捷联惯导系统陀螺安装误差的精确标定方法
- 格式:pdf
- 大小:190.80 KB
- 文档页数:3
捷联惯导与组合导航系统高精度初始对准技术研究捷联惯导与组合导航系统高精度初始对准技术研究引言捷联惯导与组合导航系统是一种集捷联惯导和其他导航传感器(如GPS、气压计、陀螺仪等)的优势于一体的导航系统,具有在惯导滞后情况下实现导航信息快速、准确更新的优势。
为了确保导航精度和可靠性,捷联惯导与组合导航系统的初始对准是不可或缺的关键技术之一。
本文将重点探讨捷联惯导与组合导航系统高精度初始对准技术的研究。
一、捷联惯导与组合导航系统概述捷联惯导与组合导航系统是一种通过融合多种导航传感器测量数据来计算导航解的导航系统。
其中,捷联惯导通过惯性导航算法利用加速度计和陀螺仪提供的姿态、速度和位移信息进行导航计算,而组合导航则通过融合GPS和其它传感器的信息来修正惯导的误差,提供更准确的导航结果。
二、初始对准技术的研究现状初始对准技术在捷联惯导与组合导航系统中起到了决定性的作用,对其精度和可靠性具有重大影响。
目前,针对初始对准技术的研究主要集中在以下几个方面:1. 惯性传感器标定:惯导系统的精度和准确性直接依赖于惯性传感器的性能。
因此,对于惯导系统而言,惯性传感器的标定至关重要。
传感器标定主要涉及惯性传感器的误差估计、参数校准和标定方法等。
2. 导航状态估计算法:捷联惯导与组合导航系统的核心是导航状态估计算法。
目前常用的算法包括扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)以及粒子滤波(PF)等。
这些算法通过融合多种传感器的信息,实现对导航状态的准确估计。
3. 高精度传感器融合:为了提高初始对准的精度和可靠性,可以考虑使用更高精度的传感器,如高精度的加速度计和陀螺仪。
此外,对于GPS系统而言,使用双频技术和高精度的差分GPS技术可以进一步提高导航精度。
三、捷联惯导与组合导航系统高精度初始对准技术研究在捷联惯导与组合导航系统高精度初始对准技术的研究中,可以采用以下方法来提高初始对准的精度和可靠性:1. 多目标标定方法:采用多目标标定方法来标定捷联惯导系统中的惯性传感器。
激光陀螺捷联惯导系统外场快速标定新方法贾继超;秦永元;张波;吴训忠【摘要】针对激光陀螺具有标度因数稳定、漂移误差变化小的特点,建立了适合激光陀螺捷联惯导系统的陀螺及加速度计组件简化误差参数模型,推导出了适合激光陀螺捷联惯导系统外场快速自标定的误差模型,设计了激光陀螺捷联惯导系统9位置系统级标定方法,并通过试验验证了该方法可快速准确的标定出加速度计组件的标度因数、安装误差、零偏及激光陀螺安装误差等15个主要参数,方法简单易行.【期刊名称】《中国惯性技术学报》【年(卷),期】2014(022)001【总页数】3页(P23-25)【关键词】激光陀螺捷联惯导系统;参数稳定性;系统级标定;误差参数辨识【作者】贾继超;秦永元;张波;吴训忠【作者单位】西北工业大学自动化学院,西安710072;航天第十六研究所,西安710100;西北工业大学自动化学院,西安710072;航天第十六研究所,西安710100;空军工程大学工程学院,西安710038【正文语种】中文【中图分类】U666.1通过系统级标定技术进行捷联惯性系统误差参数的快速估计与补偿,是解决参数性能保持期问题、提高系统精度的重要途径之一[1]。
文献[2-3]的系统级标定方法,结合姿态矩阵,静态下以加速度计比力测量值在当地水平地理坐标系下的投影为观测量,经过静止—转动—静止的标定过程,可以标定出陀螺、加速度计组件的标度因数、安装误差角及零偏等全部 24个主要参数。
文献[4]设计了一种多位置连续转动标定方案,通过测量每个位置静态导航状态下的速度误差,采用最小二乘法,全面辨识所有24个误差参数。
文献[5]基于激光陀螺捷联惯导系统参数稳定性统计分析,建立了适合激光陀螺捷联惯导系统外场自标定的加速度计组件误差参数模型。
以惯性组合转动后重新调平的水平姿态修正量以及静态下重力测量误差为观测量,不依赖外界方向姿态转角等基准信息,实现了加速度计组件主要误差参数在外场条件下的自标定,并给出了标定参数的修正方法。
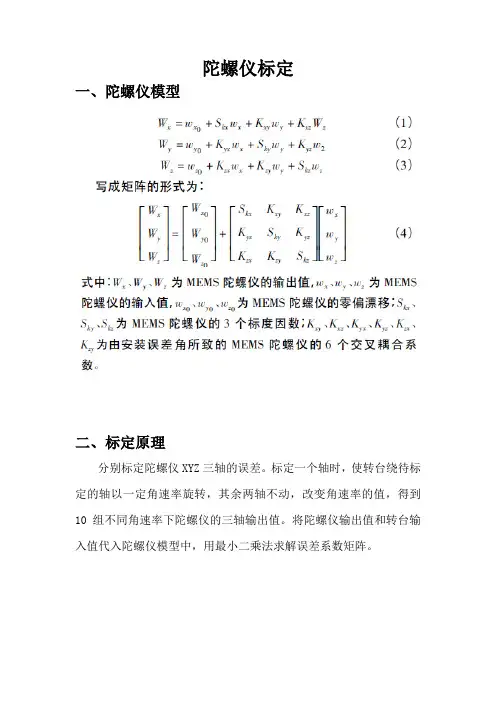
陀螺仪标定一、陀螺仪模型二、标定原理分别标定陀螺仪XYZ三轴的误差。
标定一个轴时,使转台绕待标定的轴以一定角速率旋转,其余两轴不动,改变角速率的值,得到10组不同角速率下陀螺仪的三轴输出值。
将陀螺仪输出值和转台输入值代入陀螺仪模型中,用最小二乘法求解误差系数矩阵。
三、标定过程将惯性器件安装在三轴转台内环框架上,使陀螺X、Y、Z轴分别与三轴转台的内框、中框、外框同轴。
X轴标定:1、设置转台运动方式为速率方式,先将转台归0,接通电源,预热10min。
2、转台内框转动轴按照表格中第一个速率正转,待转速稳定后同时采集陀螺仪3个敏感轴角速率输出值,取采样频率为100Hz,每种速率模式采样1min。
采集完成后转台停转。
然后转台反转,再采集陀螺仪输出值,采集完成后停转。
10种速率全部采集完后,将转台归0。
Y轴标定:转台中框转动轴按照表格中第一个速率正转,待转速稳定后同时采集陀螺仪3个敏感轴角速率输出值,取采样频率为100Hz,每种速率模式采样1min。
采集完成后转台停转。
然后转台反转,再采集陀螺仪输出值,采集完成后停转。
10种速率全部采集完后,将转台归0。
表2. Y轴标定时3个敏感轴输出Z轴标定:转台外框转动轴按照表格中第一个速率正转,待转速稳定后同时采集陀螺仪3个敏感轴角速率输出值,取采样频率为100Hz,每种速率模式采样1min。
采集完成后转台停转。
然后转台反转,再采集陀螺仪输出值,采集完成后停转。
10种速率全部采集完后,将转台归0。
表3. Z轴标定时3个敏感轴输出四、数据处理忽略转台的起始和停止阶段,求得在某输入角速率下陀螺仪输出的平均值作为该输入角速率下的陀螺输出值填入表1、2、3中。
以X轴为例,将表1中10种模式下的转台输入值和陀螺仪输出值带入数学模型式(1)中,分别得到关于K xx,K xy,K xz,W x0的10个方程,写成矩阵形式如下[W x1 W x2⋮W x10]=[p1q1r11p2q2r21⋮⋮⋮⋮p10q10 r101]·[k xxk xyk xzw x0]其中W x为陀螺仪X轴10种速率模式下的输出值,p、q、r 为转台输入值。
无陀螺捷联惯导系统的安装误差辨识方法
无陀螺捷联惯导系统的安装误差辨识方法
根据无陀螺捷联惯导系统(GFSINS)的工作原理,推导了理想条件下和有加速度计安装误差条件下的角速度解算方程;推导了加速度计的安装位置误差所产生的加速度计的输出误差;在静基座条件下,通过旋转惯性测量单元坐标轴的方法改变其放置位置,建立了加速度计安装位置误差的辨识公式;数字仿真结果表明.所采用的加速度计安装误差的辨识方法有效,对辨识得到的安装误差进行补偿可以显著地提高角速度的解算精度.
作者:吴俊伟李绵伟王小旭金春竹WU Junwei LI Mianwei WANG Xiaoxu JIN Chunzhu 作者单位:哈尔滨工程大学,自动化学院,黑龙江,哈尔滨,150001 刊名:测试技术学报ISTIC英文刊名:JOURNAL OF TEST AND MEASUREMENT TECHNOLOGY 年,卷(期):2008 22(5) 分类号:V249.32 关键词:无陀螺捷联惯导系统惯性单元安装误差加速度计参数辨识。
第35卷第6期 光电工程V ol.35, No.6 2008年6月 Opto-Electronic Engineering June, 2008文章编号:1003-501X(2008)06-0048-06光纤陀螺组件误差标定ARLS算法曹华,刘建业,祝燕华,赖际舟( 南京航空航天大学导航研究中心,南京 210016 )摘要:捷联惯性导航系统误差参数标定的准确程度对于系统的导航和定位精度具有重要影响。
针对常规速率标定法不能辩识陀螺零偏,未充分预热时光纤陀螺的误差标定易受温度变化影响这两个问题,提出了一种用于光纤陀螺捷联惯性导航系统的新标定算法——自适应递推最小二乘法(ARLS)。
在建立光纤陀螺误差及其补偿模型的基础上,通过大量温度实验研究了自适应遗忘因子的求取方法,详细推导了ARLS算法及其实现思路。
最后通过算法仿真和速率试验证明了在器件特性不稳定条件下,ARLS算法能有效辨识陀螺的误差参数及减小温度变化对光纤陀螺误差标定的影响。
关键词:光纤陀螺;静态标定;误差补偿;自适应遗忘因子;递推最小二乘法中图分类号:U666.1 文献标志码:AARLS Calibration Method of the FOG SINSCAO Hua,LIU Jian-ye,ZHU Yan-hua,LAI Ji-zhou( Navigation Research Center, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China ) Abstract: The parameter error of inertial navigation system has important effect on the precision of navigation system.Conventional method of angular velocity calibration can’t identify the bias and the error calibration of the Fiber Optic Gyroscope (FOG) under the insufficient preheat condition is affected by temperature fluctuation. To solve the two problems, a new calibration algorithm for FOG Strapdown Inertial Navigation System (SINS) was brought forward, called Adaptive Recursive Least Square (ARLS). After analyzing the FOG Inertial Measurement Unit (IMU) errors and their compensation model, the method of adaptive forgetting factor was studied through large temperature tests and implementation procedure was given in detail. Finally, the validity of ARLS that can identify the error coefficient of FOG, and restrain the effect of temperature fluctuation in the condition of unstable device characteristics, is proved by algorithm emulation and angular velocity test.Key words: FOG; static calibration; error compensation; adaptive forgetting factor; RLS algorithm1 引 言在捷联惯性导航系统(SINS)中,惯性测量单元(IMU)的测量误差是影响惯性导航系统精度的一个重要因素[1]。
IMU标定方法和标定流程受各种因素影响,微机械IMU放五一定时间后,其误差参数和惯性元件参数会发生变化,不能满足导航、制导的精度要求,因此必须定期对其相应参数重新进行标定。
捷联惯测组合(SIMU)技术成熟、精度适中、可靠性高、成本低,被广泛应用于航空、航天、航海等领域,对其标定方法的研究是惯性技术领域的重要内容。
通常通过对捷联惯测组合的标定,分离出其误差系数,并用捷联惯测组合的测量模型对其输出进行补偿,提高惯性导航的精度。
因此,误差系数的标定精度严重影响着惯性导航的精度。
近年来研究出了许多种捷联惯测组合的标定方法,但其中大多数都需要进行位置标定和速率标定。
有的文献提出了一种高精度的“24位置+速率”标定方法,还有一种利用外部信息标定陀螺参数的方法,一级一种基于多元回归的捷联惯测组合标定方法.传统的“位置+速率”标定方法需要精确的北向基准和很高的定位精度或调平精度.这些要求要靠高精度的寻北仪器和水平测量仪器才能实现.传统标定方法所需要的标定时间长,而捷联惯测组合误差系数的特性与通电时间相关,因此通电时间过长所标定出的结果与导弹实际飞行时的误差系数的残差较大,必然带来较大的导航误差.而且过长的标定时间也影响着惯测组合生产厂家和用户的工作效率.结合参考文献内容我们采用一种基于单轴速率转台的捷联惯测组合的标定方法,研究在无北向基准及精确调平的条件下,快速标定出捷联惯测组合全部误差系数的方法。
1.基于单轴速率转台的标定原理基于单轴速率转台的捷联惯测组合标定方法的基本原理为:将捷联惯测组合放置在单轴速率转台上,在任意位置惯测组合的3个轴分别向上、向下及转动180度后,各进行一次静态数据采集。
之后转台匀速旋转一圈。
重力加速度g、地球自转角速度w及转台匀速旋转一圈的时间为已知量,结合捷联惯测组合的测量模型,经过适当的数学变换,分离出捷联惯测组合的误差系数.2 。
误差系数的分离算法2。
1 捷联惯测组合的测量模型及姿态转换加速度通道的测量模型:其中Nax、Nay和Naz分别为3个加速度计单位时间内输出的脉冲数;Ax、Ay,Az分别为3个方向的视加速度;K0x、K0y和K0z分别为3个加速度计偏值;K1x、K1y和K1z分别为3个加速度计输出的脉冲当量;Kyx、Kzx、Kxy、Kzy、Kxz和Kyz为加速度计的安装误差系数。
基于速度阻尼的双轴旋转式激光陀螺捷联惯导标定方法王彬;翁海娜;汪湛清;张宇飞;胡小毛【摘要】惯性元件参数的长期稳定决定着惯导系统的精度,目前对于激光陀螺捷联惯导系统(RLG-SINS)主要是采用系统级旋转调制技术来实现高精度导航能力,同时系统级旋转也提高了初始对准精度以及惯性元件误差的可观测性。
针对激光陀螺惯导系统惯性元件误差项的特点,同时结合分立式标定与系统级标定各自的优势,设计了一种水平阻尼模式下的 Kalman 滤波方案,利用双轴旋转机构,通过观测导航位置误差来实现初始对准以及部分惯性元件误差参数的标定,可以有效地减小惯性元件逐次启动误差对导航精度的影响。
仿真结果表明,系泊状态零速度阻尼模式下工作4 h,可以标定出石英加速度计标度因数误差、零偏与激光陀螺零偏,共计9项误差参数。
加速度计零偏估计误差小于2%,陀螺零偏估计误差小于8%,误差估计精度满足高精度惯性导航要求,该方法具备一定的工程实用性。
%The long-term stability of inertial element parameters determines the accuracy of inertial naviga-tion systems, and the present laser gyroscope strapdown inertial navigation system(RLG-SINS) is mainly by means of systematic modulation techniques to achieve the capability of high accuracy navigation or improve the accuracy of initial alignment and the observability of inertial component errors. According to the inertial component error characteristics of RLG-SINS, and combining with the respective advantages of discrete calibration and systematic calibration, a Kalman filter scheme is designed in lever-damp mode to achieve the initial alignment and to calibrate parts of inertial component errors by observing navigation position errors and using two-axis indexing. This scheme caneffectively reduce the influence of ine rtial component’s each startup error on navigation accuracy. The simulation results show that the total nine error parameters (scale factor error and bias of the quartz accelerometer, laser gyroscope bias) can be estimated on mooring base during 4 h operation in zero-speed damping mode. The estimated error for accelerator bias is less than 2%, and the estimated error for gyroscope bias is less than 8%, meeting the demands of high accuracy inertial navigation, and showing that this method has certain engineering practicability.【期刊名称】《中国惯性技术学报》【年(卷),期】2014(000)004【总页数】5页(P421-425)【关键词】速度阻尼;双轴旋转调制;系统级标定;系泊状态【作者】王彬;翁海娜;汪湛清;张宇飞;胡小毛【作者单位】天津大学机械工程学院,天津 300072;天津航海仪器研究所,天津300131;北京理工大学自动化学院,北京 100081;天津航海仪器研究所,天津300131;天津航海仪器研究所,天津 300131【正文语种】中文【中图分类】U666.1惯性导航系统可以不间断提供载体全部的运动参量(姿态、速度、位置等),对外既不吸收能量也不辐射能量,同时具有较强的隐蔽性、抗干扰能力以及较高的信息输出精度。