平面一般力系的平衡方程
- 格式:doc
- 大小:174.00 KB
- 文档页数:8

平面一般力系的二力矩式平衡方程平面一般力系的二力矩式平衡方程引言在物理学和工程学中,力学的平衡是一个重要的概念。
力学的平衡可以分为平面力系的平衡和空间力系的平衡。
在本文中,我们将讨论平面力系的平衡,并重点关注二力矩式平衡方程。
平面力系的定义和特点平面力系是指作用在一个平面内的一组力。
平面力系具有以下特点:1. 所有的力和力矩都在一个平面内;2. 力系中的力可以同时作用在一个物体的不同点上;3. 力系中的力可能会产生力矩。
力矩的概念力矩是指力对旋转物体造成的影响。
它由两个因素确定:力的大小和作用点与旋转轴的距离。
力矩的大小可以通过以下公式计算:M = Fd其中,M表示力矩,F表示力的大小,d表示力的作用点与旋转轴之间的距离。
力矩的方向可以通过以下规则确定:1. 如果力的作用点在旋转轴上,力矩的大小为零;2. 如果力由旋转轴向外作用,力矩的方向为顺时针方向;3. 如果力由旋转轴向内作用,力矩的方向为逆时针方向。
二力矩式平衡方程的推导在平面力系中,如果力系处于平衡状态,那么力系的合力和合力矩都必须为零。
根据牛顿第一定律,合力为零意味着物体的加速度为零;根据牛顿第二定律,合力矩为零意味着物体的角加速度为零。
设平面力系中共有n个力,分别记为F1, F2, ..., Fn。
考虑到每个力都可以产生力矩,那么每个力产生的力矩之和为:M1 + M2 + ... + Mn = 0力矩的正负号要根据力矩的方向来确定,根据上述力矩的规则,如果力矩是顺时针方向的,那么取正号;如果力矩是逆时针方向的,那么取负号。
根据力矩的计算公式,将每个力的力矩带入上述方程,得到二力矩式平衡方程:F1d1 + F2d2 + ... + Fndn = 0这就是平面力系的二力矩式平衡方程。
应用实例下面通过一个实例来说明如何应用二力矩式平衡方程。
假设有一个悬臂梁,上面有一个重物挂着。
悬臂梁的长度为L,重物的质量为m,重物与悬臂梁的连接处距离悬臂梁固定点的距离为d。
平面一般力系的平衡方程的三种形式
平面一般力系的平衡方程有以下三种形式:
1. 矢量和式形式:若平面一般力系中作用力F1、F2、F3、...、Fn与参考点O的连线分别为r1、r2、r3、...、rn,且F1、F2、
F3、...、Fn的和为零,则平衡条件可以表示为F1 + F2 + F3 + ...
+ Fn = 0。
2. 分力和式形式:根据平面一般力系的平衡条件,可以将作用
在此力系上的力分解为水平分力和垂直分力。
平衡条件可以表示为水
平分力的和等于零,即∑Fx = 0;垂直分力的和等于零,即∑Fy = 0。
3. 正负向分式形式:根据平面一般力系的平衡条件,可以选择
合适的坐标系,将力的方向分为正向和负向。
若力Fi与坐标系确定的
正向相背离,则可表示为Fi > 0;若力Fi与坐标系确定的正向相同,则可表示为Fi < 0。
平衡条件可以表示为所有正向力的代数和等于所
有负向力的代数和,即ΣFi > 0 - ΣFi < 0 = 0。
以上是平面一般力系的平衡方程的三种形式。
平面一般力平面一般力系:平面一般力系:指的是力系中各力的作用线在同一平面内任意分布的力系称为平面一般力系。
又称为平面任意力系。
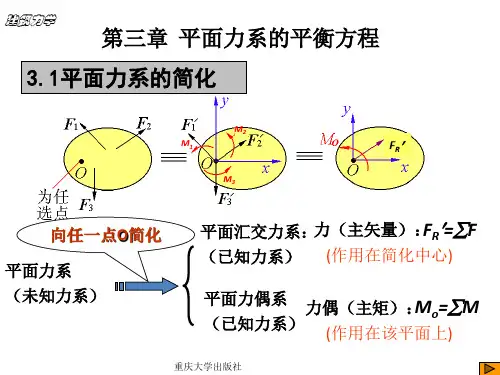
平面一般力系通常可以简化为一个力和一个力偶共同作用的情况。
平面一般力系的平衡条件是;平面一般力系中,所有各力在力系作用的平面内,两个互相垂直的坐标轴上投影的代数和分别等于零。
即平面一般力系平衡的充分必要条件:主矢量和主矩都为零。
其平衡方程为:ΣFx=0ΣFy=0ΣMo(F)=0即力系中所有各力在两个坐标轴中每一轴上的投影的代数和都等于零;力系中所有各力对于任一点的力矩的代数和等于零2.平衡方程的应用平衡方程虽然有三种形式,但不论采用哪种形式,都只能写出三个独立的平衡方程。
因此,应用平面一般力系的平衡方程,只能求解三个未知量。
应用平面一般力系平衡方程解题的步骤如下:①确定研究对象。
根据题意,取能反映出未知量和已知量关系的物体为研究对象。
②画受力图。
在研究对象上画出它受到的所有主动力和约束反力。
约束反力根据约束类型来画。
约束反力的方向未定时,一般可用两个相互垂直的分反力表示;当约束反力的指向未定时,必须先假设其指向。
如计算结果为正,则表示假设的指向正确;如果计算结果为负,则表示真实的指向与假设的相反。
③建立坐标系,列平衡方程。
选取适当的平衡方程形式、投影轴和矩心。
选取哪种形式的平衡方程,完全取决于计算的方便与否。
通常力求在一个平衡方程中只包含一个未知量,以免求解联立方程。
在应用投影方程时,投影轴应尽可能选取与较多的未知力的作用线垂直;应用力矩方程时,矩心应选取在两个未知力的交点。
计算力矩时,要善于运用合力矩定理,以便使计算简单。
④解平衡方程,求得未知量。
⑤校核。
列出非独立的平衡方程,以检查解题的正确与否。
第3章 力系的平衡条件与平衡方程3.1 平面力系的平衡条件与平衡方程3.1.1 平面一般力系的平衡条件与平衡方程如果一个平面一般力系的主矢和力系对任一点的主矩同时都等于零,物体将不会移动也不会转动,则该物体处于平衡状态。
力系平衡的充分必要条件:力系的主矢和力系对任一点的主矩都分别等于零,即 110()0i n R i n O O ii F F M M F ==⎫==⎪⎪⎬⎪==⎪⎭∑∑平衡条件的解析式:11100()0nix i niy i n O i i F F M F ===⎫=⎪⎪⎪=⎬⎪⎪=⎪⎭∑∑∑ 或 00()0x y O F F M F ⎫=⎪⎪=⎬⎪=⎪⎭∑∑∑ 平面一般力系的平衡方程该式表明,平面一般力系的平衡条件也可叙述为:力系中各力在任选的坐标轴上的投影的代数和分别等于零,以及各力对任一点的矩的代数和也等于零。
平面汇交力系:平面汇交力系对平面内任意一点的主矩都等于零,即恒满足()0O M F ≡∑物体在平面汇交力系作用下平衡方程:00x yF F ⎫=⎪⎬=⎪⎭∑∑例题3-1 图所示为悬臂式吊车结构图。
其中AB 为吊车大梁,BC为钢索,A 处为固定铰支座,B 处为铰链约束。
已知起重电动机E 与重物的总重量为PF (因为两滑轮之间的距离很小,PF 可视为集中力作用在大梁上)梁的重力为QF 已知角度30θ=。
求:1、电动机处于任意位置时,钢索BC所受的力和支座A处的约束力;2、分析电动机处于什么位置时。
钢索受力最大,并确定其数值。
解:1、选择研究对象以大梁为研究对象,对其作受力分析,并建立图示坐标系。
建立平衡方程 取A 为矩心。
根据()0A M F =∑sin 02Q P TB lF F x F l θ-⨯-⨯+⨯=222sin 2sin30P Q P Q P TB QlF x F F x F l F x F F l l l θ⨯+⨯+===+由xF =∑cos 0Ax TB F F θ-=2()cos303()2Q P P Ax Q F F x F x F F l l =+=+由yF =∑sin 0Ay Q P TB F F F F θ---+=122[()]2Q P Ay Q P TB Q P Q P F F x F F F F F F l F l xF l =--+=--++-=-+由 2P TB QF x F F l =+ 可知当x l =时钢索受力最大, 其最大值为 22P TB Q P QF lF F F F l =+=+在平面力系的情形下,力矩中心应尽量选在两个或多个未知力的交点上,这样建立的力矩平衡方程中将不包含这些未知力;坐标系中坐标轴取向应尽量与多数未知力相垂直,从而这些未知力在这一坐标轴上的投影等于零,这样可减少力的平衡方程中未知力的数目。
第九讲内容一、平面一般力系平衡方程的其他形式前面我们通过平面一般力系的平衡条件导出了平面一般力系平衡方程的基本形式,除了这种形式外,还可将平衡方程表示为二力矩形式及三力矩形式。
1.二力矩形式的平衡方程在力系作用面内任取两点A、B及X轴,如图4 —13所示,可以证明平面一般力系的平衡方程可改写成两个力矩方程和一个投影方程的形式,即X0M A 0 (4 —6)M B 0式中X轴不与A B两点的连线垂直。
证明:首先将平面一般力系向A点简化,一般可得到过A点的一个力和一个力偶。
若M A 0成立,则力系只能简化为通过A点的合力R或成平衡状态。
如果M B 0又成立,说明R必通过B。
可见合力R的作用线必为AB连线。
又因X 0成立,则R x X 0,即合力R在X轴上的投影为零,因AB连线不垂直X轴,合力R亦不垂直于X轴,由R X 0可推得R 0。
可见满足方程(4 - 6)的平面一般力系,若将其向A点简化,其主矩和主矢都等于零,从而力系必为平衡力系。
2.三力矩形式的平衡方程在力系作用面内任意取三个不在一直线上的点示,则力系的平衡方程可写为三个力矩方程形式,即M A 0M B 0M C 0式中,A B、C三点不在同一直线上。
A B C,如图4—14所4—7)同上面讨论一样,若M A 0和M B 0成立,则力系合成结果只能是通过A、B两点的一个力(图 4 —14)或者平衡。
如果M C 0也成立,则合力必然通过C点,而一个力不可能同时通过不在一直线上的三点,除非合力为零,M e 0才能成立。
因此,力系必然是平衡力系。
综上所述,平面一般力系共有三种不同形式的平衡方程,即式(4 - 5)、式(4 —6)、式(4—7),在解题时可以根据具体情况选取某一种形式。
无论采用哪种形式,都只能写出三个独立的平衡方程,求解三个未知数。
任何第四个方程都不是独立的,但可以利用这个方程来校核计算的结果。
【例4 —7】某屋架如图 4 —15 (a)所示,设左屋架及盖瓦共重P 3kN,右屋架受到风力及荷载作用,其合力P2 7kN , P2与BC夹角为80,试求A、B支座的反力。
.......................
装.............订..........
线
.....................
.
分配记
20 各力在x轴上的投影均为零,即∑Fx ≡0。
于是平面平行力系只有两独立的平衡方程,即
∑Fy=0
∑MO(F)=0
不难看出,平面平行力系的二矩式平衡方程为
∑MA(F) =0
∑MB(F) =0
其中A、B两点的连线不能与各力平行。
平面平行力系只有两个独立的方程,因而最多能解出两个未知量。
三.应用平面一般力系平衡方程的解题步骤如下:
(1)根据题意,选取适当的研究对象。
(2)受力分析并画受力图。
(3)选取坐标轴。
坐标轴应与较多的未知反力平行或垂直。
(4)列平衡方程,求解未知量。
列力矩方程时,通常选未知力较多的交点为矩心。
(5)校核结果。
应当注意:若由平衡方程解出的未知量为负,说明受力图上原假定的该未知量的方向与其实际方向相反。
而不要去改动受力图中原假设的方向。
例4-2已知F=15kN,M=3kN.m,求A、B处支座反力。
解(1)画受力图,并建坐标系
(2)列方程求解
图4-8
分配记
20 例4-3如图3-9所示外伸梁上作用有集中力FC=20kN,力偶矩M=
10kN.m ,载荷集度为q=10kN/m的均布载荷。
求支座A、B处的反力。
图4-9
解取水平梁AB为研究对象, 画受力图如图4-9(b)所示。
列平衡方程并求解
分配记
结果均为正,说明图示方向与实际方向一致。
例3-4塔式起重机如图4-10所示。
设机架自重为G,重心在C点,与右轨
距离为e,载重W,吊臂最远端距右轨为l,平衡锤重Q,离左轨的距离为a,
轨距为b。
试求塔式起重机在满载和空载时都不致翻倒的平衡锤重量的范围。
图4-10
解取塔式起重机为研究对象,作用在起重机上的力有重物W、机架重G、
平衡锤的重力Q及钢轨的约束反力NA和NB,这些力构成了平面平行力系,
起重机在该平面平行力系作用下平衡。
(1)满载时W=Wmax,Q=Qmin,机架可能绕B点右翻,在临界平
衡状态,A处悬空,NA=0,受力图如图3-10b所示。
则
分配记
(2)空载时W=0,Q=Qmax,机架可能绕A点左翻,在临界平衡状
态,B处悬空,NB=0,受力图如图3-10c所示。
则
故平衡锤的范围应满足不等式
例4-5一简易起重机如图4-11所示。
横梁AB的A端为固定铰支座,B端
用拉杆BC与立柱相连。
已知梁的重力G1=4kN,载荷G2=12kN,横梁长L
=6m,α=30°,求当载荷距A端距离x=4m时,拉杆BC的受力和铰支座A
的约束反力。
图4-11
分配记解取横梁AB为研究对象,画受力图如图4-11(b)所示。
列平衡方程并求解
小结对于平面任意力系的三种形式的方程组,都可以求解平面任意力系的平衡问题。
但对于单个刚体来说,只能列出三个独立的方程,求解三个未知量。
在具体解题时,要通过合理选取矩心和投影轴,合理的选用方程组的形式,尽量避免联立解方程组的麻烦。
另外,平面平行力系是平面任意力系的一种特殊情形。
复习思考题、作业题1、思考平面汇交力系的平衡方程中,可否取两个力矩方程,或
一个力矩方程和一个投影方程?这时,其矩心和投影轴的选择有什么限制?
2、课本习题4-7、4-6。
下次课预习要点物体系的平衡
静定和超静定问题。