RecurDyn成功案例-三一
- 格式:pdf
- 大小:188.21 KB
- 文档页数:1
jigsaw本範例使用RecurDyn V7R1軟體的介面操作出處來自虎門科技公司廖偉志之線上學習資源網¾Part 1¾操作介面認識¾「merge」工具使用¾將多個單一零件,合併成單一零件¾旋轉 / 平移 / 固定接頭¾運動函數撰寫¾ Part 2¾複製接觸力所需接觸曲面¾進入「Body Edit Mode」編輯¾曲面接觸力定義¾Ext. Surface to Surface contact force ¾Part 3¾求解( Eigenvalue / Kinematic / Dynamic) ¾線性化分析¾動力學分析Part 11. 輸入模型名稱,中間不要有空格,第一字需要是英文字。
「中文命名不建議使用」輸入完後按OK( Parasolid , IGES , STEP , SAT , STL , etc2. 引入外部CAD檔案3.點選Icon Size ,改變Icon & Marker 大小後,按OK4. 點選上方功能表Tools → Merge Body,點選如圖的資料後按空白鍵取消打勾(有打勾,表示要合併的物體,所以要將沒有要合併之物體打勾取消)「Merge Body」可以將數個零件合併成單一零件,但使用上要注意合併後之質心位置和慣性特性是否與合併前相同,若有明顯差異則需要以人工方式填入正確的質量和慣性矩資料!!5. 接著點選B,點選要合併在該物體上3.出現該物體名稱1.2.6. 點選上方功能表Tools → Merge Body ,點選如圖的資料後按空白鍵(留下三個打勾之合併物體)7. 接著點選B ,點選要合併在該物體上3.出現該物體名稱1.2.8. 除了Ground 外,共有四個物件9. 點選視窗,View at Front10. 點選Joint → Translational 平移接頭(只有軸向一個單自由度)定義物體之間的拘束關係--「JOINT」依不同運動自由度,RECUDYN提供豐富的選擇定義彼此之間的關係,接頭也有人稱作「運動副」,但基於英文原意JOINT,簡稱「接頭」。
履带式设备及防脱轨技术探讨——以浙江三一装备有限公司带防脱轨装置和履带式设备为例摘要:随着近年来我国经济的不断发展,房地产、基建等建设领域快速发展,推动了市场对履带式起重机需求量的持续增加。
然而,实际工作过程中,设备在长时间工作容易出现履带松弛,并且由于工作路面不平整,履带下方容易悬空,从而在转弯过程中造成脱轨现象。
下面本文将从产品设备、技术方案、使用示例等方面介绍我司设计的防脱轨装置和履带式设备。
关键词:履带式设备、防脱轨前言随着近年来我国经济的不断发展,房地产、基建等建设领域快速发展,推动了市场对履带式起重机需求量的持续增加,同时,在近年来风电等领域的火热,进一步促进了行业需求的增加,使得我国履带式起重机销量在疫情期间也能保持高速增长。
然而目前中大吨位履带起重机缺乏限制履带脱轨的方式。
实际工作过程中,设备长时间工作容易出现履带松弛,在转弯过程中,由于履带齿与支重轮并未啮合,从而容易造成脱轨现象。
为了克服这些缺点,我司设计出一种履带防脱轨装置和履带式设备以缓解此技术问题。
履带防脱轨装置和履带式设备我司设计了一种履带防脱轨装置和履带式设备。
该产品包括限位器和滑道组件。
滑道组件用于与履带架连接,限位器插装在滑道组件的内腔中,且能够沿滑道组件的内腔上下滑动。
限位器的底部设置有卡槽,卡槽用于与履带板上的履带齿相配合,用于防止履带脱轨。
滑道组件包括上滑道和下滑道,限位器分别与上滑道和下滑道滑动连接。
上滑道用于限制限位器在履带式设备的行驶方向的移动;下滑道用于限制限位器在垂直于履带式设备的行驶方向的移动。
限位器上设置有减重孔。
限位器包括相互连接的滑动部和卡接部;滑动部与滑道组件滑动连接,卡槽设置在卡接部上,且卡槽的开口背向滑动部的方向延伸。
沿滑动部朝向卡接部方向,卡接部的宽度逐渐增加。
限位器包括两个第一立板、两个第二立板和封板。
两个第一立板平行设置,两个第二立板平行设置;第一立板与第二立板垂直;两个第二立板连接在两个第一立板之间,且一个第二立板连接在两个第一立板的一侧,另一个第二立板连接在两个第一立板的另一侧;第二立板的长度小于第一立板的长度,封板连接在第二立板的下端,且处于两个第一立板之间;两个第一立板、两个第二立板的侧向形成滑动部;两个第一立板的内侧和封板的下端面形成卡接部。

企业并购与重组课程作业题目名称:三一重工并购德国普茨迈斯特案例分析XX:王文涵学号:1102391021专业名称:金融硕士指导老师:祚军目录一,企业介绍31.1 三一重工简介31.2 德国普茨迈斯特简介3二,并购过程32.1并购过程3三,并购动因分析43.1 三一重工方面43.1.1企业经营战略43.1.2国竞争环境恶化,海外竞争加剧53.2 德国普茨迈斯特方面63.2.1企业自身经营不善63.2.2 家族式企业后继无人7四,并购效果分析74.1拓宽销售渠道74.2降低产品成本,产品结构升级84.3 企业规模及研发能力升级8 .................................................................................................4.4 并购后财务分析9五,并购后可能遇到的问题95.1 产品成本与产品竞争力的矛盾问题95.2 企业文化融合问题10六,并购案引发的思考106.1 产业基金介入揭示的精细化并购趋势106.2 中联重科出局背后的政治因素11一,企业简介1.1 三一重工简介三一重工股份由三一集团投资创建于1994年,总部坐落于经济技术开发区,是三一集团的核心企业。
公司主要从事工程机械的研发、制造、销售,是中国最大、全球第六的工程机械制造商。
三一重工产品包括混凝土机械、挖掘机、汽车起重机、履带起重机、桩工机械、筑路机械等,其中三一混凝土机械、挖掘机、履带起重机、旋挖钻机已成为国第一品牌,混凝土输送泵车、混凝土输送泵和全液压压路机市场占有率居国首位,泵车产量居世界首位。
自公司成立以来,三一重工每年以50%以上的速度增长。
2011年,公司实现营业收入507.76亿元,同比增长49.54%;净利润86.49 亿元,较上年同期增长54.02% ;每股收益1.14元,同比增长54.02%。
2011年7月,三一重工以215.84亿美元的市值,首次入围FT全球500强,成为唯一上榜的中国机械企业。
RecurDyn 下的C++子程序编写南京理工大学 陈世业对于Recurdyn 而言,当提供的函数表达式不能够更好的表述所实现的功能时,通过子程序的编写对其进行二次开发,用户可以自己定义所需要的力元等来更灵活的操作动力学模型。
下面本文结合一个举升机构模型,通过C++子程序编写机构的液压力函数,来介绍Recurdyn 软件和C++之间如何进行参数传递,并反馈给动力学模型。
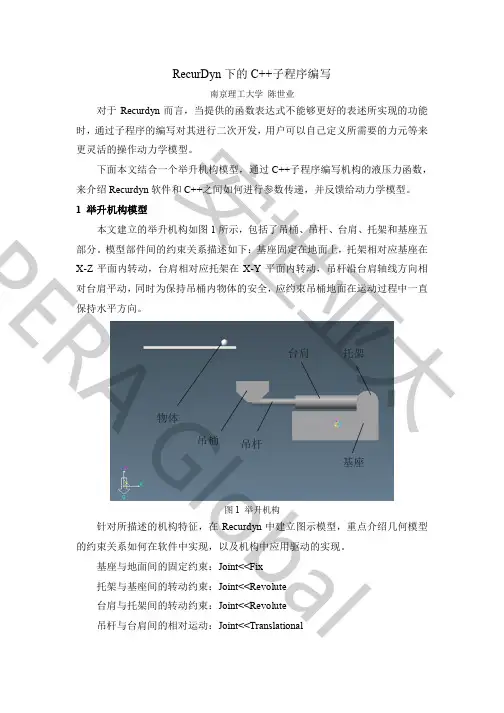
1 举升机构模型 本文建立的举升机构如图1所示,包括了吊桶、吊杆、台肩、托架和基座五部分。
模型部件间的约束关系描述如下:基座固定在地面上,托架相对应基座在X-Z 平面内转动,台肩相对应托架在X-Y 平面内转动,吊杆沿台肩轴线方向相对台肩平动,同时为保持吊桶内物体的安全,应约束吊桶地面在运动过程中一直保持水平方向。
物体吊桶吊杆台肩托架基座图1 举升机构 针对所描述的机构特征,在Recurdyn 中建立图示模型,重点介绍几何模型的约束关系如何在软件中实现,以及机构中应用驱动的实现。
基座与地面间的固定约束:Joint<<Fix 托架与基座间的转动约束:Joint<<Revolute 台肩与托架间的转动约束:Joint<<Revolute 吊杆与台肩间的相对运动:Joint<<Translational 安世亚太P E R A G l o b a l吊桶约束关系的建立:吊桶与吊杆相连接,在实际情况中,吊桶底端平面应在机构运动过程中始终保持水平,并可以随着吊杆在X-Y 平面和X-Z 平面内转动,由上可知,吊桶上任意一点的运动,与托架和基座的铰接点一致,因此,可以设吊桶和吊杆在底端为Joint<<Revolute ,并对吊桶质心Maker 点与托架铰接Maker 点进行方向定位Joint<<Orientation 。
部件间的约束关系如图2所示。
图2 机构间约束 部件间的约束力:铰接在不存在外力的情况下,连接的两个Body 间会自由转动,应限制机构中吊桶和台肩的转动,在Revolute 施加扭簧力Forec<<Ratational spring ,并设置合适的刚度和阻尼;对于吊杆和台肩,其相对运动始于弹簧力或者液压作用力,并在达到所需的伸长长度时机构相对锁死,在这里同时设置轴向力Axial 和弹簧力Spring 来模拟上述作用,其中轴向力为指令响应力,弹簧力模拟缓冲力。

第1期2021年1月机械设计与制造Machinery Design&Manufacture167基于RecurDyn和ANSYS的液压挖掘机动臂结构优化设计管琪明,解思状,贺福强,曹刚(贵州大学机械工程学院,贵州贵阳550025)摘要:液压挖掘机动臂存在设计冗余的问题,为了对动臂的截面参数进行优化,首先对动臂的餃点受力进行了分析,建立了多体动力学模型,通过刚柔耦合动力学仿真,确定了动臂的各个较点在坐标轴方向上的最大受力。
通过单因素静力学仿真试验,建立了臂截面参数与最大等效应力之间的单因素数值拟合模型,通过多因素正交仿真试验,建立了多因素复合数值拟合模型,并将试验值与数值模型计算值进行比较,验证了模型的准确性。
最后,以最大等效应力的最小值和抗弯截面系数的最小值为优化目标,利用遗传算法进行参数优化,获取最优设计变量。
优化结果表明,优化后的截面参数较常规设计更能综合发挥材料的能力,优化方法为减少冗余设计提供了参考o关键词:结构优化;仿真分析;单因素数值拟合;多因素数值拟合;遗传算法中图分类号:TH16;TH122文献标识码:A文章编号:1001-3997(2021)01-0167-04The Structural Optimization Design of Hydraulic ExcavatorBoom Based on Recurdyn and ANSYSGUAN Qi-ming,XIE Si-zhuang,HE Fu-qiang,CAO Gang(School of Mechanical Engineering,Guizhou University,Guizhou Guiyang550025,China)Abstract:Tn order to optimize the cross section parameters of the excavator boom which has design redundancy matter,the force of the hinge point of the boom is analyzed at first.Then a multi-body dynamic model is established,throu^i the rigid—flexible coupling dynamics simulation analysis,the maximum force of each hinge point in the coordinate axis direction is determined.Based on the static simulation analysis,a stride factor numeric a l f itting model between the arm,section parameters and the maximum equivalent stress is established.According to the multi-factor orthogonal test,a multi-factor composite numerical fitting model is established,and the experimental values are compared with the calculated values of the numerical model to verify the accuracy of the numerical modeLLast,taking the minimum of the maximum equivalent stress and the minimum of the bending section coefficient as the optimization objectives,the genetic algorithm,is used to optimize the parameters and obtain the optimal design variables.The optimization results show that the optimized section parameters have lower maximum equivalent stress value than the conventional design,which is helpful to reduce the failure probability of the boom.lt can provide reference for related design.Key Words:Structural Optimization;Simulation Analysis;Single Factor Test;Orthogonal Test;Genetic Algorithm1引言液压挖掘机动臂结构的设计冗余影响着工作装置的可靠性和作业能力,需要对其结构参数进行优化设计。
关于RecurDyn履带仿真的一些问题和解决方案由于课题需要,急需一款多体动力学软件做履带车辆仿真,由于Adams的A TV模块属于商业化模块,极其难找,所以转向RecrDyn的使用上,参考教材是焦晓娟编著的《RECURDYN多体系统优化仿真技术》(群文件中可找到,教材用的软件版本是V7)。
书中有LM(低速履带模块)的实例教程,步骤非常详细,并不难,但缺乏详细的讲解,只能照猫画虎,结果问题百出,求解器各种报错,访遍各大引擎论坛,用尽各种手段仍然找不到头绪(RD现状,参考资料实在太少)。
在一筹莫展之际,偶然进入RecurDyn高校技术QQ 群,在群主罗老师的帮助下,各种问题顺利解决,群主很强大,一直耐心的指导我,帮我看模型,给我提出问题所在和宝贵建议,真的十分感谢其无私的帮助和分享。
本着本群互相学习,互相交流的精神,将我碰到的各种问题和解决方法整理了一下,与各位一起分享,希望有用到此模块的可以有所借鉴,少走弯路。
不多说,问题来了。
问题一:导致此问题多半由于履带行走机构设计的不合理。
可能是由于添加惰轮的时候忘了调整宽度,也可能设计的机构无法正常工作或者履带属性中Bushing force中各参数设置不合理而导致的。
只能修改自己的机构进行解决了。
另外注意:设计机构千万要合理细心,否则后面会有麻烦。
问题二:如果要将链轮和履带板等部件改成自己的参数,十有八九都会碰到这个问题,无法有效啮合。
经过反复尝试,给出我的解决方案:如果在最简单的(只有链轮和带轮的结构下)出现报错,试着加个托带轮,并认真调整它的高度。
我建的几个模型都是通过这种办法解决的,如有更好的建议欢迎补充。
另外注意:有可能支重轮和托带轮的纵向位置稍微改变就会导致仿真失败,建议建模时一步一步增加部件,随时仿真验证。
问题三:可以仿真,但是履带穿透链轮或者惰轮。
这个可以通过调整履带属性中Bushing force中各参数试试,实在不行,可以改变机构。
我是通过,增加了链轮齿数,并且将与履带板啮合的齿数调整为2个解决的。
三一重工智能工厂实践案例PLM选型白皮书新年贺岁:活动期间,我们每周精选一篇优质干货,另外,更有机会获得《产品全生命周期管理(PLM)选型指南(第一版)》白皮书!拉到底部,先睹为快三一重工18号厂房是亚洲最大的智能化制造车间,有混凝土机械、路面机械、港口机械等多条装配线,是三一重工总装车间。
2008年开始筹建,2012年全面投产,总面积约十万平方米。
从2012年开始,以三一18号厂房为应用基础,由三一重工、湖大海捷、华工制造、华中科大等单位联合申报的“工程机械产品加工数字化车间系统的研制与应用示范项目”经过3年精心建设,目前,三一已建成车间智能监控网络和刀具管理系统、公共制造资源定位与物料跟踪管理系统、计划、物流、质量管控系统、生产控制中心(PCC)中央控制系统等智能系统,完成了国家批复的项目建设内容。
图 1 三一重工智能工厂同时,三一还与其他单位共同研发了智能上下料机械手、基于DNC系统的车间设备智能监控网络、智能化立体仓库与AGV运输软硬件系统、基于RFID设备及无线传感网络的物料和资源跟踪定位系统、高级计划排程系统(APS)、制造执行系统(MES)、物流执行系统(LES)、在线质量检测系统(SPC)、生产控制中心管理决策系统等关键核心智能装置,实现了对制造资源跟踪、生产过程监控,计划、物流、质量集成化管控下的均衡化混流生产,智能化功能和系统性能指标达到国家批复要求。
一、智能加工中心与生产线1、智能化加工设备早在2007年,有“智能化机械手”之称的焊接机器人现身三一挖机生产线,并在2008年后得到进一步推广。
2012年三一重工在上海临港产业园建成全球最大最先进的挖掘机生产基地,焊接机器人大规模投入使用,大幅提升了产品的稳定性,使得三一挖掘机的使用寿命大约翻了两番,售后问题下降了四分之三。
由于规范了管理,又进一步提升了整个生产体系的效率。
不但如此,机器人的使用减少了工人数量,管理模式的重心从原来的管人转移到了管理设备上,相对而言,管理设备要容易很多。
张小只智能机械工业网【案例】三一重工带你瞬间看清所谓的工业4.0!
对于工业4.0,其实可以理解为二横一纵。
一个横是价值网络的横向集成,就是跨企业的集成;另外一个横就是从客户到客户的企业内部核心业务集成;一纵就
是从客户订单一直到智能设备的制造过程的打通。
本文就是以三一重工为案例来为你瞬间清晰所谓的工业4.0。
三一重工1989 年成立至今,已经发展成为全球第五大工程机械制造商,我们就是通过业务流程变革优化企业的运行秩序,归纳下来就是打通了二横一纵三条线。
第一条线就是企业的端到端的集成,包括客户关系管理,供应商协同。
第二条是企业的横向集成,从产品设计到生产交付的集成。
我们搭建了全球协
同研发平台,我们的混凝土泵车超长臂架技术获得国家技术发明奖二等奖,这是很少
见的;我们的智能制造,从数字化的工厂规划,一直到智能车间,我们18 号厂房被工信部评为数字化制造的样板工厂。
第三条就是我们一直到底层生产设备的纵向集成,从ERP 到MES 到智能设备
的终端,最后产出智能产品和智能服务。
我们通过ECC 管理20 万台智能产品并提供智能服务。
一横:跨企业端到端的横向集成
这一横是基于流程的业务变革。
作为一个大型的制造企业,其实你从技术层面
去解决问题是一个方向,但是首先整个公司的业务流程,你是不是市场导向的,是不
是客户导向的,是不是一个端到端的业务逻辑。
这个是我们这些年一直在打造和优化
的一个方向,因为你如果没有业务流程的流程化,你是很难通过纯技术手段去实现智
能制造的落地。
张小只机械知识库。
(起重机的整机动力学模型)
支撑与环轨变形协调等技术难题。
为解决超起配重小车与主机同步运动的技术难点,必须利用数字样机技术建立多体动力学模型、液压模型和控制模型,并通过联合仿真进行验证和优化分析。
而建立完整的多体动力学模型的关键是多履带系统的建模与仿真,只有履带系统真实的反映物理现象,才能对控制方案进行验证,并最终实现超起配重小车与主机的同步运动。
而回转支撑与环轨的变形协调影响回转支撑和环轨的受力分配,其结果对结构设计和液压系统设计有关键的影响。
常规的理论计算和整机
的算出其载荷分配,三一通过多体动力学软件建立整机柔性体模型,并借助超算中心的强大计算能力,分析。