电液比例位置控制系统的新型PID控制算法研究
- 格式:pdf
- 大小:242.14 KB
- 文档页数:4
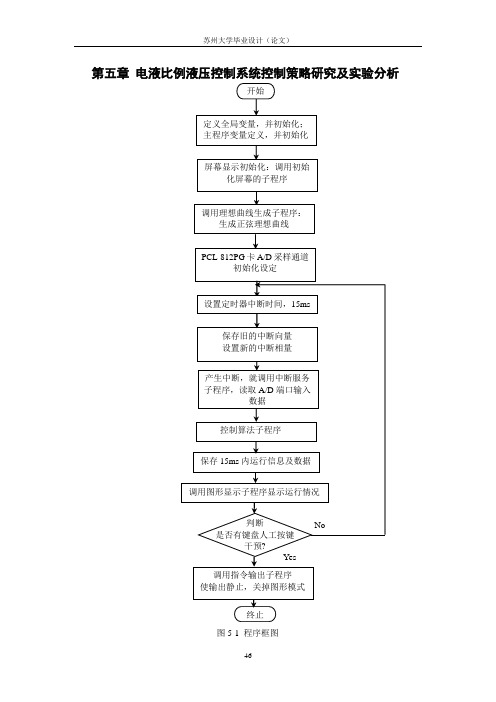
第五章电液比例液压控制系统控制策略研究及实验分析图5-1 程序框图§5.1 电液比例液压控制系统的增量式PID 控制研究由第二章分析可知,Beringer 生产的电液比例液压控制系统的许多硬件参数都不能准确确定和许多不确定因素的影响,要想准确用数学模型来描述该系统的动态特性是非常困难的,因此提出利用PID 算法对系统进行控制。
由于PID 控制器不需要知道控制对象的具体传递函数,算法简单、易于调节等优点,在工业控制中得到了广泛应用。
在前一章分析电液比例液压控制系统的动态模型时,对系统模型的PID 控制的仿真结果表明,由于本系统具有较好的开环稳定性,而系统的变化较为平缓,所以应用PID 控制算法就可能获得较好的输出。
在本文的实验中,利用增量式PID 控制算法,对系统在不同的温度、压力等工作条件下的运行进行了实验研究,大量实验表明该算法的有效性。
在实验中采用了增量式的PID 控制算法。
其控制系统原理框图如图5-2所示:PID 控制器是一种线性控制器,它根据给定值r (t) 与实际输出值c (t)构成控制偏差:)15()()()(--=t t t c r e其控制规律:)25(1)()()(-⎥⎦⎤⎢⎣⎡++=⎰tD t I t P t dt dt T dt e T e K u式中 K P : 比例系数;T I : 积分时间常数;T D : 微分时间常数。
简单说来,PID 控制器各校正环节的作用如下:1.比例环节:即时成比例地反映控制系统的偏差信号 e (t),偏差一旦产生,图5-2 控制系统原理框图控制器立即产生控制作用,以减少偏差。
增大比例系数可加快系统响应,有利于减小静差,但会是系统有较大的超调,产生振荡,稳定性变坏。
2.积分环节:主要用于消除静差,提高系统的无差度。
积分作用的强弱取决于积分时间常数T I ,T I 越大,积分作用越弱,可使超调和振荡下降,但消除系统静差也减慢。
3.微分环节:能反映偏差信号的变化趋势(变化速率),并能在偏差信号值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。

浅析基于PID算法的电液伺服阀速度控制系统的研究摘要:本文主要是结合液压传动技术和自动控制技术,设计一种基于pid算法的电液伺服阀速度控制器。
液压系统在机械传动方面有着十分重要的应用,尤其是其具有传动过程中工作稳定、传递功率负荷大、传动能量方向灵活可控、调节控制方便等等优势,非常适合在机械制造、工程机械、大型交通工具等场合应用。
关键词:plc;控制系统;pid;电液伺服系统是液压自动控制领域中的一门重要研究技术,由于其具有良好、快速、高精度的控制效果和能量,该技术其应用面非常广泛。
近年来,随着计算机技术的迅猛发展和在自动控制领域的应用,如何将计算机控制技术应用于液压伺服控制已经成为人们研究的重点和热点。
本文主要讲的是如何设计出一种基于pid算法的电液伺服速度控制系统。
1、系统工作原理及参数电液伺服阀速度控制系统是通过电液伺服阀控制两柱压力机匀速上升或下降的高精度控制系统,由电气控制部分和液压驱动部分组成。
系统工作原理如下:当上位计算机实现上升或下行功能时,对控制器发出下行指令,控制器根据位置传感器及速度反馈回路的信号输出相应的控制信号,经伺服阀放大器驱动电液伺服阀输出相应流量,在电机、液压回路系统等相关执行机构作用下,两柱压力机油缸匀速上升或下降;系统的控制核心为由控制器、电液伺服阀、反馈回路构成的闭环控制系统。
1.1 伺服阀电液伺服阀速度控制系统的核心元件是伺服阀,系统中采用的伺服阀是中船重工上海704所生产的csdy1/2型伺服阀。
csdy1csdy2电液伺服阀结构牢固、分辨率极高、控制精度高适用于各领域的高精度电液伺服系统。
如:造船工业、航天工业、航空工业、重工业、轻、纺工业,以及农业机械液压伺服系统。
csdy1csdy2电液伺服阀工作时,高压油ps一路通过滤油器进入射流管喷嘴,另一路进入阀芯和阀套组成的通路。
当无信号电流时,阀处于零位,无流量输出。
当有控制信号电流输入时,使射流管喷嘴偏转(设顺时针),接受器左腔压力上升,右腔压力下降,阀芯在压差作用下右移,其油路ps-a-1负载-2-c-p。

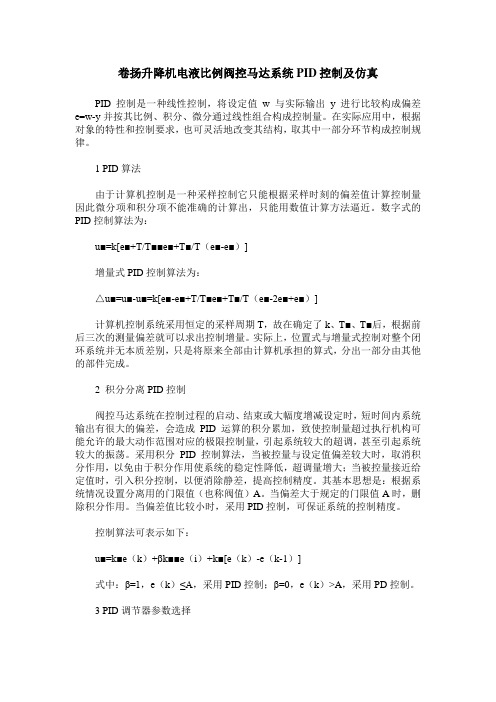
卷扬升降机电液比例阀控马达系统PID控制及仿真PID控制是一种线性控制,将设定值w与实际输出y进行比较构成偏差e=w-y并按其比例、积分、微分通过线性组合构成控制量。
在实际应用中,根据对象的特性和控制要求,也可灵活地改变其结构,取其中一部分环节构成控制规律。
1 PID算法由于计算机控制是一种采样控制它只能根据采样时刻的偏差值计算控制量因此微分项和积分项不能准确的计算出,只能用数值计算方法逼近。
数字式的PID控制算法为:u■=k[e■+T/T■■e■+T■/T(e■-e■)]增量式PID控制算法为:△u■=u■-u■=k[e■-e■+T/T■e■+T■/T(e■-2e■+e■)]计算机控制系统采用恒定的采样周期T,故在确定了k、T■、T■后,根据前后三次的测量偏差就可以求出控制增量。
实际上,位置式与增量式控制对整个闭环系统并无本质差别,只是将原来全部由计算机承担的算式,分出一部分由其他的部件完成。
2 积分分离PID控制阀控马达系统在控制过程的启动、结束或大幅度增减设定时,短时间内系统输出有很大的偏差,会造成PID运算的积分累加,致使控制量超过执行机构可能允许的最大动作范围对应的极限控制量,引起系统较大的超调,甚至引起系统较大的振荡。
采用积分PID控制算法,当被控量与设定值偏差较大时,取消积分作用,以免由于积分作用使系统的稳定性降低,超调量增大;当被控量接近给定值时,引入积分控制,以便消除静差,提高控制精度。
其基本思想是:根据系统情况设置分离用的门限值(也称阀值)A。
当偏差大于规定的门限值A时,删除积分作用。
当偏差值比较小时,采用PID控制,可保证系统的控制精度。
控制算法可表示如下:u■=k■e(k)+βk■■e(i)+k■[e(k)-e(k-1)]式中:β=1,e(k)≤A,采用PID控制;β=0,e(k)>A,采用PD控制。
3 PID调节器参数选择选择调节器的参数,必须根据工程的具体问题来考虑。

基于PID的电液位置伺服系统分析摘要电液位置伺服系统是一种由电信号处理装置和液压动力机构组成反馈控制系统。
它综合了电气和液压两方面的优点,具有控制精度高、响应速度快、输出功率大、信号处理灵活、易于实现各种参量的反馈等优点。
其应用已遍及国民经济的各个领域。
本文主要通过matlab软件中的simulink工具,对电液位置伺服系统进行PID调节,并且利用临界比例度法进行参数整定,采用微分先行的方法对PID控制器进行改良,最终使系统的快速性、稳定性、准确性明显提高。
关键词电液位置伺服系统; PID控制; 临界比例度法; 微分先行Analysis of Electro-hydraulic Position Servo System Based onPIDABSTRACT Electro-hydraulic position servo system is a signal processing unit and the hydraulic power agencies feedback control system. It combines both electrical and hydraulic advantages of high control precision, fast response, high output power, signal processing, flexible, easy to implement various parameters of the feedback and so on. Its application has been throughout all areas of the national economy. In this paper, by using simulink software tools, electro-hydraulic position servo system PID control, and the use of critical ratio method for parameter tuning, using the method of differential forward PID controller for improvement, and ultimately make the system fast, stability, significantly improved accuracy.Key words electro-hydraulic position servo system; PID control; critical ratio method; differential forward1.引言电液伺服系统是一种由电信号处理装置和液压动力机构组成的反馈控制系统。
电液比例位置系统复合控制及相关研究一、概述电液比例位置系统作为现代工业控制领域的重要组成部分,广泛应用于各种机械设备和自动化生产线中。
该系统通过电液转换装置将电信号转换为液压动力,实现对执行机构的位置、速度和力等参数的精确控制。
随着工业技术的不断发展,对电液比例位置系统的性能要求也越来越高,复合控制技术的研究和应用显得尤为重要。
复合控制是指将两种或多种不同的控制方法结合在一起,以充分利用各种控制方法的优点,提高系统的整体性能。
在电液比例位置系统中,复合控制可以有效地解决单一控制方法难以处理的复杂问题,如非线性、时变性和不确定性等。
通过合理地设计复合控制策略,可以实现对系统性能的优化和提升,满足实际应用的需求。
本文旨在深入研究电液比例位置系统的复合控制技术,探讨不同控制方法之间的融合方式和优化策略。
我们将对电液比例位置系统的基本原理和特性进行介绍,为后续的研究奠定基础。
我们将分析现有复合控制技术在电液比例位置系统中的应用现状,指出其存在的问题和不足之处。
接着,我们将提出一种新型的复合控制策略,并详细阐述其设计思路、实现方法和性能特点。
我们将通过实验验证该复合控制策略的有效性,并与其他控制方法进行对比分析,以证明其在提高系统性能方面的优越性。
通过对电液比例位置系统复合控制技术的深入研究,我们期望能够为相关领域的研究人员和工程师提供有益的参考和借鉴,推动该技术的进一步发展和应用。
1. 电液比例位置系统的概述电液比例位置系统,作为一种先进的控制技术,在液压和电气领域中发挥着重要的作用。
它结合了电气信号的控制灵活性与液压系统的动力传递能力,实现了对液压装置流量、压力和方向的精确控制。
这种系统在工业、农业以及其他多个领域具有广泛的应用前景,如机械加工、钢铁生产、工程机械、船舶设备、汽车工程等。
电液比例位置系统主要由电气系统、比例电磁阀、液压装置以及反馈装置等四部分构成。
电气系统负责控制电气信号的发射和接收,而比例电磁阀则是实现电气信号到液压信号转换的关键部件。