机器人运动学逆解及笛卡尔空间轨迹规划
- 格式:pdf
- 大小:9.23 MB
- 文档页数:74

面向机器人笛卡尔空间的轨迹运动自适应抑振控制作者:李琳古智超张铁来源:《振动工程学报》2021年第03期摘要:工業机器人的柔性传动部件导致机器人末端产生振动,严重降低笛卡尔运动精度,为此提出自适应输入整形抑振控制策略。
以“双惯量模型+PD控制”建立关节伺服系统模型,分析振动特性。
由于运动中的振动信号存在较大噪声,无法准确辨识振动频率和阻尼比,故采用基于递推最小二乘法(Recursive Least Squares, RLS)的任意时延输入整形器自适应设计方法。
通过对笛卡尔轨迹规划的归一化插补函数输入整形,提出笛卡尔轨迹输入整形方法,实际表现为重新规划笛卡尔速度大小而不改变运动方向。
输入整形抑振实验中直线轨迹振动信号能量最大降低77.08%,圆弧轨迹振动信号能量最大降低31.07%,残余振动信号能量降低80%以上,验证了所述抑振控制策略能有效抑制机器人笛卡尔运动启停时的振动。
关键词:工业机器人; 振动抑制; 柔性关节; 自适应输入整形; 笛卡尔运动中图分类号: TP242.2; TB535 文献标志码: A 文章编号: 1004-4523(2021)03-0499-08DOI:10.16385/ki.issn.1004-4523.2021.03.007引言工业机器人的柔性传动部件(如谐波减速器、同步带等)启动和停止时导致机器人末端存在较大的振动,严重降低了运动精度[1]。
在工业生产中,要求工业机器人具备高速、高精度的运动控制特点,故需要研究抑制末端振动的控制策略。
柔性关节通常采用双惯量模型描述,振动现象属于伺服系统的机械谐振[2]。
常用的伺服振动控制方法包括陷波滤波器[3⁃4]、状态反馈法[5⁃6]、迭代学习控制[7] 、输入整形器[8⁃9]等。
输入整形器利用特定的脉冲序列与参考输入进行卷积运算得到抑振控制输入。
与陷波滤波器和低通滤波器相比,输入整形器的抑振效果更优且具有更短的滤波时间长度[10]。


机器人学领域中的运动学与轨迹规划机器人学是一门研究如何设计、制造和应用机器人的科学和技术。
机器人学领域中的运动学和轨迹规划是机器人学的核心内容之一。
一、运动学运动学是机器人学中研究机器人运动状态的学科,并且是一种描述机器人位置、速度和加速度等运动参数的方法。
一个完整的机器人都可以通过由多个关节组成的联动机构进行自由灵活的运动。
因此,了解每个关节的运动参数,包括角度、速度和加速度等,有助于更好地控制机器人的运动。
1. 机器人的运动学参数机器人的运动学参数包括关节角度、机器人的位姿和机器人工具端点的位姿等。
其中,各个关节的角度是决定机械臂位置的最基本的参数,机器人位姿描述机器人身体的位置、方向和姿态等信息,而机器人工具端点的位姿描述机器人工具的位置和方向信息。
了解这些运动学参数对于需要实现机器人的运动控制和规划非常重要。
机器人学家们研究如何控制和规划机器人的运动,以便机器人能够完成各种各样的任务,例如生产线上的组装、协作机器人之间的交互等。
2. 机器人的运动学模型机器人的运动学模型主要用于描述机器人的运动规律和动力学参数,包括机械结构参数、质量分布以及摩擦系数等。
运动学除了能够定义机器人的位置和运动规律外,还能够对机器人进行动力学仿真和运动规划,使机器人的控制更加精确和高效。
3. 常见的机器人运动学模型(1)PUMA模型PUMA模型是一种广泛应用于工业机器人的模型之一,其中PUMA的全称为:Programmable Universal Machine for Assembly,即用于装配的可编程通用机器。
PUMA机器人由5个自由度的旋转关节构成,使它能够沿x,y和z轴进行运动。
(2)SCARA模型SCARA(Selective Compliance Assembly Robot Arm)是一种广泛应用于装配和加工的机器人,具有三个旋转角度和一个平移自由度。
SCARA机器人通常用于精确的三维加工和装配任务,如内部器件装配、晶片制造等。

6轴机械手笛卡尔坐标系什么是6轴机械手?6轴机械手是一种机器人,具有6个自由度。
它的设计灵感来源于人类的手臂,可以在各种环境和任务下执行复杂的操作。
这种机械手通常由基座、臂部、腕部和爪子组成。
每个部分都可以进行独立运动,以便适应不同的需求。
机械手的各个关节可以由电机驱动,实现灵活的运动能力。
这些关节通常是旋转或旋转加平动的,使机械手能够在三维空间内工作。
通过控制这些关节的运动,机械手能够移动和操作物体。
什么是笛卡尔坐标系?笛卡尔坐标系是一种用于描述物体位置和方向的数学模型。
它由直角坐标系组成,包括X轴、Y轴和Z轴。
这三个轴相互垂直,形成一个三维空间。
在笛卡尔坐标系中,物体的位置可以由三个数值表示,分别表示在X、Y 和Z轴上的坐标。
在机械手的应用中,笛卡尔坐标系可以用来描述机械手末端执行器(通常是爪子)的位置和方向。
通过在笛卡尔坐标系中设定目标点,机械手可以通过控制各个关节的运动,使末端执行器达到目标点的位置和方向。
步骤一:关节坐标和笛卡尔坐标的转换在机械手的控制中,有时需要将关节坐标转换为笛卡尔坐标,或者将笛卡尔坐标转换为关节坐标。
这样可以方便地在不同的坐标系中对机械手进行控制。
首先,我们需要确定机械手的关节参数,即各个关节相对于基座的位置和方向。
然后,通过运动学逆解算,可以将笛卡尔坐标转换为关节坐标。
这样就可以确定各个关节的角度,使机械手末端能够达到目标点的位置和方向。
而将关节坐标转换为笛卡尔坐标则相反。
通过运动学正解算,可以确定机械手末端执行器在笛卡尔坐标系中的位置和方向。
步骤二:控制机械手的运动控制机械手的运动涉及到各个关节的协同操作。
通过控制各个关节的角度,可以使机械手末端执行器在笛卡尔坐标系中移动到指定的位置。
一种常用的方法是使用逆运动学控制。
逆运动学控制通过对机械手的目标位置进行逆运动学求解,得到各个关节的角度。
然后,将这些角度反馈给机械手的控制系统,控制各个关节的运动。
除了逆运动学控制,还可以使用轨迹规划来控制机械手的运动。
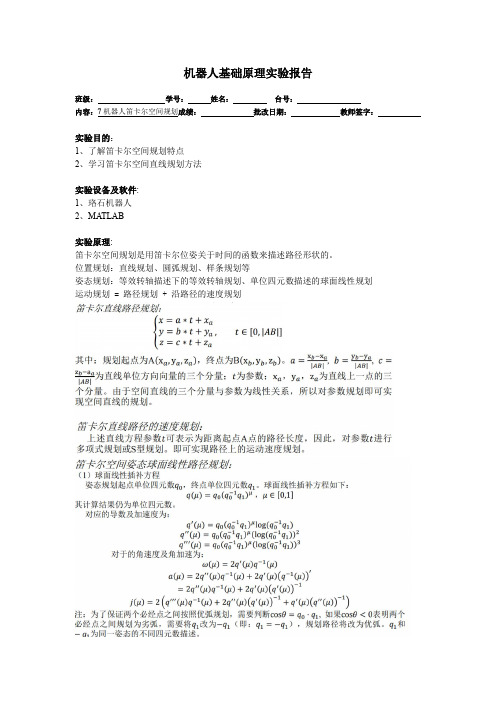
机器人基础原理实验报告班级:学号:姓名:台号:内容:7机器人笛卡尔空间规划成绩:批改日期:教师签字:实验目的:1、了解笛卡尔空间规划特点2、学习笛卡尔空间直线规划方法实验设备及软件:1、珞石机器人2、MA TLAB实验原理:笛卡尔空间规划是用笛卡尔位姿关于时间的函数来描述路径形状的。
位置规划:直线规划、圆弧规划、样条规划等姿态规划:等效转轴描述下的等效转轴规划、单位四元数描述的球面线性规划运动规划 = 路径规划 + 沿路径的速度规划实验步骤:1、代码实现空间位置直线规划和姿态四元数球面线性规划。
使用MATLAB软件打开\\东大机器人实验程序\7、7、机器人笛卡尔空间规划\sia007.slx 文件。
选择Part1 轨迹规划,补充直线规划模块内容2、在part1中,完成下列数据的笛卡尔空间直线规划和姿态四元数球面线性规划,并绘制位置的三个分量和姿态四元数的四个分量。
利用完成的模块,绘制规划曲线图3-1图3-2图5-1图5-2图3-3图5-3图3-4图3-5图5-4图5-53、针对给定的起点和终点分别进行关节空间规划(利用实验六的实验工程完成)和笛卡尔空间的位置直线规划,姿态球面线性规划(利用本实验的part2部分完成)。
并将关节空间规划结果利用正运动学求得笛卡尔空间曲线。
真机实验步骤:1、打开RokaeNEU007.Slx ,将写好的模块替换到红色框图中2、在桌面程序中单“关闭通信服务”按钮,关闭通信服务进入真机仿真模式。
3、按照前面实验介绍的真机运行步骤运行程序(实验四真机运行步骤2~5)4、控制仿真机器人运动上电开关至on●监控开关至on●更改关节规划走的角度值,更新规划时间●打开运动开关,机器人开始运动,观察运动曲线是否连续,若连续方可进行下一步5、在桌面程序中单“重启通信服务”按钮,启用真机模式。
6、重复步骤3,步骤4,运行程序五次多项式速度规划注意事项:1、规划的空间曲线避开机器人奇异点。
六自由度机械臂轨迹规划及优化研究一、本文概述理论基础与问题阐述:本文将系统梳理六自由度机械臂的数学模型,包括其笛卡尔坐标系下的运动学逆解与正解、动力学建模,以及关节空间与操作空间之间的转换关系。
在此基础上,明确阐述轨迹规划与优化所面临的关键问题,如奇异位形规避、关节速度与加速度限制、路径平滑性要求、动态负载变化等因素对规划算法设计的影响。
轨迹规划方法:针对上述问题,我们将探讨和比较多种有效的轨迹规划策略。
这包括基于插值的连续路径生成方法(如样条曲线、Bzier曲线),基于优化的全局路径规划算法(如RRT、PRM等),以及考虑机械臂动力学特性的模型预测控制(MPC)方法。
对于每种方法,将详细分析其原理、优势、适用场景及可能存在的局限性,并通过实例演示其在典型任务中的应用效果。
轨迹优化技术:在基本轨迹规划的基础上,本文将进一步探究如何运用先进的优化算法对初始规划结果进行精细化调整,以达到性能最优。
这包括使用二次规划、非线性优化、遗传算法等手段对轨迹的关节角序列、时间参数化、能量消耗等指标进行优化。
还将讨论如何引入避障约束、柔顺控制策略以及自适应调整机制,以增强机械臂在复杂环境和不确定条件下的适应性和鲁棒性。
实验验证与性能评估:本文将通过仿真研究与实际硬件平台上的试验,对所提出的轨迹规划与优化方案进行详细的验证与性能评估。
实验设计将涵盖多种典型应用场景,考察规划算法的计算效率、轨迹跟踪精度、能耗表现以及对意外扰动的响应能力。
实验结果将以定量数据与可视化方式呈现,以便于对比分析和理论验证。
本文致力于构建一套全面且实用的六自由度机械臂轨迹规划与优化框架,为相关领域的研究者和工程技术人员提供理论指导与实践参考,推动六自由度机械臂技术在实际应用中的效能提升与技术创新。
二、六自由度机械臂系统建模在六自由度机械臂的研究与应用中,系统建模是一个关键环节。
本节将重点讨论六自由度机械臂的数学建模,包括其运动学模型和动力学模型。
机器人运动学与动力学的轨迹规划近年来,机器人技术越来越受到关注,被广泛应用于各个领域,如工业制造、医疗保健、农业等。
机器人的运动学和动力学是其中非常重要的两个方面。
在机器人的路径规划中,运动学和动力学的特性对于实现精确且高效的轨迹规划至关重要。
在机器人运动学中,研究的是机器人的位置和位姿的数学描述,包括了关节坐标和笛卡尔坐标系两种描述方法。
关节坐标系通过机器人的关节角度来描述机器人的位置和姿态,而笛卡尔坐标系则通过机器人的位姿参数来描述。
在进行轨迹规划时,机器人的运动学模型可以用来计算机器人在关节空间和笛卡尔空间中的运动路径。
运动学模型的好处在于能够将机器人的轨迹规划问题转化为几何学问题,从而简化了路径规划的计算过程。
与运动学不同,机器人的动力学研究的是机器人的运动与力之间的关系。
动力学模型可以描述机器人在进行运动时所受到的力和力矩。
动力学模型的建立需要考虑到机器人的质量、惯性、摩擦等因素,从而能够更精确地预测机器人的运动特性。
在轨迹规划中,动力学模型可以用来优化机器人的运动轨迹,以实现更加平稳、高效的运动。
轨迹规划是机器人运动控制中的一个重要问题,在实际应用中需要考虑到多种因素。
其中,避障是轨迹规划中常见的挑战之一。
通过运动学和动力学的分析,可以根据机器人的运动特性预测其可能的运动轨迹,并在规划路径时避开障碍物,以确保机器人的安全运行。
此外,路径规划还需要考虑到机器人的速度、加速度限制等因素,以保证机器人在运动过程中的动力学特性不会过于剧烈,从而降低机器人运动的顺滑性和精度。
机器人的轨迹规划可以使用多种方法,常见的包括解析法、优化法和仿真法等。
解析法是利用运动学和动力学方程直接求解轨迹规划问题,以得到机器人的运动方程和运动控制模型。
优化法则是通过设定优化目标和约束条件,利用优化算法求解最优的机器人路径规划问题。
仿真法则是通过建立机器人运动学和动力学模型,并在计算机中进行仿真,模拟机器人在不同环境下的运动情况,以寻找最佳的轨迹规划方案。