Boost变换器的CCM小信号传递函数
- 格式:pdf
- 大小:13.82 KB
- 文档页数:1

一、反激变换器小信号模型的推导 1.1 DCM1.1.1 DCM buck-boost 小信号模型的推导根据状态空间平均法推导DCM buck-boost 变换器小信号模型如下:+-v in (t)v o (t)一般开关网络图1 1理想Buck-Boost 变换器开关网络1231d d d ++= (1)首先,定义开关网络的端口变量1122,,,v i v i ,建立开关周期平均值1122,,,ssssT T T T v i v i 之间的关系:11()sg T g pk s s v t v i d T d T LL<>==(2)根据工作模态:113()()()0s s s L T g T T v t d v t d v t d <>=<>+<>+ (3)[]11()()()sss t T t T L T L s ttsssdi Lv t v d Ld i t T i t T T d T τττ++<>===+-⎰⎰(4) DCM 下,()()0s i t T i t +==,所以()0s L T v t <>=,结合(3)式:11()()0s s g T T d v t d v t <>+<>= (5)21()(t)=-(t)()s sg T T v t d d v t <><> (6)根据工作模态:1123()()0()(()())()()s s s s T g T T g T v t d t d t v t v t d t v t <>=+<>-<>+<>(7) 消去上式的2d 和3d 得:1()()s s T g T v t v t <>=<> (8)根据工作模态:2123()()(()())()0(())s s s s T g T T g T v t d t v t v t d t d v t <>=<>-<>++-<>(9)消去上式的2d 和3d 得:2()()s s T T v t v t <>=-<> (10)21111111()()()22ss s t T s T pk T tsd T i t i t d i v t T L+<>===<>⎰(11)于是输入端口的方程可表示为:111()()()ss T T e v t i t R d <><>= (12)1212()e sLR d d T =(13) 222111222212()()11()()22()()()ss s s s st T T T s T pk tsT e T v t v t d T i t i t d i T L v t R d v t +<><><>====<><>⎰(14)于是输出端口的输出功率可以表示为:21221()()()()s s s T T T e v t i t v t R d <><><>=(15)可见输出端口的输出功率等于输入端口的输入功率。
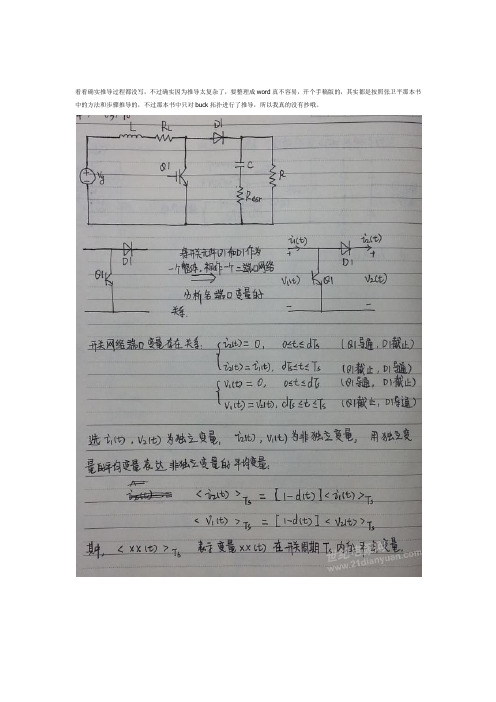
看看确实推导过程都没写,不过确实因为推导太复杂了,要整理成word真不容易,开个手稿版的,其实都是按照张卫平那本书中的方法和步骤推导的,不过那本书中只对buck拓扑进行了推导,所以我真的没有抄哦。
由上面的两个式子就可以推导出Gvd(s)和Gid(s),过程就略过了,直接给出结果:而Gvg(s)和Gig(s)的推导则令交流小信号等效电路中d(s)微变量为零,即涉及到的电压源短路,电流源开路,同样根据变压器两边电压电流的关系可列出两个式子基本上,CCM模式的boost主回路Gvd(s)均可以套用这个公式,大家可以结合自己接触过的项目用mathcad绘制这个函数的波特图,对于主回路的传递函数其实有四个式子,这个当然是最关键的,因为是占空比到输出电压的传递函数,关于这个函数主要注意点是:品质因数Qc、ESR造成的零点和右半平面零点,明天再做具体分析。
最后一张图②中的交流小信号等效电路,那个方法不懂,麻烦楼主再讲一下为什么d'(t) < Vo(t) >Ts就分离为那四部分了?我也是按照那个书上《开关变换器的建模与控制》的方法来推导的,我的理解是那种分离方法是针对小信号扰动进行,其实就相当于用d'(t) < Vo(t) >Ts对t求导数,<Vo(t)>Ts指的是开关周期内输出电压的平均值,自然就是Vo了,d`(t)在开关周期内的平均值自然就是D`,该式对时间求一阶导数的话就是那四个分式啦不晓得有没有解释清楚其实你可以看看那本书,我推传递函数的方法和步骤基本都是按照那本书的方法进行的d'(t)<Vo(t)>Ts不就是d(t)<Vo(t)>Ts对时间t 求导了么?,还是说这里的d' 表示的和D‘差不多的意思?其实应该是(1-d(t))<Vo(t)>Ts对时间求导,所以式子中有很多匪夷所思的负号那个d(t)<vo(t)>Ts是平均分量表达式,然后把平均分量分解成直流分量与交流小信号分量之和。

Boost变换器阻抗特性及其稳定性分析摘要:在以光伏发电单元为主微源的直流微电网中,光伏发电单元的阻抗特性及稳定性是研究的关键。
此处将Boost 变换器的输出阻抗作为研究对象,对连续导电模式(CCM)下的Boost 变换器进行小信号建模,得到变换器的开环输出阻抗。
对光伏发电单元采用电压下垂控制方式进行控制,分析了在该控制方式下变换器的闭环输出阻抗。
最后依据阻抗比判据,分析了线路中不同的寄生电容对光伏发电单元稳定性的影响,总结出规律性结论,对直流微电网进行稳定性分析,实验结果验证了上述理论分析的正确性。
关键词:微电网;下垂控制;稳定性分析1 引言为便于将分布式发电单元连接到电网上,出现了微电网的概念。
随着光伏电池成本降低,它已被作为主要的分布式发电单元而得到广泛应用。
由于光伏电池是直流源,因此在与电网及直流负载的连接中,直流微电网将成为最合适的构架。
为提高微电网冗余性和可靠性,将发电单元模块化已成为解决方案之一。
模块化后的发电单元的输入、输出阻抗将成为微电网的研究重点。
已有文献只是利用阻抗匹配准则对Buck 变换器在单电压闭环控制时的输出阻抗和稳定性进行分析,而未考虑发电单元的实际工作情况,故此处以光伏发电单元为背景,首先对光伏发电单元变换器进行小信号建模,求取其开环输出阻抗,其次引入电压下垂控制,分析了在该控制方式下微源变换器闭环输出阻抗,最后根据阻抗比禁止区判据对光伏发电单元的稳定性进行判断。
2 原理与设计图1 为所研究的直流微电网结构图,其微源包括光伏发电单元、蓄电池储能单元及负载。
其中光伏发电单元是直流微电网的主要发电单元,储能单元作为能量管理单元,在微电网孤岛运行模式下,调节微源与负载间的功率平衡。
当光伏发电。

一、反激变换器小信号模型的推导 1.1 DCM1.1.1 DCM buck-boost 小信号模型的推导根据状态空间平均法推导DCMbuck-boost 变换器小信号模型如下:+-v in (t)v o (t)一般开关网络图1 1理想Buck-Boost 变换器开关网络1231d d d ++=(1)首先,定义开关网络的端口变量1122,,,v i v i ,建立开关周期平均值1122,,,ssssT T T T v i v i 之间的关系:11()sg T g pk s s v t v i d T d T LL<>==(2)根据工作模态:113()()()0s s s L T g T T v t d v t d v t d <>=<>+<>+(3) []11()()()sss t T t T L T L s ttsssdi Lv t v d Ld i t T i t T T d T τττ++<>===+-⎰⎰(4) DCM 下,()()0s i t T i t +==,所以()0s L T v t <>=,结合(3)式:11()()0s s g T T d v t d v t <>+<>=(5) 21()(t)=-(t)()s sg T T v t d d v t <><>(6)根据工作模态:1123()()0()(()())()()s s s s T g T T g T v t d t d t v t v t d t v t <>=+<>-<>+<> (7) 消去上式的2d 和3d 得:1()()s s T g T v t v t <>=<>(8)根据工作模态:2123()()(()())()0(())s s s s T g T T g T v t d t v t v t d t d v t <>=<>-<>++-<>(9)消去上式的2d 和3d 得:2()()s s T T v t v t <>=-<>(10)21111111()()()22ss s t T s T pk T tsd T i t i t d i v t T L+<>===<>⎰(11)于是输入端口的方程可表示为:111()()()ss T T e v t i t R d <><>=(12)1212()e sLR d d T =(13) 222111222212()()11()()22()()()ss s s s st T T T s T pk tsT e T v t v t d T i t i t d i T L v t R d v t +<><><>====<><>⎰(14)于是输出端口的输出功率可以表示为:21221()()()()s s s T T T e v t i t v t R d <><><>=(15)可见输出端口的输出功率等于输入端口的输入功率。

Buckboost 变换器在电阻负载下的小信号传递函数普高(杭州)科技开发有限公司 张兴柱 博士用等效电源平均法,可获得Buckboost 变换器在电阻负载和CCM 下的两个等效子电路,分别如图1(b)和图1(c)所示。
其中图1(b )为稳态等效子电路,图1(c )为小信号等效子电路。
)(t v g )(tgV(ˆs vg )(ˆ][s dV V g o +)(ˆs oL图1: Buckboost 变换器和它的等效平均电路模型用图1(b )的稳态等效子电路,可以求出Buckboost 变换器在电阻负载和CCM 下的稳态关系。
因R R L <<,故在稳态关系中,可将其忽略。
求得的稳态关系为:Buckboost 变换器在稳态工作点上的小信号传递函数:222111)(o o zc a g vd s Q s s s D V s G ωωωω+++−′=)()(,2211)(o o zc vg s Q s s D Ds Gωωω+++′= 2221)1)(1()(oo zc zL L out s Q s s s D R s Z ωωωω++++′=)1()1()(1)(2222)(zp o o g ig in s s Q s D R D s G s Z ωωω+++′== 221311)1)(o o zp g id s Q s s R D V D s G ωωω+++′+=(,22211)(oo zpig s Q s s R D D s G ωωω+++′=22111)(o o zcii s Q s s D s G ωωω+++′=其中:D D −=′1,LC D o ′=ω,])([122C D R R R D L Q L c o ′++′=ω,DL R D a 2′=ω L R L zL =ω,C R C zc 1=ω,RC zp 1=ω,RCD zp +=11ω有两个小信号传递函数,即)()(s G g id ,)()(s G g ii 没有给出,有兴趣的读者,可以作为作业自己去推导。
峰值电流型控制Boost 等效功率级的小信号传递函数
普高(杭州)科技开发有限公司 张兴柱 博士
Boost 变换器在峰值电流型控制下的等效功率级小信号传递函数(CCM ): )
1)(1()1()1()(220n n p p zc a vc vc s Q s s s s G s G ωωωωω++++−′≈′ )1)(1()1)(1()(220
n n p p zc a vg vg s Q s s s s G s G ωωωωω++++′+′≈′ )
1()1()(0p zc out s s R s Z ωω++′≈′ 其中:10F D R R G i vc ′=′,120F F L RT G s vg =′,1
0F R R =′ 11F RC p =ω,L R D a 2′=ω,)5.0(1−′=D m Q c p π,C R c zc 1=ω,s
n T πω= a a D F ωω×′=′22,)]5.0(21[231−′+=c s m D L RT F ,]5.0[22−′+′′=D m RT D L D F c s
n e c S S m +=1,i g n R L
V S ×=
Boost 的峰值电流控制等效功率级小信号传递函数,与Buck 的差别是在控制电压到输出电压这个小信号传递函数中增加了一个右半平面零点,其它的特性很类似,但由于其极点数少了一阶,所以相比于电压型控制而言,它的补偿电路也是比较容易设计的。
1。
Boost变换器的环路补偿设计张正鸽【摘要】在DC-DC变换器的设计中,为了使得整个电路有一个更好的动态性能和静态性能,需要对整个控制环路进行补偿设计.但是,目前这种环路补偿的参数基本上都是通过实验的方法获得而没有进行定量的计算.本次设计以Boost变换器为例,采用波特图法对工作在CCM模式Boost变换器进行稳定性分析,通过定量计算得出动态补偿的参数,使其存在足够的相位裕量来保证稳定工作.最后通过Matlab工具对补偿后的Boost变换器绘制Bode图,验证补偿网络设计的正确性.【期刊名称】《电气开关》【年(卷),期】2018(056)004【总页数】3页(P26-28)【关键词】Boost变换器;环路设计;波特图法;Matlab仿真【作者】张正鸽【作者单位】广西大学电气工程学院,广西南宁 530004【正文语种】中文【中图分类】TN6241 引言一直以来,开关电源中环路的补偿和计算都是一个难点问题,也是工程应用中需要重点关注的部分。
在开关电源的设计中需要使电源拥有一个良好的静态指标和动态指标,这就要求在人们除了对主电路进行精心计算还需要一个良好的反馈控制系统,而补偿网络直接影响着反馈回路的性能因此补偿回路的设计非常重要。
由于在开关变换器中电感的等效串联电阻和输出滤波电容的等效串联电阻ESR会给变换器引入一个右半平面的零点,从而对整个环路的设计带来影响,因此分析这两个电阻对环路所带来的影响有着重要的研究意义[1-2]。
本次设计是以传统的Boost变换器为例,来研究非线性器件中的等效串联电阻对变换器环路所带来的影响,并应用小信号分析法建立模型,最后利用仿真分析来验算系统的合理性[3]。
在开环增益为1时,系统的总开环相位延迟必须小于360°。
在截止频率出开环相位延迟小于360°的角度称为相位裕量。
为使系统在最恶劣情况下仍能稳定,要求系统至少有35°到45°的相位裕量。