机器人原理及控制技术第0304章 运动学方程与逆运动方程
- 格式:ppt
- 大小:1.08 MB
- 文档页数:63
机器人原理及控制技术第0304章运动学方程与逆运动方程运动学方程和逆运动学方程是机器人控制技术中非常重要的概念。
运动学方程描述了机器人的运动状态,而逆运动学方程则用于确定机器人关节的控制参数,以实现所需的运动。
运动学方程主要有两种形式:正解运动学方程和逆解运动学方程。
正解运动学方程用于确定机器人末端执行器的位置和姿态与关节参数之间的关系。
逆解运动学方程则用于确定关节参数,以使得机器人末端执行器达到所需位置和姿态。
在正解运动学方程中,我们需要知道机器人各关节的长度和类型,以及关节的旋转角度,通过运动学链式法则可以计算出机器人末端执行器的位置和姿态。
这个过程中可能需要使用正弦定理、余弦定理等几何关系来计算机器人的位置和姿态。
逆解运动学方程则是反过来的过程,已知机器人末端执行器的位置和姿态,我们需要计算出关节的旋转角度,以使得机器人达到所需的位置和姿态。
逆解运动学方程的求解过程非常复杂,需要利用数学工具如牛顿迭代法、杰克逊方法等来求解。
在实际控制中,机器人的运动通常是通过控制各个关节的角度来实现的。
因此,逆运动学方程对机器人的控制非常重要。
一般来说,逆运动学方程有多解性,即有多组关节参数可以使机器人达到所需位置和姿态。
这就给机器人控制带来了一定的困难,需要采用适当的优化算法来选择最优的关节参数。
除了运动学方程和逆运动学方程之外,还有一些其他的数学模型可以用于描述机器人的运动特性,如动力学方程和轨迹规划等。
动力学方程描述了机器人关节和负载之间的相互作用,用于模拟机器人的动力学行为。
轨迹规划则用于生成机器人的运动轨迹,以使得机器人在执行任务时能够平滑地移动。
总之,运动学方程和逆运动学方程是机器人控制技术中非常重要的内容。
运动学方程描述了机器人的运动状态,逆运动学方程则用于确定机器人关节的控制参数。
通过研究和应用这些方程,可以实现对机器人的准确控制,使其能够完成各种任务。
运动学逆解
运动学逆解是机器人学中最重要的技术之一,它主要用于解决机
器人运动问题。
它可以用来求解机器人在特定位置处可以执行哪些运
动动作,并计算出运动动作需要的关节角度。
运动学逆解可以帮助我们轻松实现高精度的机器人运动控制,从
而使机器人能够实现高效、复杂的机械运动操作,比如抓取、放置等。
运动学逆解的原理是通过对机器人关节的位置和角度进行相关计算,来求得机器人在特定位置处的运动动作及其所需的关节角度。
这
些计算的基础是微积分学及其应用在机器人运动学和运动学深度上的
一些方程式,也就是所谓的解析法求解。
运动学逆解通过计算已知位置处机器人所需关节角度,即可求解
出尚未知的关节角度,从而实现机器人在某位置处的运动。
它也可以
用来帮助我们分析不同运动环境下机器人应当采取哪类控制策略,以
获得最大的运动效率。
由此可见,运动学逆解具有重要的意义,是机器人运动控制的基
础性技术,可为机器人实现高效的机械运动操作提供重要支持。
第4章机器人逆运动学(一)引言概述:机器人逆运动学是研究机器人动作规划和控制的重要内容之一。
在工业领域和服务领域中,机器人逆运动学能够帮助机器人根据预设的目标位置和姿态,确定关节角度和长度,从而实现准确的动作控制。
本文将介绍机器人逆运动学的基本原理,以及逆运动学的求解方法和实际应用。
正文:1. 基本原理1.1 前向运动学和逆运动学的关系1.2 关节角度和长度的确定方法1.3 机器人姿态表示方法2. 逆运动学的求解方法2.1 解析法2.2 数值法2.3 迭代法2.4 优化算法2.5 约束条件的处理方法3. 逆运动学的实际应用3.1 机器人轨迹规划3.2 机器人运动控制3.3 机器人碰撞检测与避障3.4 机器人抓取和操作4. 逆运动学问题的局限性和挑战4.1 多解性问题4.2 存在性问题4.3 运动优化问题4.4 环境约束问题4.5 实时性和稳定性问题5. 逆运动学的发展趋势5.1 智能化和自适应控制5.2 机器学习与优化算法的结合5.3 非线性逆运动学求解方法的研究5.4 多机器人协同控制的逆运动学问题5.5 逆运动学在虚拟现实和增强现实中的应用总结:机器人逆运动学是机器人控制领域的重要研究方向之一。
本文介绍了机器人逆运动学的基本原理,包括前向运动学与逆运动学的关系、关节角度和长度的确定方法,以及机器人姿态表示方法。
同时,还介绍了逆运动学的求解方法和实际应用,包括机器人轨迹规划、运动控制、碰撞检测与避障,以及抓取和操作等。
此外,还探讨了逆运动学问题面临的局限性和挑战,并展望了逆运动学的发展趋势,包括智能化和自适应控制、机器学习与优化算法的结合等。
逆运动学的研究将有助于推动机器人应用在更广泛的领域中,提高机器人的灵活性和性能。
《机器人导论》机器人逆运动学在机器人技术的广袤领域中,逆运动学是一个至关重要的概念。
简单来说,逆运动学就是要根据机器人末端执行器(比如机械手的夹爪)的期望位置和姿态,来计算出各个关节应该转动的角度或移动的距离。
想象一下,你有一个机械臂,它就像人的手臂一样,由多个关节连接而成。
当你希望它的手能够准确地到达某个特定的位置,并以特定的姿态抓住一个物体时,你就需要知道每个关节应该如何运动。
这就是逆运动学要解决的问题。
为了更好地理解逆运动学,我们先来看一个简单的例子。
假设有一个平面二连杆机械臂,由两个可以旋转的关节连接着两根连杆。
我们知道机械臂末端的位置坐标(x, y),并且知道两个连杆的长度分别为L1 和 L2。
那么,如何求出两个关节的旋转角度呢?我们可以通过几何关系来解决这个问题。
首先,根据末端位置(x, y),可以计算出从原点到末端的距离 R,通过勾股定理 R =√(x²+y²)。
然后,我们可以计算出第一个关节的角度θ1,它等于 arctan(y /x)。
接下来,计算第二个关节的角度θ2 就稍微复杂一些。
我们可以利用余弦定理来得到,经过一系列的数学推导,最终可以求出θ2。
当然,实际的机器人往往要复杂得多,可能有多个关节,甚至是在三维空间中运动。
对于多关节的机器人,解决逆运动学问题的方法也有很多种。
一种常见的方法是解析法。
这种方法通过数学推导和公式计算来直接求解关节变量。
但它的缺点是对于复杂的机器人结构,推导过程可能会非常繁琐,甚至可能无法得到解析解。
另一种方法是数值法。
其中比较常用的是迭代法。
它通过不断地猜测和修正关节变量的值,逐步逼近正确的解。
这种方法的优点是适用性广,但缺点是计算量可能较大,并且可能会陷入局部最优解。
在实际应用中,选择哪种方法取决于机器人的结构和具体的任务需求。
机器人逆运动学的应用场景非常广泛。
在工业生产中,机器人需要准确地抓取和放置零件,这就需要精确的逆运动学计算来控制机器人的动作。
机器人学中的逆运动学初步研究机器人学作为一门较新的学科,致力于研究利用机器人来模拟人类行为的基础技术。
而机器人的控制则是机器人学领域中非常重要的一部分,其中,逆运动学是机器人控制的关键内容之一。
什么是逆运动学?逆运动学,指的是在机器人的末端执行器给出一个期望的位置或位姿时,计算出机器人各个关节在每个时刻需要的角度或长度,从而使机器人末端执行器实现所期望的位置或位姿。
简单来说,逆运动学问题就是通过末端效应器的位置得到各个关节的角度,从而实现机器人控制的问题。
逆运动学问题可以表示成下面的式子:f(Q) = X其中Q是机器人的关节角度,f代表的就是机器人的正运动学关系式子,X就代表着末端执行器的位姿。
机器人逆运动学的研究内容机器人的逆运动学研究主要有以下内容:(1)求解逆运动学的解析方法解析方法通常是使用数学公式或专门的算法通过求解机器人的逆运动学问题,得到各个关节的角度或长度,从而实现机器人控制。
但是这种方法通常只适用于特殊类型的机器人,例如机器人的关节数目很少或机器人动力学特性非常简单等。
(2)求解逆运动学的数值方法在复杂的机器人控制过程中,解析方法很难使用,甚至可能出现无解的情况。
这时候就需要使用数值方法,通常通过数学模型和计算机程序求解各个关节的角度或长度,从而实现机器人的控制。
(3)逆运动学的实时计算在机器人控制中,有一些特殊的要求,例如运动速度要求非常高或者需要具有很快的响应能力等,在这样的情况下,逆运动学的实时计算就显得非常重要。
逆运动学的实时计算通常使用反向迭代的方法,通过多次迭代计算各个关节的角度或长度,从而实现机器人的控制。
逆运动学的应用机器人逆运动学在工业生产、航空航天、医疗等领域都有着广泛的应用。
以工业生产为例,逆运动学常应用于机床控制、抓取生产工件等方面,这些都需要机器人具有较好的精度和准确性。
而在航空航天、医疗等领域,机器人的运动速度和控制稳定性通常是至关重要的,因此需要机器人具有快速、高精度的控制特性。
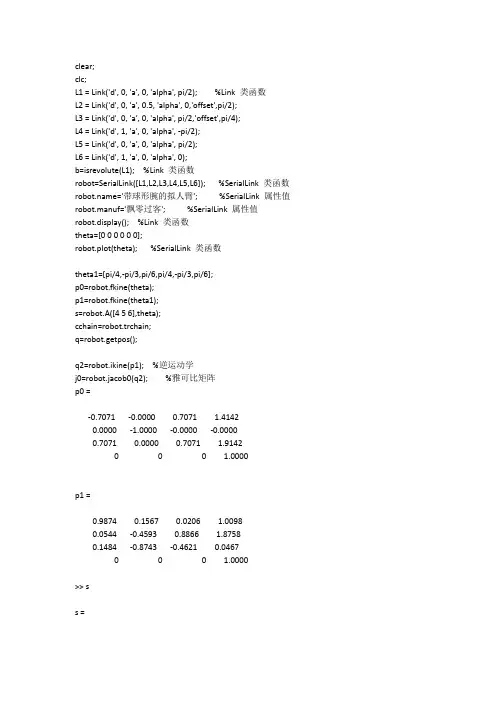
clear;clc;L1 = Link('d', 0, 'a', 0, 'alpha', pi/2); %Link 类函数L2 = Link('d', 0, 'a', 0.5, 'alpha', 0,'offset',pi/2);L3 = Link('d', 0, 'a', 0, 'alpha', pi/2,'offset',pi/4);L4 = Link('d', 1, 'a', 0, 'alpha', -pi/2);L5 = Link('d', 0, 'a', 0, 'alpha', pi/2);L6 = Link('d', 1, 'a', 0, 'alpha', 0);b=isrevolute(L1); %Link 类函数robot=SerialLink([L1,L2,L3,L4,L5,L6]); %SerialLink 类函数='带球形腕的拟人臂'; %SerialLink 属性值robot.manuf='飘零过客'; %SerialLink 属性值robot.display(); %Link 类函数theta=[0 0 0 0 0 0];robot.plot(theta); %SerialLink 类函数theta1=[pi/4,-pi/3,pi/6,pi/4,-pi/3,pi/6];p0=robot.fkine(theta);p1=robot.fkine(theta1);s=robot.A([4 5 6],theta);cchain=robot.trchain;q=robot.getpos();q2=robot.ikine(p1); %逆运动学j0=robot.jacob0(q2); %雅可比矩阵p0 =-0.7071 -0.0000 0.7071 1.41420.0000 -1.0000 -0.0000 -0.00000.7071 0.0000 0.7071 1.91420 0 0 1.0000p1 =0.9874 0.1567 0.0206 1.00980.0544 -0.4593 0.8866 1.87580.1484 -0.8743 -0.4621 0.04670 0 0 1.0000>> ss =1 0 0 00 1 0 00 0 1 20 0 0 1cchain =Rz(q1)Rx(90)Rz(q2)Tx(0.5)Rz(q3)Rx(90)Rz(q4)Tz(1)Rx(-90)Rz(q5)Rx(90)Rz(q6)Tz(1)q =0 0 0 0 0 0q2 =1.0e+04 *0.0003 0.0180 -0.0399 1.1370 0.0002 0.0536j0 =-0.1100 0.0707 0.3577 -0.0114 0.5092 0-0.8329 -0.0448 -0.2267 -0.6224 0.1813 0-0.0000 0.7623 0.3956 -0.1410 -0.8413 0-0.0000 0.5354 0.5354 0.3374 -0.0178 -0.86050.0000 0.8446 0.8446 -0.2139 -0.9751 0.12751.0000 0.0000 0.0000 0.9168 -0.2209 -0.4933作者:fly qq链接:https:///question/41673569/answer/129670927来源:知乎著作权归作者所有,转载请联系作者获得授权。