光纤陀螺的误差分析
- 格式:pdf
- 大小:629.83 KB
- 文档页数:10
摘要对于自主移动机器人,自我确定在环境r}】的位置是一项基本能力。
在未知环境中,惯性定位方式是移动机器人定位系统中一种完全自主的定位方式并且是不可替代的,然而由于惯性定位器件的输出漂移所带来的累积误差是实现有效定位的最大障碍,本文的主要内容是针对光纤陀螺仪的误差,误差对定位的影响以及如何抑制误差进行了分析和研究。
本文首先对基于多传感器信息融合的移动机器人定位系统平台进行了简介,阐述了基于航迹推算的惯性定位原理,分析了光纤陀螺仪的漂移误差对定位的影响。
目前,对惯性定位器件所带来的累积误差,基于卡尔曼滤波的组合导航是实现有效校正的最佳方式,其中各传感器误差模型的获取是实现误差校正的前提条件。
本文在了解光纤陀螺仪的工作原理、误差产生机理及其分布的情况下,利用E.corel000RD光纤陀螺仪的漂移测量数据,结合目前各种光纤陀螺仪漂移分析的方法,在此基础上采用时问序列分析方法进行研究和分析,并且得出了一系列的结论。
(1)光纤陀螺仪漂移是一个非平稳随机时间序列,它包含随机漂移和常值漂移,但是在温度相对稳定的情况下,其漂移近似为平稳时间序列;(2)由于光纤陀螺仪漂移受环境温度的影响,误差模型具有时变性,其中,常值漂移量与温度是一种非线性关系;(3)通过A{{!I{A(AutoRegressive啪ovingAveragemodel)模型对漂移测量数据进行模型拟合,计算得出AR(1)为光纤陀螺仪漂移输出的适用模型;(4)最后,结合移动机器人的工作特性,根据光纤陀螺仪漂移误差模型具有时变特性,提出了基于递推最小二乘的在线模型参数估计和校正算法,以提高系统的实用性,并且通过模型的一步预测曲线与样本序列的拟合程度证实所求模型的有效性。
光纤陀螺仪误差模型的获得为以后传感器的观测数据滤波处理、基于多传感器信息融合定位系统的实现以及传感器的实时故障诊断提供了必要的条件。
关键词多传感器信息融合,移动机器人定位,光纤陀螺仪漂移,ARMA,在线估计ABSTRACTForautomobilerobot,self-localizationjsamndamenCalabili哆lnertiaNavigationSystemisasel■10calizationwayandisnotabletosubstituteinthepositioningsystemofthemobilerobotinunkno、vnenvironment.However,theerrorcausedbythed—Roftheineniacomponentsistheneckofbottletoaccomplishpositioning.ItisthemaintaskforthisthesistoanalYze柚dtomodeltheFOG’sdnft,theinfluenceofthedriRtopositioningandhowtorestraintthedrift.Thepositioningsystembasedonmulti—sensorinfornlation如sionhasbeeninn.oducedinthisthesis.Theprincipleofdeadreckoningsystemhasbeendescribed.Thepositioningerrorcausedbythedriftoftheinertiacomponentshasbeenanalyzed.TheKalman矗IterisanoptimalwaytorestrainttheerrorofInertiaNaVigationSystem,buildingtheerrormodeljstheDreliminaryconditiontorealize.AfterintroducingtheFOG’sprincipleandthecauseoftheFOG’sd—ft,thetimeseriesisadoptedtoanalyzethedrindataofE.corel000RDFOGanditisconcludedthat(1)theFoG’sdriRisanon.stationarvtimeseriesandincludesrandomcomponentandconstalltcomponent,butitisastationarytimeseriesasthetemperatureisstable;(2)theerrormodeloflheFOG’sdriftistime-VaryingandtheconstantcomponentoftheFOG’sdriRhasareIationofnonlineartothete埘Iperature;(3)theerrormodelofmeFOG’sdriftisexpressedasAR(1);(4>at1ast,combjningwiththecharactcroftherobotworking,RLSisadoptedtoadjustthemodelpammeteronline,theone—step·predicted—ou印utisusedtoconfimlheavailabilitvofthemodel.Itisanecessarycond{tiontoconstructtheFOG’se啪rmodelforestimatinganddiagnosingthef’aultofsensorsandachievingpositioningsystembasedonmulti·sensorinfo珊ation缸sion.KEYWORDSmulti—sensorinfomation如sion,positioningofmobjlerobot,FiberopticalGyroscope’sdrin(FOG’sdrin),ARMA,onlineestimate!堕盔兰塑!兰些堡:!——~一一…一——』!堡第一章绪论1.1引言陀螺是我国一种古老的玩具。
光纤陀螺术语及测试方法光纤陀螺是一种利用光学原理来测量角速度和方向的仪器。
其优点包括精度高、响应速度快、稳定性好等,因此在惯性导航、航天航空、自动控制等领域得到了广泛的应用。
光纤陀螺的术语主要包括以下几个方面:1.动态误差:动态误差是指光纤陀螺在运动过程中由于各种因素导致的测量误差。
例如,由于光纤陀螺的光学元件和机械部件在运动时产生的振动、材料膨胀等原因,会导致测量结果的偏差。
2.静态误差:静态误差是指光纤陀螺在静止不动时由于各种因素导致的测量误差。
例如,由于光纤陀螺的温度变化、光学元件和机械部件的松动等原因,会导致测量结果的偏差。
3.小干扰误差:小干扰误差是指光纤陀螺在受到小幅度干扰时产生的测量误差。
例如,由于光纤陀螺的机械结构和光学元件的松动等原因,会导致测量结果的不稳定性。
4.归零误差:归零误差是指光纤陀螺在归零过程中产生的测量误差。
例如,由于光纤陀螺的光纤光路中存在的偏移、偏振和偏心等原因,会导致归零结果的不准确性。
5.偏置误差:偏置误差是指光纤陀螺在测量过程中产生的零点漂移。
光纤陀螺的偏置误差可能由于温度变化、机械部件磨损等原因引起。
除了以上术语之外,光纤陀螺的测试方法主要包括以下几种:1.静态测试:静态测试是指将光纤陀螺放置在静止的环境中,通过测量其输出信号来评估其静态误差。
常用的方法包括将光纤陀螺与参考陀螺或参考仪器进行比较,以确定其零点漂移等测量误差。
2.动态测试:动态测试是指将光纤陀螺安装在运动的平台上,通过测量其输出信号来评估其动态误差。
常用的方法包括将光纤陀螺与参考陀螺或参考仪器进行比较,以确定其响应速度、线性度等测量性能。
3.带宽测试:带宽测试是指通过改变输入信号的频率,测量光纤陀螺输出信号的变化,以确定其响应频率范围。
常用的方法包括使用正弦波信号作为输入信号,测量光纤陀螺输出信号的幅值和相位变化。
4.稳定性测试:稳定性测试是指通过长时间连续测量光纤陀螺输出信号的变化,以确定其稳定性和长期稳定性。
光纤陀螺温度效应误差及其补偿技术研究光纤陀螺温度效应误差及其补偿技术研究摘要:温度效应误差是目前制约光纤陀螺高精度应用的瓶颈之一。
文中分析了光纤陀螺温度效应的成因及影响机理,介绍了温度效应误差补偿技术的研究现状,重点阐述了一种基于误差建模的软件补偿方法。
该方法建立了以温度、温度变化率和温度梯度为变量的误差模型,使用温循实验数据进行模型参数拟合,通过DSP 技术在系统中实现了对温度效应误差的补偿。
仿真试验结果表明,使用该方法可以将某型光纤陀螺的温度效应误差降低约一个数量级。
关键词:光纤陀螺;温度效应误差;误差建模经过几十年发展,光纤陀螺加工工艺逐渐成熟,潜在优势日益显现,已经成为新一代惯性导航系统中的理想器件[1]。
目前,光纤陀螺面临着高精度的发展要求。
而温度效应在很大程度上增大了光纤陀螺的输出漂移,是制约其高精度工程应用的瓶颈。
文章通过对光纤陀螺温度效应误差成因与机理的分析,结合国内外温度误差补偿技术的研究现状,提出了一种基于误差建模的软件补偿方法。
仿真试验表明,该方法能有效抑制温度效应对光纤陀螺精度的影响。
1 光纤陀螺温度效应误差分析温度效应是光纤陀螺的重要误差源之一,主要是指温度条件变化导致光纤陀螺输出漂移的现象。
引发温度效应的热量来源主要有两个:一是工作时陀螺各个元器件的自身产热;二是外界温度环境的影响[2]。
光纤陀螺内部(核心器件是光纤环)的温度是这两个热源综合作用的结果。
开机后的一段时间内,光纤陀螺自身产热导致的升温效应较为显著,器件内部的温度持续上升,直至产生的热量与散失的热量基本相当,形成动态平衡。
之后,外部温度环境的影响占主导作用。
在实际的工作环境中,陀螺外部的温度环境始终在变化,陀螺内部很难形成稳定不变的温度场,温度效应误差始终存在。
光纤陀螺内部受温度影响的元器件较多,温度效应可以看成多种相关因素共同作用的结果[3]。
光纤陀螺系统由光路与电路两部分组成:光路部分包括光纤环、光源、Y波导、耦合器和光电探测器;电路部分包括光源驱动电路和信号处理电路[4]。

光纤陀螺方波调制误差的分析与抑制3金 靖33,潘 雄,宋凝芳,张春熹(北京航空航天大学仪器科学与光电工程学院,北京100083)摘要:基于光纤陀螺的调制2解调原理,讨论了调制方波的频率、相位、占空比和光纤环特征频率对方波调制误差的影响,推导出方波调制误差的数学模型。
测量光纤环特征频率、调制方波频率、相位及其温度系数,分析了温度变化对方波调制误差的影响。
提出了数字时域梳状滤波的解调方法,推导出消除方波调制误差的条件表达式。
实验结果显示,数字时域梳状滤波可以使方波调制误差引起的偏置漂移减小到0.3°/h以下。
关键词:光纤陀螺;调制误差;调制;解调;梳状滤波中图分类号:V241.5 文献标识码:A 文章编号:100520086(2008)0420430204A nalysis and supp ression of squ are w ave modu lation errors in F OGJ IN Jing33,PAN X iong,SONG Ning2fang,ZANG Chun2xi(School of Instrument Science and Opto2electronics Engineering,Beijing University of Aeronautics and Astronau2 tics,Beijing100083,China)Abstract:Based on the principle of square wave modulation and demodulation in fiber optic gyroscope(FOG),the effects of the square wave frequency,phase and duty cycle and the fiber coil eigenfrequency upon square wave modulation errors were discussed.The temperature coefficients of the fiber coil eigenfrequency and square wave frequency,duty cycle and phase were measured by using a lock2in amplifier.The bias drift of FOG due to the square wave modulation errors was analyzed at dif2 ferent temperatures.A digital time2domain comb filter was presented and a conditional expression was derived to eliminate the square wave m odulation errors steadily.The test results show that the bias drift,brought by square wave modulation er2 rors,is reduced to less than0.3°/h by applying digital time2domain comb filter in FOG.K ey w ords:fiber optic gyroscope(FOG);modulation errors;modulation;demodulation;comb filter1 引 言 光纤陀螺的方波调制误差是由调制方波不理想造成的,调制方波不理想主要指调制方波的频率、相位发生偏移以及调制方波畸变导致其不对称[1~4]。
光纤陀螺中的Shupe误差及八极绕环技术研究的开题报告题目:光纤陀螺中的Shupe误差及八极绕环技术研究的开题报告研究背景:随着社会的发展,人们对高精度导航和姿态控制系统的需求越来越大。
而光纤陀螺是一种重要的精密导航仪器,具有高精度、长寿命、快速响应等优点。
但是在实际应用中,光纤陀螺存在一些误差,其中Shupe误差是比较严重的一种,它会对光纤陀螺的精度和稳定性产生很大影响。
而对于光纤陀螺中的八极绕环技术,它可以有效地解决Shupe 误差问题,提高系统的精度和稳定性。
因此,对于Shupe误差和八极绕环技术的讨论和研究是非常有必要的。
研究目的:本研究的主要目的是探讨光纤陀螺中的Shupe误差机理,分析其对光纤陀螺系统的影响。
同时,本研究还将研究八极绕环技术的基本原理和实现方法,比较其与传统绕环方法的不同之处,并进行理论分析和实验验证。
研究内容:1. Shupe误差的机理分析。
2. 光纤陀螺中的八极绕环技术的基本原理和实现方法。
3. 对比分析八极绕环技术与传统绕环方法的不同之处。
4. 进行理论分析和实验验证,验证八极绕环技术的有效性。
研究方法:1. 文献研究法:对于Shupe误差和八极绕环技术的相关文献进行全面搜集和分析,深入了解其理论基础和实现方法。
2. 实验研究法:通过实验验证八极绕环技术的有效性,分析其对光纤陀螺系统精度和稳定性的影响。
3. 数学模型建立法:建立光纤陀螺系统的数学模型,探究Shupe误差的产生机理和八极绕环技术的原理。
4. 计算机仿真法:利用计算机仿真技术,对光纤陀螺系统进行仿真分析,以验证八极绕环技术的有效性。
研究意义:1. 深入了解光纤陀螺中的Shupe误差机理和八极绕环技术的基本原理和实现方法。
2. 提出有效的解决Shupe误差问题的方法,为光纤陀螺的研究和应用提供理论依据和技术支持。
3. 验证八极绕环技术的有效性,为光纤陀螺系统的精度和稳定性提高提供一种新的绕环方法。
4. 推动航天、军事、运输等领域高精度导航和姿态控制系统的发展。
0 引言陀螺仪是运用物体高速旋转时角动量很大,从而旋转轴会一直稳定指向一个方向的性质(即陀螺仪的定轴性),所制造出来的定向仪器。
上个世纪70年代开始,基于赛格尼克理论的光纤陀螺仪的提出,使得传统的机械式陀螺仪迅速隐没,现代光纤陀螺仪飞速发展。
到目前为止,由于光纤陀螺仪具有的耐冲击、抗加速度运动、结构简单、价格低廉、灵敏度和分辨率高等的优点,使其在很多领域已经完全取代了机械式陀螺仪,成为现代导航仪器中的重要器件。
作为一种精密仪器,误差的大小直接决定了其发展前景。
在实际系统中,光纤陀螺仪的每个原件都是噪声源,而且存在各种各样的寄生效应,引起陀螺仪输出漂移和标度因素不稳定,从而影响其性能。
本文基于光纤陀螺仪实际测量值,采用最小二乘原理,从数值角度拟合出零位、标度因素及误差。
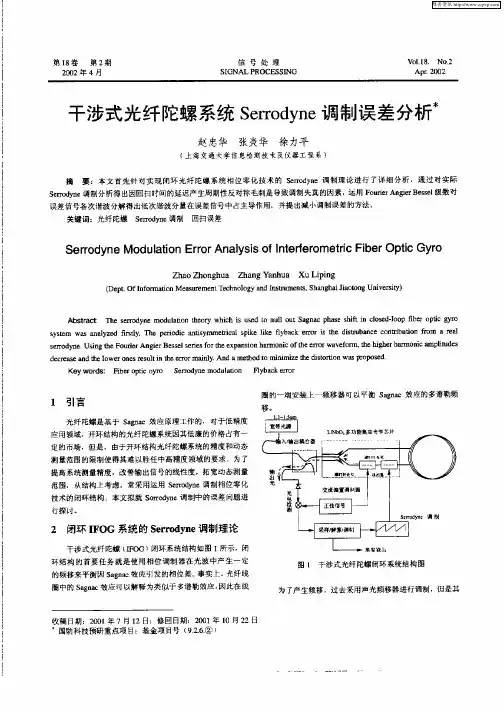
1 FOG 原理各种不同类型的光纤陀螺仪,其基本原理都是利用sagnac 效应,即:在任意几何形状的闭合光路中,从某一观察点发出的一对光波沿相反方向运行一周后又回到该观察点时,这对光波的相位(或经过的光程)将随该闭合环路相对于惯性空间的旋转情况而不同,其相位差(光程差)的大小与闭合光路的旋转角速率成正比。
利用sagnac 效应,通过对干涉光强信号的检测和解调,即可得到旋转角速率。
不妨以干涉式陀螺仪为例,如下图示,光源发出的光经分束器后分为两束,进入一半径为R 的单模光纤环中,分别沿顺时针方向、逆时针方向传输,最后同向回到分束器形成干涉。
当干涉仪以角速度旋转时,两束反向光束依然以光速C 传播,对于惯性参考系中的观测者来说,经过时间后,分束器已从点M 移动到了点N ,与干涉仪旋转方向一致的光束所经过的路径要长于相应的反向传播的光束,两者路径差为:式中,R 为光纤圈半径,A 为光纤光路所包汗的面积,为干涉仪的转速。
对应于一个有N 圈光纤组成的光纤环,相当于光波在环路中传播N 周,Ωc R πτ2=Ω=Ω=Ω=∆cA c R R L s 4422πτΩ产生的总相位差为:2 光纤陀螺仪误差源分析漂移和噪声是光纤陀螺仪误差的主要来源,也是其需要突破的主要技术。
信息化工业捷联惯导系统是一个封闭系统,具有较好的保密性,可在任意时间、任意地点进行导航,具有广泛的适用性,受到越来越多的重视。
捷联惯导系统的硬件基础是其惯性测量单元,该单元由陀螺仪和加速度计组成。
相比其他陀螺,光纤陀螺具有很多优点,如体积小、环境适应能力强等,应用广泛[1]。
为了提高光纤陀螺的精度,实际工程应用中有许多问题亟待解决,首先需要把这些误差辨识出来,主要包括系统误差和随机误差两部分。
系统误差可以通过标定实现补偿,随机误差只能用统计的方法进行研究,该文采用卡尔曼滤波对随机误差进行估计并抑制[2]。
1 光纤陀螺的基础知识介绍1.1 光纤陀螺原理光纤陀螺是一种光纤传感器,广泛应用于导航中。
不同类型的光纤陀螺工作原理是一样的,光纤陀螺的工作原理(如图1所示)是:当一束光从同一点出发,沿同一闭合环路向相反方向传输时,最终会汇合到同一点;当闭合环路绕其中心轴转动时,那么这两束光汇合到同一点时走过的光程相对于惯性空间是不同的,这个光程差和环路的旋转角速度是成正比的,只要知道了光程差就可以得到旋转角速度[1](见图1)。
1.2 常用坐标系(1)地心惯性坐标系:地心坐标系的原点在地球的球心,Z 轴指向北极,OX Y 在赤道平面内,一般定义X 和Y轴指向空间中的两颗恒星。
地心坐标系不随地球参加自转。
(2)地球坐标系:地球坐标系原点在地球球心,Z 轴指向北极,OXY在赤道平面内,X轴指向格林威治经线,Y轴指向东经90°方向。
地球坐标系参与地球自转,所以,地球坐标系和地心坐标系之间有一个地球自转角速度。
(3)地理坐标系:地理坐标系是指东北天坐标系。
地理坐标系的原点选在载体的重心处,X 轴指向东,Y轴指向北,Z 轴沿垂线方向指向天。
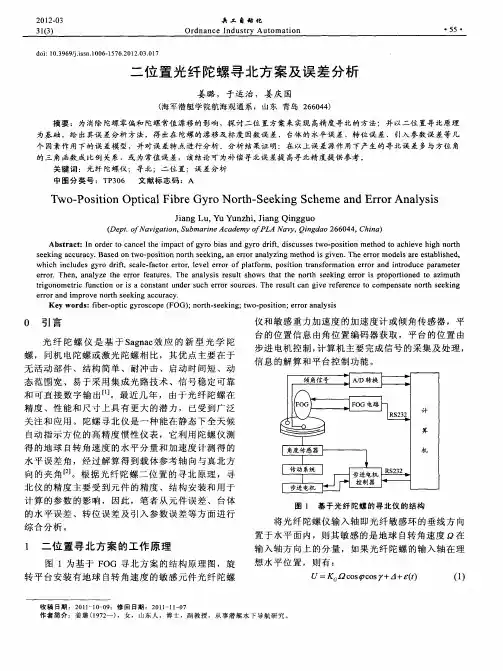
2 光纤陀螺的数据采集系统光纤陀螺数据采集与处理电路有三个工作内容:一是采集加速度计的脉冲信号和光纤陀螺的串口信号,采集外部系统校正信息,如脉冲形式的里程计输出、串口形式的卫星和GPS 输出;二是完成惯性器件的常值误差和随机误差补偿,实现初始对准,根据惯性器件进行导航解算;三是输出载体的位置(经纬度和高度)和姿态(横滚角、俯仰角和航向角),接受来自控制系统的命令。
光纤陀螺偏振误差及关键器件研究的开题报告一、选题背景和意义:光纤陀螺是一种重要的惯性导航传感器,在国防、航空、航天、地震等领域有广泛的应用。
其精度主要受到两个因素的影响,一是角速度测量误差,二是偏振误差。
由于偏振误差影响精度的程度比较大,因此研究光纤陀螺偏振误差及其关键器件,具有重要的理论和应用意义。
二、研究目的和内容:本文的研究目的是探究光纤陀螺中偏振误差的产生机理,并研究陀螺中的关键器件对其偏振误差的影响。
其主要内容包括以下几个方面:1、对光纤陀螺中偏振误差的产生机理进行详细的分析,包括材料的双折射、腔体的对称性等因素的影响;2、对光纤陀螺中关键器件的偏振误差进行测试和分析,包括激光器、光路偏振控制器、光纤耦合器等器件的研究;3、根据实验数据对光纤陀螺中偏振误差的影响进行定量分析,并提出改进方案以提高陀螺的精度。
三、研究方法和技术路线:本文采用实验和理论相结合的方法进行研究,采用以下技术路线:1、分析光纤材料的双折射特性,并通过数值模拟的方法研究其对偏振误差的影响;2、测试光纤陀螺中关键器件的偏振误差并进行数据分析,例如使用偏振分析仪对器件进行测试并计算其对陀螺的影响;3、结合实验数据和理论分析,提出改进方案并进行预期的理论验证。
四、研究难点与创新性:本文研究的难点在于光纤陀螺偏振误差的量化分析和相关器件的研究。
我们需要通过精确的实验数据和理论模拟进行深入研究,从而找到问题的关键点并提出解决方案。
此次研究的创新点在于对光纤陀螺中偏振误差的深入探究,提出改进方案以提高陀螺精度。
这将推进光纤陀螺的应用和发展,为国防和民用领域提供更为精确的导航和测量服务。
五、研究进展计划:本文的研究工作预计将分为以下几个阶段:1、文献综述和理论分析阶段,包括对光纤陀螺中偏振误差的产生机理和量化分析进行深入研究;2、关键器件的测试和数据分析阶段,包括激光器、光路偏振控制器、光纤耦合器等器件的测试和分析;3、方案提出和实验验证阶段,包括根据研究结果提出改进方案并进行实验验证,以期对光纤陀螺的精度提出有力的保障措施。
光纤陀螺仪的误差分析目前光纤陀螺的研究和应用中还存在着一些关键技术需要作进一步的深入研究。
最突出的问题就是存在许多难以解决的误差源。
一、光纤陀螺仪的分类光纤陀螺按其光学工作原理可分为三类:1、干涉式光纤陀螺(IFOG)2、谐振式光纤头陀螺(RFOG)3、受激布里渊散射式光纤陀螺(BFOG)其中干涉式光纤陀螺技术已完全成熟并产业化,而谐振式光纤陀螺和受激式布里渊散射式光纤陀螺还处于基础研究阶段,尚有许多问题需要进一步探索。
所以这里主要探讨干涉式光纤陀螺的误差分析。
二、干涉式光纤陀螺原理干涉式光纤陀螺的主体是一个萨格奈克(Sagnac)干涉仪,由宽带光源(如超发光二极管或光纤光源)、光纤耦合器、光探测器、Y分支多功能集成光学芯片和光纤线圈组成,其原理基于萨格奈克效应:当陀螺旋转时,光纤线圈内沿顺时针和逆时针方向传播的两束广波之间产生一个与旋转角速率成正比的相位差:式中:R为光纤线圈的半径;L为光纤长度;为光源平均波长;c为真空中的光速。
图1 干涉式光纤陀螺的机构组成三、光纤陀螺的噪声来源由于环境及光纤陀螺本身的各种噪声源的影响,光纤陀螺输出信号中存在着各种随机误差项。
为了减少光纤陀螺的误差并提高其精度,需要对其进行性能评价,辨识出影响其精度的主要误差源,以便进一步采取措施消除相关的随机误差。
在实际系统中,萨格纳克效应非常微弱,构成光纤陀螺的每个元件都可能是噪声源,而且存在各种各样的寄生效应,它们都将引起陀螺输出漂移和标度因数的不稳定性,从而影响光纤陀螺的性能。
主要误差源1.光源噪声光源是干涉仪的关键组件,光源的波长变化、频谱分布变化、输出光功率的波动、返回光的干扰,都将直接影响干涉的效果。
另外,返回到光源的光直接干扰了它的发射状态,引起二次激发,与信号光产生二次干涉,并引起发光强度和波长的波动。
(1)光源的波长变化的影响可通过信号处理的方法加以解决。
若波长变化是由温度变化引起,则可直接测量温度而校正波长,否则,必须测量波长进行校正。
(2)返回光的影响可采用光隔离器、信号衰减器、或选用超发光二极管(SLD)之类的低相干光源,来降低反射光与信号光的干涉效果,抑制瑞利背向散射噪声。
光源性能的好坏直接影响到后续光学器件的性能,对于干涉型的光纤陀螺而言,应用宽光谱光源,可以得到很好的零位路径差(null path difference)干涉对比。
如果采用超发光二极管作为光纤陀螺的光源,则必须采取功控和温控措施,甚至在系统中引入光反馈措施,以减少光功率波动引起的陀螺噪声,并通过二倍频、四倍频信号处理电路来消除光功率波动的影响。
2.检测电路噪声光电探测器本身的噪声、调制频率噪声、前置放大器噪声和散粒噪声都是重要的噪声源。
通过优选调制频率可减少l/f噪声分量,用电子学方法可减少放大器噪声,而散粒噪声只能通过选择尽可能大的光源功率和低损耗的光纤通路来增强光信号,提高信噪比。
3.光纤环噪声在光纤干涉仪中,光纤线圈是敏感萨格纳克相移的传感元件,同时又对各种物理量极为敏感。
光纤的瑞利背向散射效应、双折射效应、克尔效应、法拉第效应以及温度效应等都将使光纤线圈传输的光信息发生变化,引起陀螺噪声,这是光纤陀螺最大的噪声源。
(1)光纤的瑞利后向散射效应,起因于光纤内部介质的不均匀性、光纤通路中的焊接点以及与器件的耦合点,它是光纤陀螺的一项主要噪声源。
在光纤通路中,这种背向散射光被强加于传输光上。
当光纤中的背向散射光与主光束相干叠加时,对主光束将产生相位影响,形成相位误差。
为了抑制此项噪声,通常采用两种办法:一是采用短相干光源。
瑞利背向散射引起的相位噪声大小依赖于光源的相干长度,若采用短相干光源,则散射光对主光束的相干度很小,主光束的相位基本上不受散射光的影响,可有效抑制瑞利散射引起的相位噪声。
二是在光纤线圈的一端进行相位调制,选择合适的调制频率,使左右旋转的两束瑞利散射光的偏振调制相位正好相差180,二者的光强相互抵消,可消除返回光源的光信号的附加幅度调制噪声。
(2)光纤的双折射效应主要是指光纤在应力作用下引起传输偏振态变化,造成干涉信号波动,使陀螺产生漂移。
通常采用保偏光纤绕制光纤线圈,并在光纤光路中引入高消光比的偏振器或偏振控制器,可较好地解决双折射效应问题。
(3)克尔效应是一种电感应双折射,是极为快速的非线性效应,它与光纤的有效折射率和传输的光强有关。
当沿光纤线圈左右旋传输的两束光波强度不等时,就会产生两束光的传播常数不同,带来非互易的相位误差。
通常,抑制的办法是:一、光源采用占空比50%的方波调制;二、选用宽频谱光源;三、使用分束比差少且稳定的定向耦合器作为光路的分束/合束器件。
(4)法拉第效应是一种磁感应旋光性,即在磁场作用下产生的旋光效应。
光纤线圈中的法拉第效应会产生偏振相位误差,它的大小和方向与磁场的强度、方向及光纤的双折射有关。
因此,磁场作用将引起干涉信号失调,产生漂移,对此,可采用高双折射的保偏光纤,并对光纤线圈加以磁屏蔽。
(5)温度效应一方面表现在环境温度变化时光纤线圈的面积发生变化,引起标度因数的不稳定性。
通过测量环境温度信息可对转动速率测量值进行校正。
此外,把光纤精心绕制在一个热膨胀系数与光纤材料相近的骨架上,减少骨架与光纤之间的热应力,也是减少噪声的有效措施。
另一方面,温度效应表现在热辐射造成光纤线圈局部的温度梯度,引起左右旋光路光程的不等,产生附加相移,故通常采用沿光纤长度方向以中心对称方式绕制的光纤线圈,并用导热性好的金属箔片加隔热层对光纤线圈进行热屏蔽,可减少热辐射的影响。
另外,光纤线圈绕制过程中会给光纤带来附加应力,应力的存在将使系统传播光波的状态发生变化,影响输出的稳定,因此采用恒张力绕制光纤也是一项重要措施。
4.光路器件噪声为了构成光纤干涉光路,保证光路互易性以及灵敏度的最优化,在光路中引入了各种器件。
然而,由于这些器件的性能不佳以及器件引入后与光纤的对接所带来的光轴不对准、接点缺陷引起的附加损耗和散射等,将产生破坏互易性的新因素。
由这些因素引起的噪声称之为光路器件噪声,包括定向耦合器的损耗及分束比偏差、相位调制器的寄生偏振调制、调制幅度和调制频率的变化等。
减少这些器件噪声的手段主要是,提高器件性能和光路组装的工艺水平,以获得高性能的器件和光路。
5.其他噪声上面讨论的光源噪声、探测器噪声、光纤线圈噪声和光路器件噪声是影响光纤陀螺性能的主要噪声源。
除此之外,背景噪声、热噪声、振荡复合噪声、线路噪声、暗电流噪声、电子噪声、环境噪声(如温度变化)、声频扰动、机械振动及任何其他大规模扰动等(如地球磁场变化等)也都是影响光纤陀螺性能的噪声源。
为了提高光纤陀螺敏感角速度灵敏度和精度,通常采用以下技术:(1)采用单模互易性配置,以排除外界环境的扰动,如温度的影响;(2)采用调制-解调的偏置方案,即在光纤线圈末端使用相位调制器,以进行方波调制或正弦调制;(3)使用宽带光源,以减少相干噪声和漂移;(4)以闭环形式实现系统,提高标度因子的稳定度和线性度;(5)使用多功能集成光器件和保偏光纤。
四、光纤陀螺的随机噪声特性分析光纤陀螺的工作原理是通过光纤线圈产生Sagnac效应来敏感旋转角速度,由于受到构成光纤陀螺的各个元器件的噪声和各种寄生效应的影响,给光纤陀螺引入了各种随机误差。
光纤陀螺输出信号中存在的主要误差源有角度随机游走、零偏不稳定性噪声、角速率随机游走、速度斜坡、量化噪声、指数相关噪声以及正弦噪声等,它们的特性分析如下:1.角度随机游走噪声(ARW)角度随机游走(Angular Random Walk)是宽带速率功率谱密度积分的结果,是衡量光纤陀螺噪声水平的重要指标,体现了陀螺的极限精度。
它主要来源于光路,是由于光子的自发辐射引起的,特别是光电探测器(散粒噪声、放大器噪声)、电子器件(热噪声)和一些相关时间比采样时间短的高频噪声。
角度随机游走噪声的带宽一般小于10Hz,因此,在大部分姿态控制系统的带宽之内,如果不能精确确定角度随机游走,它将成为限制姿态控制系统性能的主要误差源。
对于相关时间比采样时间短的高频噪声,可以通过优化系统设计来消除,而光源、光电探测器、电子器件噪声的消除可以通过选用质量好的器件、保证环境温度的稳定等方法。
这类噪声项可用陀螺仪输出的白噪声功率谱来描述,相关的速率功率谱密度(PSD)为式中N为角度随机游走系数。
2.零偏不稳定性噪声(BI)零偏不稳定性噪声(Bias Instability)主要是由角速率数据中的低频零偏波动引起,其来源有:光纤陀螺中的放电组件、等离子体放电、电路噪声、环境噪声以及其他可能产生随机闪烁的部件。
这一噪声得速率功率谱密度为式中,B为零偏不稳定系数,为截止频率。
3.速率随机游走噪声(RRW)速率随机游走噪声(Rate Random Walk)是宽带角加速度功率谱密度积分的结果,其来源不太确定,可能是具有长相关时间的指数相关噪声的极限情况。
这一噪声的速率功率谱密度为其中,K为速率随机游走系数。
4.速率斜坡(RR)速率斜坡(Rate Ramp)本质上是一种确定误差,而不是随机误差,在光纤陀螺输入与输出特性的数据中出现,可能是由于光纤陀螺光源强度呈现极慢的单调变化并持续很长时间,也可能是由于在同一方向上平台保持一个非常小的加速度,或者由于外界环境引起光纤陀螺的温度变化引起的。
速率斜坡的功率谱密度为:式中,R为速率斜坡系数。
5.量化噪声(QN)量化噪声(Quantization Noise)是由传感器输出的量化性质及光纤陀螺的数字输出特性引起,代表了传感器的最低分辨率水平。
量化噪声的大小取决于数据采集系统的精度和初始采样时间的选取,具有短的互相关时间,相当于具有很宽的带宽,在采样速度要求很快的应用环境里,量化噪声会造成很大的噪声,需要采取措施抑制。
量化噪声的角度功率谱密度为,式中,Q是量化噪声系数。
Q的理论极限是,其中S是光纤陀螺的标度因数。
由上式所示的角度功率谱密度可得到角速率功率谱密度:,6.指数相关噪声(马尔可夫噪声)指数相关噪声(Exponential Correlation Noise)是一个按照指数规律衰减的有限相关时间函数,其自相关函数为式中,为噪声幅度,为指数相关过程的相关时间。
由维纳—辛钦定理可得该噪声的速率功率谱密度为7.正弦噪声正弦噪声(Sinusoidal Noise)是一种系统性误差,它的功率谱特性由一个或多个不同的频率确定,低频率的噪声是由于环境的周期性变化而引起测试平台的低速运动而引起的。
包含单个频率正弦噪声的功率谱密度可表示为式中,是正弦噪声的振幅,为频率,δ(t)是Diracδ函数。
五、随机误差特性分析方法1.Allan方差分析方法目前对光纤陀螺的随机误差分析都是利用Allan方差分析方法,在IEEE标准中Allan方差(AVAR)是表征频率稳定度的一种通用的手段。