多旋翼无人机技术基础9
- 格式:ppt
- 大小:3.56 MB
- 文档页数:50
消防⽤多旋翼⽆⼈机系统技术标准UAV 中国⽆⼈机产业联盟标准消防⽤多旋翼⽆⼈机系统技术要求2015-10-31发布———————————————————————————————————中国⽆⼈机产业联盟发布前⾔本标准的全部技术内容为⾏业内认可标准。
本标准按照GB/T 1.1-2009给出的规则起草。
本标准由中国⽆⼈机产业联盟提出。
本标准主要起草单位:国鹰航空科技有限公司、中国电⼦科技⼤学、南京航空航天⼤学、西北⼯业⼤学、海鹰航空通⽤装备有限责任公司、华南理⼯⼤学、哈尔滨⼯程⼤学、深圳⼀电科技有限公司、深圳市科⽐特航空科技有限公司、⼴州长天航空(Space Arrow)科技有限公司、深圳九星智能航空科技有限公司、深圳九星天利科技有限公司、深圳科卫泰实业发展有限公司、中国⼈民解放军总参谋部第六⼗研究所、深圳洲际通航科技有限公司、深圳市彩虹鹰⽆⼈机研究院有限公司、深圳市创翼睿翔天空科技有限公司、保千⾥视像科技集团股份有限公司、深圳华越⽆⼈机技术有限公司、深圳⾼科新农技术有限公司、深圳市艾特航空科技有限公司、深圳市盛⽲⽆⼈飞机科技有限公司、深圳警圣电⼦科技有限公司、深圳市森讯达电⼦有限公司、深圳⾦狮安防⽆⼈机有限公司、⼴东泰⼀⾼新技术发展有限公司、南京交研科技实业有限公司、合肥佳讯科技有限公司、安徽泽众安全科技有限公司、深圳市万华信息科技有限公司、天仞航空科技有限公司、承德鹰眼电⼦科技有限公司。
本标准主要起草⼈:陶军⽣、胡志昂、宋鸿、杨⾦才、孙志坚、饶军、邵振海、吕明云、李春波、肖⽂建、刘伟、杨⾦铭、庞伟。
本标准与2015年10⽉31⽇发布。
⽬次1 范围 (4)2 规范性引⽤⽂件 (4)3 术语 (4)4 系统构成 (5)5 技术要求 (5)5.1 功能要求 (5)5.2 性能要求 (6)6 信息传输 (7)6.1 通⽤要求 (7)6.2 视频流传输 (7)7 环境适应性 (7)7.1 ⽓候环境适应性 (7)7.2 机械环境适应性 (8)8 安全性 (9)8.1 绝缘电阻 (9)8.2 抗电强度 (9)8.3 泄漏电流 (9)8.4 防过热 (10)9 电磁兼容 (10)9.1 电磁⼲扰 (10)9.2 电磁辐射防护 (11)10 质量保证规定 (11)10.1 检验与测试 (11)10.2 原材料质量 (11)11 产品信息要求 (11)11.1 产品标志 (11)11.2 产品清单 (11)11.3 产品说明书 (11)消防⽤多旋翼⽆⼈机系统技术要求1范围本标准规定了消防⽤多旋翼⽆⼈机系统的术语和定义、功能要求、性能要求,环境适应性、安全性、电磁兼容,是设计、制造和检验消防⽤多旋翼⽆⼈机系统的基本依据。
无人机操作教案三篇篇一:多旋翼无人机操作教案课程名称:多旋翼无人机操作基础授课教师:程名称:多旋翼无人机操作基础授课教师:课时二课时课程内容一、组织教学二、复习前一节课的内容三、导入新课四、教学内容:1、无人飞行器的种类繁多,主要包括飞艇、固定翼无人机、伞翼无人机、扑翼无人机、变翼无人机、旋翼式无人机等。
2、多旋翼飞行器也称为多轴飞行器,是直升机的一种,它通常有3个以上的旋翼。
飞行器的机动性通过改变不同旋翼的扭力和转速来实现。
相比传统的单水平旋翼直升机,它构造精简,易于维护,操作简便,稳定性高且携带方便。
常见的多旋翼飞行器。
3、四旋翼,六旋翼和八旋翼,被广泛用于影视航拍、安全监控、农业植保、电力巡线等领域(多旋翼无人机)(航拍无人机)(固定翼无人机)课程后记学员对无人机的用途很有兴趣程名称:多旋翼无人机操作基础授课教师:课题多旋翼飞行器的构造教学目标1、多旋翼飞行器的原件构造和组成。
2、多旋翼飞行器各个配件的应用。
教学重点多旋翼飞行器组成构造及应用教材分析多旋翼飞行器重要组成构件的理解教学方法讲授法授课类型新课课时四课时课程内容一、组织教学二、复习前一节课的内容三、导入新课四、教学内容:1、多旋翼飞行器主要由机架、电机、电调和桨叶组成,为了满足实际飞行需要,一般还需要配备电池、遥控器及飞行辅助控制系统。
(无人机的组成及构造)2、机架:机架是指多旋翼飞行器的机身架,是整个飞行系统的飞行载体。
一般使用高强度重量轻的材料,例如碳纤维、PA66+30GF等材料。
3、电机是由电动机主体和驱动器组成,是一种典型的机电一体化产品。
在整个飞行系统中,起到提供动力的作用。
4、电调全称电子调速器,英文electronic speed controller,简称ESC。
在整个飞行系统中,电调主要提供驱动电机的指令,课程名称:多旋翼无人机操作基础授课教师:3、垂直运动,即升降控制,在图(a)中,两对电机转向相反,可以平衡其对机身的反扭矩,当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。
AOPA多旋翼基础理论+综合问答测试卷11、A007.中空无人机任务高度一般在______之间——[单选题]A 0~100mB 100~1000mC 1000~6000m正确答案:C2、B027.活塞发动机系统常采用的增压技术主要是用来______——[单选题]A 提高功率B 减少废气量C 增加转速正确答案:A3、D048.在地表的风向稍微不同于地表之上几千英尺高度的风向的原因是______——[单选题]A 当地地形影响气压B 地面有较强的地转偏向力C 风和地面之间的磨擦作用正确答案:C4、B023.______两者组合统称为供电系统——[单选题]A 电缆与配电B 电源与电缆C 电源与配电正确答案:C5、D067.空气中容纳水汽的数量随气温变化,气温越高,则______——[单选题]A 可以容纳的水汽就越少B 可以容纳的水汽就越多C 当空气不能再容纳更多的水汽时,温度就会变化正确答案:B6、E010.下面哪个单位领导全国的飞行管制工作——[单选题]A 国务院B 民航局C 国务院﹑中央军委空中交通管制委员会正确答案:C7、D080.快速移动的冷锋受实际锋面后远处的强烈压力系统推动,在快速移动的冷锋之后______——[单选题]A 可能出现乌云密布的天空和下雨B 天空通常很快放晴C 阵风减缓和温度升高正确答案:B8、G055.下列不属于对无人机驾驶员训练要求的是______——[单选题]A 在模拟器实施正常飞行程序,不少于3小时B 在模拟器训练系统实施正常飞行程序操作,不少于10小时C 在模拟器实施应急飞行程序操作,包括规避航空器,发动机故障,链路丢失,应急回收,迫降等,不少于3小时正确答案:C9、B035.大型无人机计算装载重量和重心的方法主要有:计算法.图表法和______——[单选题]A 试凑法B 查表法C 约取法正确答案:A10、A002.短程无人机活动半径在______以内。
(1分)——[单选题]A 15kmB 15~50kmC 50~200km正确答案:B11、B024.______的功能是向无人机各用电系统或设备提供满足预定设计要求的电能。
无人机,也称无人飞行器,英文Unmannedaerial vehicle(UAV)无人飞行器是一种配置了数据处理系统、传感器、自动控制系统和通讯系统等必要机载设备的飞行器。
无人机技术是一项设计多个技术领域的综合系统,它对通讯技术、传感器技术、人工智能技术、图像处理技术模式识别技术、现代控制理论都有较深的运用和较高的要求。
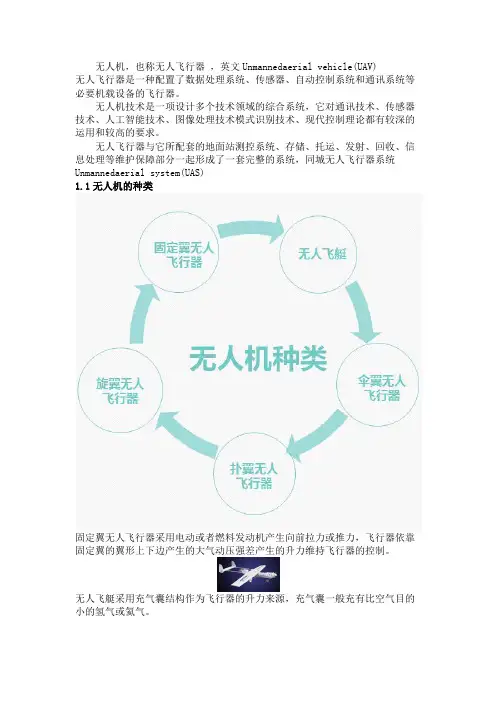
无人飞行器与它所配套的地面站测控系统、存储、托运、发射、回收、信息处理等维护保障部分一起形成了一套完整的系统,同城无人飞行器系统Unmannedaerial system(UAS)1.1无人机的种类固定翼无人飞行器采用电动或者燃料发动机产生向前拉力或推力,飞行器依靠固定翼的翼形上下边产生的大气动压强差产生的升力维持飞行器的控制。
无人飞艇采用充气囊结构作为飞行器的升力来源,充气囊一般充有比空气目的小的氢气或氦气。
旋翼无人飞行器,其配备有多个朝正上方安装的螺旋桨,由螺旋桨的动力系统产生向下的气流,并对飞行器产生升力。
扑翼无人飞行器是基于仿生学原理,配合活动机翼能否模拟飞鸟的翅膀上下扑动的动作而产生升力和向前的推力。
伞翼无人飞行器采用伞型机翼作为飞行器升力的主要来源。
1.2无人机的分类与管理在中国无人机驾驶航空器体系中,按照无人机的基本起飞重量指标可以分为四个等级1. 微型无人机,空机质量小于等于7千克2. 轻型无人机,空机质量大于7千克,但小于等于116千克,并且全马力飞行中,矫正空速度100公里/小时,升限小鱼3000米3. 小型无人机,空机质量小于等于5700千克,除微型及小型无人机以外的其他无人机4. 大型无人机,空机质量大于5700千克的无人机中国的空域目前归属于军队管理,民用航空领域则由民航总局向军队申请划分空域及航道。
民航总局针对私人飞行器的管理专设“中国航空器拥有者及驾驶员协会AircraftOwners and Pilots Association Of China - AOPA”,中国民航领域对飞行器主要管理分为三个层次等级进行管理。
[键入文字]V1.1版翎航智能科技工作室培训教材 多旋翼无人机知识手册前言随着多旋翼无人机的应用日趋广泛,多旋翼无人机的入门门槛越来越低,“到手飞”、个人航拍机等对操作人员的要求几乎是零,对毫无基本常识和经验的人来说也可以操作。
但这些都为人身和财产安全埋下了巨大的隐患,出于以上考虑,本教材阐述了多旋翼无人机的基本原理、总结了飞行过程中的注意事项、操作方法、以及如何规避风险。
这是一本适合飞行初学者的教材,旨在普及航空知识、和飞行常识等基本理论,根据经验提出在飞行中应该注意的问题和如何规避风险、应急处置等。
本教材的材料有些基于无人机方面的书籍,有些则基于航模飞行的经验,很多都是十分难得的第一手资料,因此可以作为飞行初学者的基础教程,也可以作为以拓宽知识面、开拓思路为主要目的的广大无人机爱好者的学习资料。
由于水平有限,时间仓促,书中疏漏之处在所难免,敬请读者朋友批评指正,以使我们在再版时修订。
作者目录前言................................................................................................... - 2 - 目录................................................................................................... - 3 - 第一章绪论 ....................................................................................... - 4 - 第二章系统组成及原理.................................................................... - 7 - 第三章飞行器 ................................................................................. - 18 - 第四章操作方法实例...................................................................... - 26 - 第五章其他细节 ............................................................................. - 45 - 第六章多旋翼无人机的作用与意义 .............................................. - 53 - 第七章与多旋翼无人机有关的航空法规及航空气象 ................... - 54 - 总结................................................................................................... - 66 - 参考文献 ........................................................................................... - 66 -第一章绪论关于无人机系统的发展历史在任何一本讲无人机的书里都有介绍,在这里不再重复。
无人机多旋翼技术基础知识考核一、选择题1、下列关于伯努利定理适用条件错误的是()。
[单选题] *A、空气没有粘性,即空气为理想流体。
B、空气为可压缩流体√C、气流是连续、稳定的2、不属于自动控制系统组成的是()。
[单选题] *A、控制器B、被控制对象C、螺旋桨√3.下列哪些是正确的()。
[单选题] *A.牛顿第三运动定律表明,要获得给定加速度所施加的力的大小取决于无人机的质量。
B.牛顿第二运动定律表明作用力和反作用力是大小相等方向相反的。
C.如果一个物体处于平衡状态,那么它就有保持这种平衡状态的趋势。
√4、气体的伯努利定理是哪个定律在空气流动过程中的应用()。
[单选题] *A.能量守衡定律√B.牛顿第一定律C.质量守衡定律5、流体在管道中稳定低速流动时,如果管道由粗变细,则流体的流速()。
[单选题] *A.增大√B.减小C.保持不变。
6、伯努利方程的使用条件是()。
[单选题] *A.只要是理想的不可压缩流体B.只要是理想的与外界无能量交换的流体C.必须是理想的、不可压缩、且与外界无能量变换的流体√7、当空气在管道中流动时,由伯努利定理可知()。
[单选题] *A.凡是流速大的地方,压强就大B.凡是流速小的地方,压强就小C.凡是流速大的地方,压强就小√8、流体的伯努利定理()。
[单选题] *A.适用于不可压缩的理想流体√B.适用于粘性的理想流体C.适用于不可压缩的粘性流体9、伯努利方程适用于()。
[单选题] *A.低速气流√B.高速气流C.适用于各种速度的气流10、最前与最后两个旋翼轴的连线与机体前进方向一致的叫()型。
[单选题] *A、I型√B、O型C、X型11、最前与最后两个旋翼轴的连线与机体前进方向不一致的叫()型。
[单选题] *A、I型B、O型C、X型√12、下列属于共轴发动机优点的是()。
[单选题] *A、效率高B、航时长C、不增大体积的情况下,提高无人机的动力√13、最早的开源自驾仪()。
2022年无人机驾驶考试理论知识模拟试题9姓名年级学号题型选择题填空题解答题判断题计算题附加题总分得分评卷人得分一、单项选择题1.请选择出哪一个功能选项,在手动遥控飞行时,可以改变各通道的操作灵敏度?()A.微调比例B.行程比例√C.通道速度2.用于起降的遥控器中THR、ELE通道分别控制多旋翼无人机的什么运动?()A.THR(上升、下降)ELE(前后、俯仰)√B.THR(前后、俯仰)ELE(上升、下降)C.THR(上升、前后)ELE(下降、俯仰)3.用于起降的遥控器中AIL、RUD通道分别控制多旋翼无人机的什么运动?()A.AIL(左、右移动)RUD(左、右水平旋转)√B.AIL(左、右水平旋转)RUD(左、右移动)C.AIL(前、后移动)RUD(上、下移动)4.用于起降的遥控器菜单中FAIL SAFE是什么功能设定?()A.模式转换B.模型选择C.失控保护√5.遥控器菜单中FAIL SAFE代表什么意思?()A.失控保护√B.通道反向C.飞行模式切换6.遥控器中SUB TRIM代表什么意思?()A.舵量微调B.中立微调√C.油门微调7.遥控器设置菜单中REV是设置什么的?()A.通道行程B.通道反向√C.失控保护8.ELE通道指的是什么?()A.升降舵√B.方向舵C.副翼9.当遥控器方向舵向左打,飞机顺时针旋转,遥控器应该在那个菜单进行设置?()A.EndpointB.Reverse √C.SUB—TRIM10.设置遥控器某一开关为飞行模式切换,主要在哪个功能菜单实践?()A.End pointB.Function √C.Condition11.遥控器的模型添加,删除菜单是什么?()A.MODEL SEL √B.MODEL TYPEC.End point12.遥控器中①升降舵②副翼③方向舵④油门控制通道的英文简称分别正确的是?()A.ELE、AIL、RUD、THR √B.RUD、AIL、ELE、THRC.ELE、THR、RUD、AIL13.关于无人机GPS天线与遥控接收机天线的说法错误的是()。
多旋翼无人机教案一、教学目标1. 了解多旋翼无人机的定义、分类和应用领域。
2. 掌握多旋翼无人机的基本组成和原理。
3. 学会多旋翼无人机的基本操作和飞行技巧。
4. 培养学生的创新意识和团队合作能力。
二、教学内容1. 多旋翼无人机的定义和分类2. 多旋翼无人机的基本组成3. 多旋翼无人机的原理和飞行原理4. 多旋翼无人机的操作方法和飞行技巧5. 多旋翼无人机的应用领域三、教学方法1. 讲授法:讲解多旋翼无人机的定义、分类、基本组成、原理、操作方法和应用领域。
2. 演示法:展示多旋翼无人机的实际飞行和操作过程。
3. 实践法:学生分组进行多旋翼无人机的实际操作和飞行练习。
4. 小组讨论法:学生分组讨论多旋翼无人机的创新应用和团队合作。
四、教学准备1. 教室内安装多媒体设备,用于展示图片和视频。
2. 准备多旋翼无人机模型或实物,用于演示和操作练习。
3. 准备相关教学资料和教材,用于学生学习和参考。
五、教学过程1. 导入:通过展示多旋翼无人机的实际飞行视频,引发学生的好奇心和兴趣。
2. 讲解:讲解多旋翼无人机的定义、分类、基本组成、原理、操作方法和应用领域。
3. 演示:展示多旋翼无人机的实际飞行和操作过程,让学生直观地了解其工作原理和操作方法。
4. 实践:学生分组进行多旋翼无人机的实际操作和飞行练习,巩固所学知识和技巧。
5. 讨论:学生分组讨论多旋翼无人机的创新应用和团队合作,激发学生的创新思维和团队合作能力。
6. 总结:对本次教学内容进行总结,强调多旋翼无人机的重要性和应用前景。
7. 作业:布置相关作业,让学生进一步巩固所学知识和技能。
六、教学评估1. 课堂问答:通过提问的方式检查学生对多旋翼无人机基本知识的掌握。
2. 操作练习:观察学生在实际操作多旋翼无人机时的表现,评估其操作技能。
3. 小组讨论报告:评估学生在小组讨论中的参与程度以及提出的创新应用方案。
4. 作业完成情况:检查学生作业的完成质量,评估其对课堂内容的理解和应用能力。
简述多旋翼无人机的飞行原理多旋翼无人机是一种利用多个电动螺旋桨产生升力和控制飞行姿态的飞行器。
其飞行原理主要涉及到气动学、动力学和控制理论等方面。
一、气动学原理1. 空气动力学基础空气是一种流体,当物体在空气中运动时,会受到空气的阻力和升力的作用。
升力是垂直于流体运动方向的力,它是由于物体表面上方的流体速度比下方快而产生的。
根据伯努利定律,速度越快的流体压强越低,因此在物体表面上方形成了一个低压区域,从而产生了升力。
2. 旋翼产生升力原理多旋翼无人机利用电动螺旋桨产生升力。
螺旋桨是一种叶片形状呈扁平椭圆形的转子,在转动时会将周围空气向下推送,从而产生反作用力使得无人机获得向上的升力。
同时,螺旋桨还可以通过改变叶片角度来调节升降速度。
3. 旋翼产生的气流对姿态控制的影响旋翼产生的气流会对无人机的姿态控制产生影响。
例如,当无人机向前飞行时,前方螺旋桨产生的气流会使得无人机头部上仰;而后方螺旋桨产生的气流则会使得无人机头部下俯。
因此,通过调节各个螺旋桨的转速和叶片角度来实现姿态控制。
二、动力学原理1. 动力学基础动力学是研究物体运动状态和运动规律的学科。
在多旋翼无人机中,电动螺旋桨提供了推力,从而使得无人机具有向上飞行的能力。
2. 电动螺旋桨推力计算电动螺旋桨推力与其转速和叶片角度有关。
一般来说,推力与转速成正比,与叶片角度成平方关系。
因此,在设计多旋翼无人机时需要根据所需升降速度和搭载重量等因素来确定电动螺旋桨数量、大小和转速等参数。
三、控制理论原理1. 控制理论基础控制理论是研究如何使系统达到期望状态的学科。
在多旋翼无人机中,通过调节各个螺旋桨的转速和叶片角度来实现姿态控制和飞行控制。
2. 姿态控制姿态控制是指调节无人机的姿态,使其保持稳定飞行。
一般来说,可以通过加速度计、陀螺仪和罗盘等传感器来获取无人机的姿态信息,然后通过PID控制器等算法来调节螺旋桨转速和叶片角度。
3. 飞行控制飞行控制是指调节无人机的飞行状态,包括升降、前进、后退、左右平移等动作。
哈尔滨四通技工学校第三教学站延寿农民工综合培训学校多旋翼无人机操作教案二0一七春季生遇险自动返航/一键返航、键盘/自定义摇杆飞行控制随点随行功能、全自主起飞/降落、自定义航点、种预设航线模板、3种航点转弯模式可选、自定义舵机通道控制、批量航线动作任务设置、实时飞行航线编辑F通道控制器、相对坐标编辑器、摄影测量工具包、仿真飞行模拟、飞行任务导入/导出。
课程后记课题第三章模拟训练教学目标1、常用模拟器的使用2、凤凰PHOENIX的正确使用教学重点模拟器的实际操作教材分析教材针对模拟器的使用和安装做了详细的解读教学方法讲授法授课类型新课课时四课时课程内容一、组织教学二、课前提问三、导入新课四、教学内容:1、常用模拟器介绍,常用模拟器主要有RealFlight 、Reflex XTR、Aerofly、凤凰Phoenix等。
2、RealFlight是目前普及率最高的一款模拟飞行软件,它具有拟真度高、功能齐全、画面逼真等优点,最新版本为RealFlight Generation7。
3、Reflex XTR 是老牌的德国模拟软件,适合直机的模拟练习,附带精选的26个飞行场景,一百多架各个厂家的直升机,一百多架各个厂家的固定翼,60部飞行录像。
4、AEROFLY是一款德国的模拟软件,象真度较高,适合中高级训练者使用,但价格昂贵,对电脑硬件要求较高。
5、凤凰模拟器是一款受欢迎的国产模拟器软件,效果逼真,场景迷人。
6、模拟器软件安装,以RealFlight7.0为例,模拟器软件的安装方法如下:(1)打开光盘根目录下setup.exe文件(有些情况光盘会自动运行)。
(2)点击Run setup.exe按钮,出现;点击必不可少。
2、以Phantom2为例,具体安装调试步骤如下:(1)H3-3D是开发的一款优秀云台,可广泛应用于休闲娱乐、航拍等航模运动中。
它在机械结构上内部走线避免线材缠绕,内置独立惯性测量单元(Inertial Measurement Unit, IMU)精确控制云台姿态,集成云台专用伺服驱动模块等。