j =0 n
其中: 调节器第n 次采样输出值; 其中:u (n) :调节器第 次采样输出值;
e(n) :第 n 次采样的偏差值; 次采样的偏差值;
e(n − 1) :第 (n-1)次采样的偏差值; 次采样的偏差值; 次采样的偏差值
PLC 09 3
K p :比例系数; 比例系数; 比例系数 Ts K i = K p :积分系数;(教材式 7- 2 有误) 积分系数;( ;(教材式 有误) Ti Td K d = K p :微分系数。 微分系数。 Ts
1 u (t ) = K p [e(t ) + Ti de(t ) ∫0 e(t )dt + Td dt ]
t
2
PLC 09
PID算法的传递函数 算法的传递函数
G ( s) =
U ( s) 1 = K p [1 + + Td s ] E ( s) Ti s
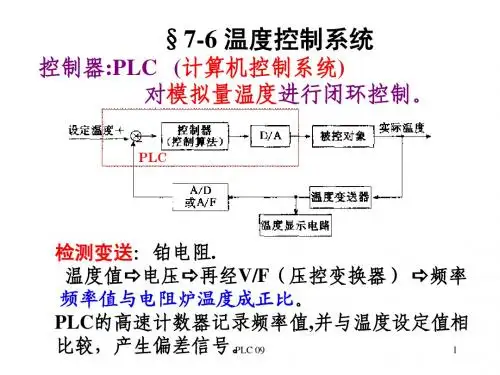
2.数字PID控制算法 .数字 控制算法
位置式算法: 位置式算法 设采样周期为T 离散化连续PID算法 设采样周期为 s,离散化连续 算法 求和代替积分,差分代替微分) (求和代替积分,差分代替微分) Ts n Td u (n) = K p {e(n) + ∑ e( j ) + [e(n) − e( n − 1)]} Ti j = 0 Ts = K p e(n) + K i ∑ e( j ) + K d ∆e(n)
0.8 y (kT − T ) + 0.2 y (kT )
表明: 表明:在滤波结果中起主要作用的是 y(kT−T)
是前一时刻的滤波值而不是当前时刻的采样值。 前一时刻的滤波值而不是当前时刻的采样值。 而不是当前时刻的采样值
y 例如: 相差1倍 例如: (kT − T ) = 0.5, y ( kT ) = 1, 相差 倍; y (kT ) = 0.8 y (kT − T ) + 0.2 y (kT ) = 0.6