第六讲 机器人运动学逆解.
- 格式:ppt
- 大小:995.00 KB
- 文档页数:49
《机器人导论》机器人逆运动学在机器人技术的广袤领域中,逆运动学是一个至关重要的概念。
简单来说,逆运动学就是要根据机器人末端执行器(比如机械手的夹爪)的期望位置和姿态,来计算出各个关节应该转动的角度或移动的距离。
想象一下,你有一个机械臂,它就像人的手臂一样,由多个关节连接而成。
当你希望它的手能够准确地到达某个特定的位置,并以特定的姿态抓住一个物体时,你就需要知道每个关节应该如何运动。
这就是逆运动学要解决的问题。
为了更好地理解逆运动学,我们先来看一个简单的例子。
假设有一个平面二连杆机械臂,由两个可以旋转的关节连接着两根连杆。
我们知道机械臂末端的位置坐标(x, y),并且知道两个连杆的长度分别为L1 和 L2。
那么,如何求出两个关节的旋转角度呢?我们可以通过几何关系来解决这个问题。
首先,根据末端位置(x, y),可以计算出从原点到末端的距离 R,通过勾股定理 R =√(x²+y²)。
然后,我们可以计算出第一个关节的角度θ1,它等于 arctan(y /x)。
接下来,计算第二个关节的角度θ2 就稍微复杂一些。
我们可以利用余弦定理来得到,经过一系列的数学推导,最终可以求出θ2。
当然,实际的机器人往往要复杂得多,可能有多个关节,甚至是在三维空间中运动。
对于多关节的机器人,解决逆运动学问题的方法也有很多种。
一种常见的方法是解析法。
这种方法通过数学推导和公式计算来直接求解关节变量。
但它的缺点是对于复杂的机器人结构,推导过程可能会非常繁琐,甚至可能无法得到解析解。
另一种方法是数值法。
其中比较常用的是迭代法。
它通过不断地猜测和修正关节变量的值,逐步逼近正确的解。
这种方法的优点是适用性广,但缺点是计算量可能较大,并且可能会陷入局部最优解。
在实际应用中,选择哪种方法取决于机器人的结构和具体的任务需求。
机器人逆运动学的应用场景非常广泛。
在工业生产中,机器人需要准确地抓取和放置零件,这就需要精确的逆运动学计算来控制机器人的动作。

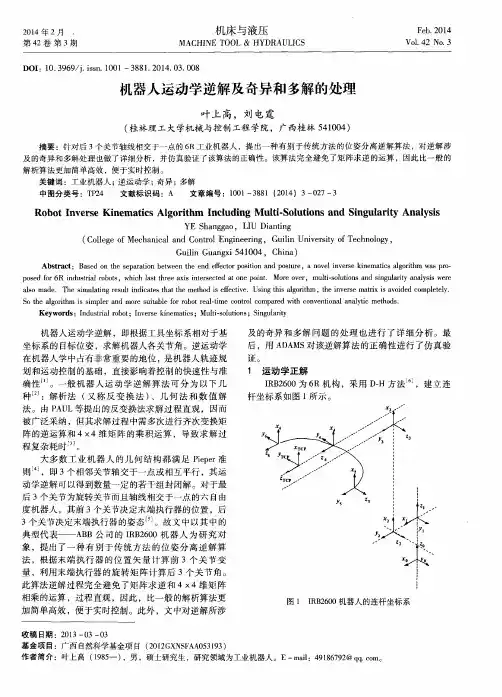
工业机器人运动学逆解的几何求解方法黄晨华【摘要】工业机器人运动学逆解求解方法的不同,其计算量也有很大的差别。
常用的代数法求逆解存在计算繁琐,不易理解等缺点,几何法求逆解具有直观、计算量小的特点。
以5自由度工业机器人为算例,详细介绍了几何法求逆解的过程,总结出了几何法求逆解的一般步骤:首先对机器人的结构进行分析,确定影响机器人末端操作器位置的相关关节,按机器人的结构直接求出各相关关节的逆解,然后利用所求的位置关节的逆解,通过简单的矩阵运算,可求得剩余关节的逆解。
用仿真的方法验证了所求逆解的正确性:假设机器人各关节的转动不受限制,首先让各关节随机转过一定的角度,用机器人正运动学方程,获得机器人任意位姿,然后以此位姿为已知,用所求的逆解求相应的各关节所转过的角度,从而验证了方法的正确性。
【期刊名称】《制造业自动化》【年(卷),期】2014(000)015【总页数】4页(P109-112)【关键词】工业机器人;运动学方程;逆运动学;几何法【作者】黄晨华【作者单位】韶关学院物理与机电工程学院,韶关512005【正文语种】中文【中图分类】TP242.20 引言工业机器人的运动学是工业机器人控制与轨迹规划的基础,其内容包括正运动学和逆运动学。
当给定机器人所有关节转过的角度时,可以通过机器人的正动学方程来确定其末端操作器的位解;当已知机器人末端操作器的位置时,则可根据运行学逆解获得各关节需转过后角度。
机器人运动学建模的标准方法,即D-H建模,可以很方便地得到机器人的正运动学方程,而要获得机器人的逆运动学方程,则难度较大,求解的方法可以分成两大类:数值解和封闭解。
Tsai[2]等研究了通用的6自由度和5自由度的机械臂的数值解,Nakamura[3]等研究了适用了机器人控制的带有奇点鲁棒控制的数值逆解,Baker[4]等研究了冗余机械臂的数值逆解,数值解的最大不足就是计算时比较耗时,对系统造成较大的负担。
封闭解是基于解析形式的解法,其又可分为代数法和几何法,用代数法求逆解在很多机器人经典教材和文献中都有详细的论述[5~7],在此不作具体讨论,刘达[8]等为了使机器人获得更好的实时性,提出了一种解析和数值相结合的机器人逆解算法,陈庆诚[9]等提出基于旋量理论的逆运动学子问题求解算法。
冗余机器人运动学逆解1. 引言冗余机器人是指具有超过所需自由度数量的机器人系统。
在工业自动化领域,冗余机器人具有广泛的应用,能够完成复杂的任务,如装配、焊接、拾取等。
其中,运动学逆解是实现冗余机器人精确控制的关键技术之一。
2. 冗余机器人的运动学冗余机器人的运动学描述了机器人末端执行器的运动规律。
在运动学中,我们关注的是机器人的位置和姿态,即机器人末端执行器的坐标和姿态。
冗余机器人的运动学方程可以用来描述机器人各关节的角度与机器人末端执行器的位置和姿态之间的关系。
3. 运动学逆解的意义运动学逆解是指根据机器人末端执行器的位置和姿态,计算出机器人各关节的角度。
运动学逆解的求解对于实现精确控制非常重要。
通过运动学逆解,可以将任务空间的要求转化为关节空间的控制量,从而实现冗余机器人的精确运动。
4. 运动学逆解的挑战冗余机器人的运动学逆解求解存在一定的挑战。
首先,由于冗余机器人具有多余的自由度,存在无数种解。
因此,需要找到最优解。
其次,运动学逆解的求解过程需要考虑机器人的约束条件,如关节角度限制、碰撞检测等。
最后,由于机器人关节之间存在耦合,求解过程可能会涉及到非线性方程组的求解,增加了计算的复杂性。
5. 运动学逆解的求解方法存在多种方法用于求解冗余机器人的运动学逆解。
常用的方法包括解析方法和数值方法。
解析方法是通过解析求解运动学方程,得到机器人关节角度的解析解。
数值方法是通过迭代计算的方式,逐步逼近机器人关节角度的解。
常用的数值方法有雅可比转置法、逆雅可比法、牛顿-拉夫逊法等。
6. 解析方法的优势和局限性解析方法具有计算速度快、精度高的优势。
通过解析方法求解运动学逆解可以得到精确解析解,适用于一些简单的冗余机器人系统。
然而,解析方法只适用于具有特殊结构和运动规律的机器人系统,对于复杂的冗余机器人系统,解析方法的求解可能会非常困难甚至无法实现。
7. 数值方法的特点和应用数值方法适用于各种类型的冗余机器人系统,具有广泛的应用。
多臂协同焊接机器人运动学逆解及误差分析多臂协同焊接机器人是一种能够协同工作的焊接机器人系统,可以同时由多个机臂进行焊接操作。
在多臂协同焊接机器人中,机器人的运动学逆解是非常重要的一部分,它能够确定每个机臂的关节角度,以实现期望的末端执行器位置和姿态。
本文将介绍多臂协同焊接机器人运动学逆解的原理和误差分析。
首先,我们来介绍多臂协同焊接机器人的运动学逆解原理。
多臂协同焊接机器人通常采用串联平行机构结构,即由多个平行机构组成的机械臂。
每个机械臂由多个关节连接而成,可以实现在关节空间和工作空间中的运动。
运动学逆解是通过已知末端执行器的位置和姿态,来求解每个关节的角度。
在多臂协同焊接机器人中,可以使用雅克比矩阵法来进行运动学逆解。
雅克比矩阵描述了末端执行器位姿和关节角度之间的关系,可以通过雅克比矩阵和末端执行器位姿的变化来求解关节角度的变化。
误差分析是对多臂协同焊接机器人运动学逆解的误差进行分析和评估。
运动学逆解误差包括两部分:传感器误差和运动学模型误差。
传感器误差是由于传感器测量的末端执行器位姿存在误差而导致的逆解误差。
可以通过校准传感器和采用更精确的传感器来减小传感器误差。
运动学模型误差是由于机器人运动学模型的简化导致的逆解误差。
可以通过优化运动学模型和增加机器人的自适应控制算法来减小运动学模型误差。
此外,多臂协同焊接机器人的运动学逆解还需要考虑工作空间限制和运动约束。
工作空间限制是机器人末端执行器在三维空间中能够达到的位置和姿态的限制。
运动约束是机器人运动过程中需要满足的约束条件,如碰撞检测和避障等。
综上所述,多臂协同焊接机器人的运动学逆解及误差分析是实现机器人精确运动控制的重要环节。
通过合理选择逆解算法、减小传感器误差和优化运动学模型,可以提高机器人的运动精度和控制性能,进一步提升多臂协同焊接机器人的工作效率和焊接质量。
工业六轴机器人运动学逆解工业六轴机器人是一种常见的工业机器人类型,具有广泛的应用场景。
在实际应用中,控制工业六轴机器人的运动是非常重要的,而运动学逆解就是解决这个问题的方法之一。
运动学逆解是指根据机器人的末端执行器的位置和姿态,计算出各个关节的角度。
通过运动学逆解,可以实现对机器人运动的精确控制,从而完成特定的任务。
在工业六轴机器人中,每个关节都可以进行旋转运动,因此机器人的运动学模型可以简化为一个连续的旋转链。
我们可以使用一种称为D-H参数的方法来描述机器人的运动学模型。
D-H参数是一种用于描述机器人关节的坐标系和相对运动的方法。
每个关节都有一个坐标系,它的原点位于前一个关节的旋转轴上,坐标系的z轴与关节的旋转轴平行,x轴垂直于z轴。
通过定义每个关节的坐标系,我们可以建立起整个机器人的坐标系链。
在运动学逆解的计算中,我们需要使用到正运动学方程和逆运动学方程。
正运动学方程是指根据关节角度计算机器人末端执行器的位置和姿态。
通过逐个计算每个关节的变换矩阵,我们可以将关节坐标系的变换叠加起来,得到整个机器人的变换矩阵。
然后,我们可以从变换矩阵中提取出末端执行器的位置和姿态。
逆运动学方程是指根据末端执行器的位置和姿态计算出各个关节的角度。
逆运动学方程的计算比较复杂,需要使用到三角函数的反函数和矩阵运算等方法。
一般来说,逆运动学方程存在多解的情况,我们需要根据具体的应用需求选择合适的解。
在实际应用中,运动学逆解是机器人控制的基础。
通过计算出关节角度,我们可以实现对机器人的精确控制,完成各种复杂的任务。
例如,在装配任务中,我们可以通过运动学逆解计算出机器人的关节角度,使得机器人可以准确地抓取、组装零部件。
运动学逆解还可以用于路径规划和避障等问题。
通过运动学逆解,我们可以计算出机器人在空间中的运动轨迹,从而实现路径规划。
同时,我们还可以根据机器人的运动学模型和环境信息,计算出机器人在避障过程中各个关节的角度,实现智能避障。
clear;clc;L1 = Link('d', 0, 'a', 0, 'alpha', pi/2); %Link 类函数L2 = Link('d', 0, 'a', 0.5, 'alpha', 0,'offset',pi/2);L3 = Link('d', 0, 'a', 0, 'alpha', pi/2,'offset',pi/4);L4 = Link('d', 1, 'a', 0, 'alpha', -pi/2);L5 = Link('d', 0, 'a', 0, 'alpha', pi/2);L6 = Link('d', 1, 'a', 0, 'alpha', 0);b=isrevolute(L1); %Link 类函数robot=SerialLink([L1,L2,L3,L4,L5,L6]); %SerialLink类函数='带球形腕的拟人臂'; %SerialLink属性值robot.manuf='飘零过客'; %SerialLink属性值robot.display(); %Link 类函数theta=[0 0 0 0 0 0];robot.plot(theta); %SerialLink类函数theta1=[pi/4,-pi/3,pi/6,pi/4,-pi/3,pi/6];p0=robot.fkine(theta);p1=robot.fkine(theta1);s=robot.A([4 5 6],theta);cchain=robot.trchain;q=robot.getpos();q2=robot.ikine(p1); %逆运动学j0=robot.jacob0(q2); %雅可比矩阵p0 =-0.7071 -0.0000 0.7071 1.4142 0.0000 -1.0000 -0.0000 -0.00000.7071 0.0000 0.7071 1.9142 0 0 0 1.0000p1 =0.9874 0.1567 0.0206 1.0098 0.0544 -0.4593 0.8866 1.8758 0.1484 -0.8743 -0.4621 0.04670 0 0 1.0000 >>ss =1 0 0 00 1 0 00 0 1 20 0 0 1cchain =Rz(q1)Rx(90)Rz(q2)Tx(0.5)Rz(q3)Rx(90)Rz(q4)Tz(1)Rx(-90)Rz(q5)Rx(90)Rz(q6)Tz(1)q =0 0 0 0 0 0q2 =1.0e+04 *0.0003 0.0180 -0.0399 1.1370 0.0002 0.0536j0 =-0.1100 0.0707 0.3577 -0.0114 0.5092 0 -0.8329 -0.0448 -0.2267 -0.6224 0.1813 0-0.0000 0.7623 0.3956 -0.1410 -0.8413 0-0.0000 0.5354 0.5354 0.3374 -0.0178 -0.86050.0000 0.8446 0.8446 -0.2139 -0.9751 0.12751.0000 0.0000 0.0000 0.9168 -0.2209 -0.4933作者:fly qq链接:来源:知乎著作权归作者所有,转载请联系作者获得授权。