多旋翼无人机技术基础课件2
- 格式:pptx
- 大小:1.53 MB
- 文档页数:31
多旋翼植保无人机工作原理
多旋翼植保无人机是由多组动力系统组成的飞行平台,常见的有四旋翼、八旋翼、十六旋翼等,甚至由更多旋翼组成。
电动多旋翼无人机是由无刷电机驱动螺旋桨组成单组旋翼动力系统,由惯导系统、飞控系统、导航系统、电子调速器组成控制驱动部分。
多旋翼植保无人机飞行中前进、后退、横移、转向、升高、降低主要是依靠调整桨叶的转速实施各种动作,特点是相邻的两个桨叶旋转方向是相反的,所以它们之间的风场是有相互干扰的,也会造成一定的风场紊乱。
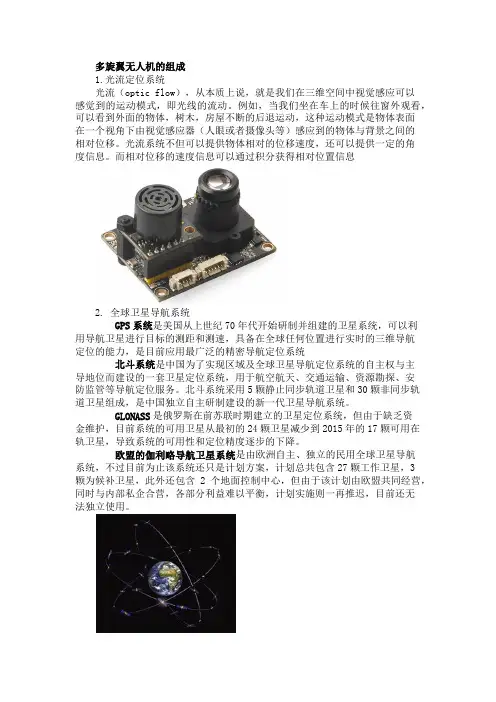
多旋翼无人机的组成1.光流定位系统光流(optic flow),从本质上说,就是我们在三维空间中视觉感应可以感觉到的运动模式,即光线的流动。
例如,当我们坐在车上的时候往窗外观看,可以看到外面的物体,树木,房屋不断的后退运动,这种运动模式是物体表面在一个视角下由视觉感应器(人眼或者摄像头等)感应到的物体与背景之间的相对位移。
光流系统不但可以提供物体相对的位移速度,还可以提供一定的角度信息。
而相对位移的速度信息可以通过积分获得相对位置信息2. 全球卫星导航系统GPS系统是美国从上世纪70年代开始研制并组建的卫星系统,可以利用导航卫星进行目标的测距和测速,具备在全球任何位置进行实时的三维导航定位的能力,是目前应用最广泛的精密导航定位系统北斗系统是中国为了实现区域及全球卫星导航定位系统的自主权与主导地位而建设的一套卫星定位系统,用于航空航天、交通运输、资源勘探、安防监管等导航定位服务。
北斗系统采用5颗静止同步轨道卫星和30颗非同步轨道卫星组成,是中国独立自主研制建设的新一代卫星导航系统。
GLONASS是俄罗斯在前苏联时期建立的卫星定位系统,但由于缺乏资金维护,目前系统的可用卫星从最初的24颗卫星减少到2015年的17颗可用在轨卫星,导致系统的可用性和定位精度逐步的下降。
欧盟的伽利略导航卫星系统是由欧洲自主、独立的民用全球卫星导航系统,不过目前为止该系统还只是计划方案,计划总共包含27颗工作卫星,3颗为候补卫星,此外还包含2个地面控制中心,但由于该计划由欧盟共同经营,同时与内部私企合营,各部分利益难以平衡,计划实施则一再推迟,目前还无法独立使用。
3.高度计由于全球定位系统GNSS的缺陷,它的高度信息极为不准确,通常偏差达几十米甚至更大,无人机系统的高度测量需要额外的设备来辅助测量。
常用的高度传感器主要包含超声波传感器和气压高度传感器,此外还有激光高度计和微波雷达高度计等。
气压高度计的原理是地球上测量的大气压力在一定方位内是与相对海拔高度呈现对应关系的。