第5讲逆运动学与速度雅可比
- 格式:ppt
- 大小:818.00 KB
- 文档页数:34

速度雅可比矩阵定义摘要:一、引言二、速度雅可比矩阵的定义1.雅可比矩阵的背景2.速度雅可比矩阵的概念3.速度雅可比矩阵的性质三、速度雅可比矩阵的应用1.机器人运动控制2.自动驾驶技术4.飞行器导航系统四、结论正文:一、引言在现代科技快速发展的背景下,机器人和自动驾驶等智能系统越来越受到人们的关注。
这些系统在运动控制和导航过程中,需要一个关键的数学工具来描述和分析系统的运动特性,那就是雅可比矩阵。
而速度雅可比矩阵作为其重要衍生,具有更丰富的内涵和应用价值。
本文将详细介绍速度雅可比矩阵的定义、性质及其在实际应用中的价值。
二、速度雅可比矩阵的定义1.雅可比矩阵的背景- 雅可比矩阵来源于微积分,用于描述多元函数的切线斜率- 其定义为:J = f/x * x/q,其中f 表示函数,x 表示变量,q 表示参数2.速度雅可比矩阵的概念- 速度雅可比矩阵是在雅可比矩阵的基础上,对时间求导得到的- 定义为:v_j = v_i/q * q/x,其中v_i 表示第i 个变量在q 方向的速度,v_j 表示第j 个变量在x 方向的速度3.速度雅可比矩阵的性质- 速度雅可比矩阵具有行列式为1 的特性- 其元素表示系统各变量在某一方向上的速度变化率三、速度雅可比矩阵的应用1.机器人运动控制- 在机器人运动控制中,速度雅可比矩阵用于描述关节空间的速度变化- 通过计算和调整速度雅可比矩阵,可以实现对机器人的精确控制2.自动驾驶技术- 在自动驾驶中,速度雅可比矩阵用于描述车辆在行驶过程中的速度变化- 通过对速度雅可比矩阵的实时调整,可以实现对车辆的精确驾驶3.飞行器导航系统- 在飞行器导航系统中,速度雅可比矩阵用于描述飞行器在飞行过程中的速度变化- 通过对速度雅可比矩阵的分析,可以优化飞行器的飞行路径和速度四、结论速度雅可比矩阵作为描述系统速度变化的重要工具,在机器人和自动驾驶等领域具有广泛的应用。
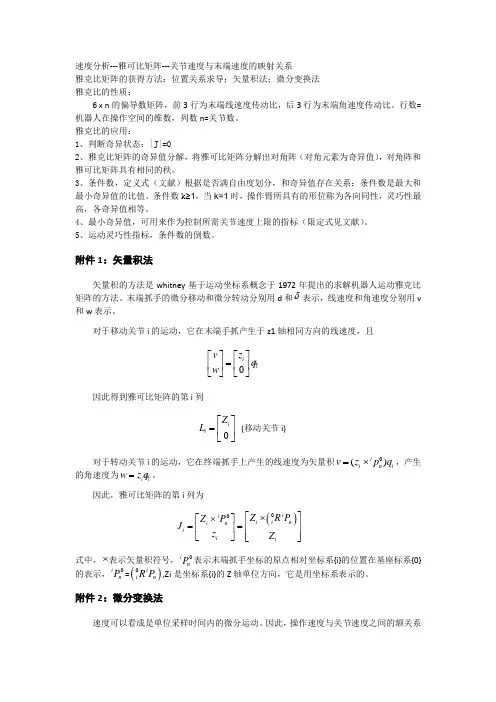
速度分析---雅可比矩阵---关节速度与末端速度的映射关系雅克比矩阵的获得方法:位置关系求导;矢量积法;微分变换法 雅克比的性质:6 x n 的偏导数矩阵,前3行为末端线速度传动比,后3行为末端角速度传动比。
行数=机器人在操作空间的维数,列数n=关节数。
雅克比的应用:1、判断奇异状态:|J|=02、雅克比矩阵的奇异值分解,将雅可比矩阵分解出对角阵(对角元素为奇异值),对角阵和雅可比矩阵具有相同的秩。
3、条件数,定义式(文献)根据是否满自由度划分,和奇异值存在关系:条件数是最大和最小奇异值的比值。
条件数k ≥1,当k=1时,操作臂所具有的形位称为各向同性,灵巧性最高,各奇异值相等。
4、最小奇异值,可用来作为控制所需关节速度上限的指标(限定式见文献)。
5、运动灵巧性指标,条件数的倒数。
附件1:矢量积法矢量积的方法是whitney 基于运动坐标系概念于1972年提出的求解机器人运动雅克比矩阵的方法。
末端抓手的微分移动和微分转动分别用d 和δ表示,线速度和角速度分别用v 和w 表示。
对于移动关节i 的运动,它在末端手抓产生于z1轴相同方向的线速度,且0i i v z qw ⎡⎤⎡⎤=⎢⎥⎢⎥⎣⎦⎣⎦因此得到雅可比矩阵的第i 列0i i Z L ⎡⎤=⎢⎥⎣⎦(移动关节i)对于转动关节i 的运动,它在终端抓手上产生的线速度为矢量积0()i i n i v z p q =⨯,产生的角速度为i i w z q= 。
因此,雅可比矩阵的第i 列为()00ii i in i n i i i Z R P Z P J z Z ⎡⎤⨯⎡⎤⨯==⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦式中,⨯表示矢量积符号,0in P 表示末端抓手坐标的原点相对坐标系{i}的位置在基座标系{0}的表示,0i n P =()0i in R P ,Zi 是坐标系{i}的Z 轴单位方向,它是用坐标系表示的。
附件2:微分变换法速度可以看成是单位采样时间内的微分运动。
机器人动力学雅克比-概述说明以及解释1.引言1.1 概述机器人动力学是研究机器人运动过程中的力学和动力学特性的学科,主要涉及机器人的姿态、速度、加速度、力和力矩等相关物理量。
机器人动力学一直以来都是机器人领域的关键问题之一,对于机器人的运动控制和路径规划具有重要的指导意义。
雅克比矩阵是机器人动力学中一项关键的工具,用于描述机器人多自由度系统中各关节之间的运动传递关系。
通过雅克比矩阵,我们可以计算出机器人末端执行器在给定关节角速度下的线速度和角速度,从而实现对机器人运动的精确控制。
机器人动力学的研究在实际应用中有着广泛的意义。
首先,深入理解机器人的动力学特性可以帮助我们设计出更加高效、灵活的机器人控制算法,从而提升机器人的运动精度和速度。
其次,机器人动力学的研究还可以为机器人路径规划、障碍物避障等问题提供重要的理论支持和指导。
此外,随着机器人应用领域的拓展,如医疗、教育、家庭服务等,机器人动力学的研究也将在未来发挥更加重要的作用。
总结起来,机器人动力学是研究机器人运动特性的学科,雅克比矩阵则是机器人动力学中的重要工具。
通过研究和应用机器人动力学,我们可以实现对机器人运动的精确控制,提升机器人的运动效率和准确性,并且为机器人的应用和发展打下坚实的基础。
未来,机器人动力学的研究将随着机器人技术的不断发展而不断探索新的方向,并为更广泛的机器人应用提供理论支持和指导。
1.2 文章结构文章结构部分的内容应当包括对整篇文章的组织和章节安排进行介绍。
可以按照以下方式编写文章结构的内容:2. 文章结构本文共分为以下几个部分:引言、正文和结论。
2.1 引言部分将对机器人动力学的概念进行概述,介绍机器人动力学的背景和意义。
在此部分还将阐述本文的目的和结构。
2.2 正文部分将重点讨论雅克比矩阵的概念和应用。
首先,将介绍雅克比矩阵的定义和性质,以及其在机器人动力学中的重要作用。
接着,将探讨雅克比矩阵在路径规划、运动控制和力学分析等方面的应用。
速度运动学-雅可比矩阵第4章 速度运动学——雅可比矩阵在数学上,正运动学方程在笛卡尔位置和姿态空间与关节位置空间之间定义了一个函数,速度之间的关系由这个函数的雅可比矩阵来决定。
雅可比矩阵出现在机器人操作的几乎各个方面:规划和执行光滑轨迹,决定奇异位形,执行协调的拟人动作,推导运动的动力学方程,力和力矩在末端执行器和机械臂关节之间的转换。
1.角速度:固定转轴情形k θω&=(k 是沿旋转轴线方向的一个单位向量,θ&是角度θ对时间的倒数) 2.反对称矩阵一个n n ⨯的矩阵Sρ被称为反对称矩阵,当且仅当=+S S T ,我们用)3(so 表示所有33⨯反对称矩阵组成的集合。
如果)3(so S ∈,反对称矩阵满足0=+ji ijs s3,2,1,=j i ,所以iiS =0,S 仅包含三个独立项,并且每个33⨯的反对称矩阵具有下述形式:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=000121323s s s s s s S如果Tzyxa a a a ),,(=是一个3维向量,我们将对应的反对称矩阵)(a S 定义为如下形式:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=000)(xy x zy z a a a a a a a S反对称矩阵的性质1))()()(b S a S b a S βαβα+=+ 向量a 、b 属于3R ,α、β为标量2)p a p a S ⨯=)( 向量a 、b 属于3R ,p a ⨯表示向量叉乘 3))()(Ra S Ra RS T=,左侧表示矩阵)(a S 的一个相似变换,这个公式表明:)(a S 在坐标系中经过R 旋转操作的矩阵表示与反对称矩阵)(a SR 相同,其中)(a SR 对应于向量a 被转过R 这种情形。
4)对于一个n n ⨯的反对称矩阵S ,以及任何一个向量nR X ∈,有0=SX XT旋转矩阵的导数 )(θθSR R d d =公式表明:计算旋转矩阵的R 的导数,等同于乘以一个反对称矩阵S 的矩阵乘法操作。
雅可比矩阵线速度和角速度
(最新版)
目录
1.介绍雅可比矩阵
2.解释线速度和角速度
3.阐述雅可比矩阵与线速度和角速度的关系
4.如何根据旋转矩阵计算欧拉角和角速度之间的雅可比
5.总结
正文
雅可比矩阵是一种数学矩阵,用于描述刚体在三维空间中的旋转。
它可以通过旋转矩阵计算得出,是由旋转矩阵的线性变换得到的。
雅可比矩阵具有以下特性:它是一个正交矩阵,它的行列式等于 1,并且它的逆矩阵等于它的转置矩阵。
线速度和角速度是描述物体旋转的两种方式。
线速度是指物体在单位时间内沿着旋转轴移动的距离,通常用矢量表示。
角速度是指物体在单位时间内绕旋转轴旋转的角度,通常用弧度或度数表示。
雅可比矩阵与线速度和角速度有着密切的关系。
根据雅可比矩阵的定义,它可以通过旋转矩阵计算得出,而旋转矩阵又可以通过线速度和角速度计算得出。
因此,雅可比矩阵可以用于计算物体的线速度和角速度。
如何根据旋转矩阵计算欧拉角和角速度之间的雅可比呢?我们可以使用以下步骤:
1.根据旋转矩阵计算出雅可比矩阵。
2.使用雅可比矩阵计算出欧拉角。
3.根据欧拉角计算出角速度。
在计算机视觉和机器人领域,雅可比矩阵线速度和角速度被广泛应用。
它们可以用于描述物体的运动状态,以及计算物体在不同坐标系下的位置和姿态。
总之,雅可比矩阵是一种重要的数学工具,它可以用于描述物体在三维空间中的旋转,并且可以用于计算物体的线速度和角速度。
逆运动学雅可比矩阵逆运动学雅可比矩阵是机器人学中的重要概念,用于描述机器人末端执行器的运动学性质。
通过逆运动学雅可比矩阵,我们可以推导出机器人在给定末端执行器速度时,关节的运动速度。
本文将介绍逆运动学雅可比矩阵的定义、推导方法和应用场景。
逆运动学雅可比矩阵是描述机器人末端执行器速度与关节速度之间关系的矩阵。
在机器人学中,关节速度是指机器人各个关节的运动速度,末端执行器速度是指机器人末端执行器在笛卡尔坐标系下的速度。
逆运动学雅可比矩阵将这两种速度联系起来,帮助我们理解机器人的运动学特性。
逆运动学雅可比矩阵的定义如下:假设机器人有n个关节,末端执行器在笛卡尔坐标系下的速度为v,关节速度为q̇,则逆运动学雅可比矩阵J的定义如下所示:J = (∂f/∂q̇)⁻¹其中,f表示末端执行器的位置和姿态函数,∂f/∂q̇表示末端执行器速度对关节速度的偏导数。
逆运动学雅可比矩阵的维度为6xN,其中N表示机器人关节数量。
在推导逆运动学雅可比矩阵时,我们可以使用几何法或微分法。
几何法是基于坐标变换和几何关系的推导方法,而微分法则是基于微分运算的推导方法。
这两种方法在不同情况下都有其适用性。
逆运动学雅可比矩阵在机器人学中有广泛的应用。
首先,逆运动学雅可比矩阵可以用于机器人轨迹规划和路径优化。
通过计算机器人末端执行器速度和关节速度的关系,我们可以优化机器人的运动轨迹,使其更加平滑和高效。
逆运动学雅可比矩阵还可以用于机器人的运动控制和力控制。
通过控制机器人的关节速度,我们可以实现对机器人末端执行器的精确控制。
在力控制中,逆运动学雅可比矩阵可以帮助我们估计机器人末端执行器受到的外部力和力矩,并进行相应的控制。
逆运动学雅可比矩阵还可以用于机器人的碰撞检测和避障。
通过计算机器人末端执行器速度和关节速度的关系,我们可以判断机器人是否会与周围环境发生碰撞,并采取相应的避障策略。
总结起来,逆运动学雅可比矩阵是机器人学中的重要概念,用于描述机器人末端执行器的运动学性质。
速度雅可比矩阵定义1. 引言速度雅可比矩阵是数学中的一个重要概念,它在许多领域中都有广泛的应用。
本文将介绍速度雅可比矩阵的定义、性质以及应用,以帮助读者更好地理解和运用这一概念。
2. 速度雅可比矩阵的定义速度雅可比矩阵是描述多变量函数之间的关系的一个矩阵。
它是一个m×n 的矩阵,其中 m 是函数的输出维度,n 是函数的输入维度。
速度雅可比矩阵的元素由函数的偏导数组成,每个元素表示函数输出关于函数输入的变化率。
假设有一个函数 f(x),其中 x 是一个 n 维向量,表示函数的输入变量。
函数f(x) 的输出是一个 m 维向量,表示函数的输出变量。
那么函数 f(x) 的速度雅可比矩阵 J 的定义如下:J = ∂f/∂x = [∂f₁/∂x₁∂f₁/∂x₂ … ∂f₁/∂xₙ] [∂f₂/∂x₁∂f₂/∂x₂ … ∂f₂/∂xₙ] [… … … … ] [∂fₙ/∂x₁∂fₙ/∂x₂ … ∂fₙ/∂xₙ]其中∂f/∂x 表示函数 f(x) 的偏导数,∂fᵢ/∂xₙ 表示函数 f(x) 的第 i 个输出变量关于第 j 个输入变量的偏导数。
3. 速度雅可比矩阵的性质速度雅可比矩阵具有以下几个重要的性质:3.1. 行和列的关系速度雅可比矩阵的行数等于函数的输出维度,列数等于函数的输入维度。
这是由于速度雅可比矩阵的每一行对应函数的一个输出变量,每一列对应函数的一个输入变量。
3.2. 偏导数的计算速度雅可比矩阵的每个元素都可以通过对函数的偏导数进行计算得到。
计算时,可以使用链式法则来求解。
具体而言,对于函数 f(x) 的第 i 个输出变量关于第 j 个输入变量的偏导数,可以通过求解∂fᵢ/∂xₙ = ∂fᵢ/∂y₁ * ∂y₁/∂xₙ + ∂fᵢ/∂y₂ *∂y₂/∂xₙ + … + ∂fᵢ/∂yₙ * ∂yₙ/∂xₙ 的方式得到,其中 y 是函数 f(x) 的中间变量。
3.3. 矩阵的性质速度雅可比矩阵可以视为一个线性变换的表示。