的音频信号进行时间对齐,以达到更好的音效效果。
此时,我们可以采用滞后校正的方法来实现。
滞后校正的原理是通过引入一个或多个滤波器,在信号路径中对频率较高的信号进行衰减,从而使得信号的相位发生延迟。
滞后校正常用于音频处理、图像处理等领域,以实现信号的同步和对齐。
例如,在音频混音中,我们可以采用滞后校正的方法,将不同音轨的信号进行时间对齐,以获得更好的混音效果。
三、相位超前校正与滞后校正的区别相位超前校正和滞后校正的区别主要体现在以下几个方面:1. 目的不同:相位超前校正的目的是使信号的相位提前,以提高系统的稳定性和响应速度;滞后校正的目的是使信号的相位延迟,以实现信号的同步和对齐。
2. 原理不同:相位超前校正通过引入滤波器来增益低频信号,从而使得信号的相位提前;滞后校正通过引入滤波器来衰减高频信号,从而使得信号的相位延迟。
3. 应用领域不同:相位超前校正主要应用于控制系统中,以提高系统的稳定性和响应速度;滞后校正主要应用于音频处理、图像处理等领域,以实现信号的同步和对齐。
滞后校正的原理
滞后校正是一种用于修正系统响应滞后的方法,常用于控制系统中。
其原理基于对系统的输出信号进行滞后处理,在时间上对信号进行一定的延迟,以使系统的响应更加准确、稳定。
滞后校正的原理是通过引入一个滞后补偿器来改变控制系统的传递函数。
滞后补偿器由一个或多个衰减器和一个延迟器组成。
衰减器可以减小信号的振幅,而延迟器可以延迟信号的相位。
具体来说,当系统的响应滞后时,可以通过增加延迟器的时间常数来减小滞后。
延迟器会导致系统的相位响应滞后,并减弱系统的频率响应。
通过在系统的传递函数中引入延迟器,可以使系统的相位响应向后移动,从而达到校正滞后的效果。
实际上,滞后校正可以看作是一种频率域设计方法,通过调整系统的频率响应曲线,使其更加接近期望的频率响应。
在控制系统中应用滞后校正可以提高系统的稳定性和响应速度。
总之,滞后校正通过引入延迟器来改变系统的传递函数,从而校正系统响应中的滞后现象。
这种方法可用于改善控制系统的稳定性和响应特性,使系统的性能更加优良。
串联滞后校正设计串联滞后校正是一种常用的控制系统设计方法,具有广泛的应用价值。
在工业自动化、电力系统、机械控制等领域中,我们经常会遇到需要对信号进行滞后校正的情况。
而串联滞后校正正是为此而设计的一种有效方式。
首先,让我们了解一下串联滞后校正的基本原理。
在一个典型的控制系统中,输入信号会经过一系列传递函数的作用,最终得到输出信号。
然而,由于传递函数的特性可能导致输出信号的滞后或者超前情况。
为了解决这个问题,我们引入了串联滞后校正。
在串联滞后校正中,我们使用了一个称为滞后校正器的设备。
滞后校正器由一个或多个滞后环节组成,通过适当的传递函数设计,可以使输入信号在经过滞后校正器后得到所需的滞后效果。
这样,输出信号就能更加精确地与输入信号同步。
串联滞后校正的设计方法有很多。
一种常用的方法是根据系统的频率响应特性,选择适当的传递函数。
根据实际应用需求,我们可以选择不同类型的滞后校正器,如一阶滞后校正器、二阶滞后校正器等。
通过调整传递函数的参数,可以实现不同程度的滞后校正效果。
除了传递函数的选择外,还需要考虑滞后校正器的结构设计。
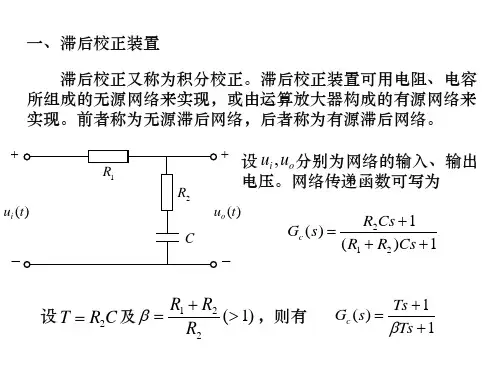
滞后校正器通常由运算放大器、电容、电阻等元件构成。
这些元件的选择和连接方式对滞后校正器的性能起着重要作用。
合理地设计这些元件的数值和位置,可以使滞后校正器的性能达到最佳状态。
同时,我们还需要注意滞后校正器的稳定性问题。
在设计和搭建滞后校正器时,必须考虑系统的稳定性要求。
通过合理地选择传递函数和元件参数,可以使滞后校正器在满足滞后要求的同时,保持系统的稳定性。
这对于控制系统的正常运行具有至关重要的意义。
综上所述,串联滞后校正是一种有效的控制系统设计方法。
通过合理地选择传递函数和元件参数,可以实现输入信号滞后校正的需求。
在实际应用中,我们需要根据具体情况进行滞后校正器的设计,并确保其稳定性和性能。
希望通过这篇文章的介绍,读者对串联滞后校正的设计方法有了更加全面的了解,能够在实践中灵活应用,提高控制系统的性能和稳定性。