DC-DC变换器的动态建模和控制
- 格式:ppt
- 大小:3.45 MB
- 文档页数:73

I. 引言现代电子设备和电子系统通常由高密度、高速度的电路组成,这样的电路具有低压大电流的特性。
为了带动这样的负载,电源必须能在一个很宽的电流范围内提供稳定的电压,其稳态及暂态的整流特性也必须相当出色。
建模与仿真在现代DC-DC变换器的设计过程中扮演了很重要的角色。
它能让工程师在制作实际电路之前评估变换器的性能。
因此,我们可以在设计之初就发现并更正可能存在的设计缺陷,以提高生产率并节约生产本钱。
DC-DC变换器的建模和仿真在过去的十年里是一个热点[1]。
一般来说,变换器建模方法有两种:开关模型、平均模型。
在开关模型中,模型仿真了变换器的开关动作,仿真波形是包含了开关纹波的波形,这与实际看到的波形很相似。
而平均模型只仿真了变换器的平均特性,仿真波形也是平滑而连续的,这个波形代表了平均值而非实际值。
众所周知,对平均模型进展仿真要比开关模型快。
因此,平均模型常用于变换器动态性能的总体评估。
在过去,平均模型的仿真主要是用SPICE来完成的[2]。
SPICE的缺点在于仿真的对象必须是电路的形式,如果模型原型是复杂的方程式,那么要花费很大的精力将其转换成等效的电路形式。
尽管SPICE的新版本也开场支持建立纯数学模型,但是改善仍然有限。
最近,参考文献[3]介绍了一个不错的可以用在DC-DC变换器建模和仿真方面的工具——SIMULINK[4]。
然而,作者使用的变换器模型是线性化的,在大信号条件下,这个模型的仿真效果并不理想。
为了克制上述缺点,本论文讨论了如何应用SIMULINK在大信号条件下对DC-DC变换器进展平均模型的建模与方针。
本文拓展了文献[3]的研究,在变换器的功率和控制局部使用了非线性化的模型,从而改良了模型在大信号条件下的仿真效果。
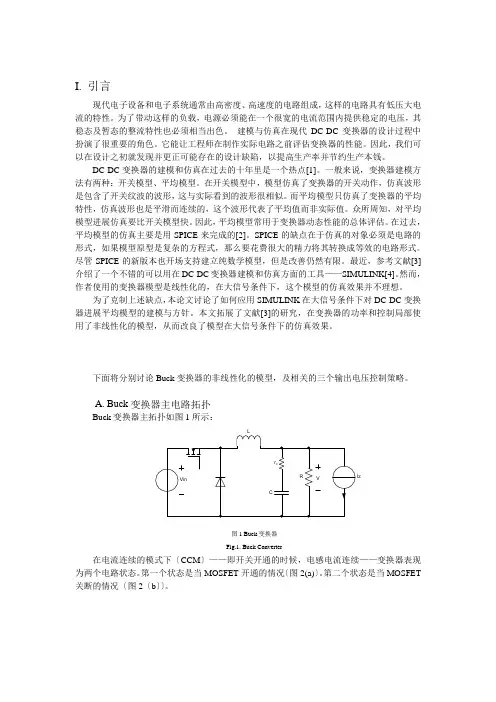
下面将分别讨论Buck变换器的非线性化的模型,及相关的三个输出电压控制策略。
A. Buck变换器主电路拓扑Buck变换器主拓扑如图1所示:图1 Buck变换器Fig.1. Buck Converter在电流连续的模式下〔CCM〕——即开关开通的时候,电感电流连续——变换器表现为两个电路状态。

DC―DC开关变换器的建模与非线性行为控制一、Buck-Boost变换器工作原理Buck-Boost变换器电路如图1(a)所示。
Buck-Boost变换器功率级工作原理:当功率开关管S导通时,二极管D受反向电压关断,电感电流>上升。
当上升达到参考电流I时,S断开,>通过D进行续流,此时D导通。
如果在下一个时钟脉冲到来时大于0,则电路工作于连续导电模式(CCM),电路波形图1(b)所示;如果在下一个时钟脉冲到来前已降到0,则电路工作于不连续导电模式(DCM),此时开关S和D都关断,电路波形图1(c)所示。
控制级工作原理:将电感电流的采样值与参考电流I输入比较放大器A(其放大系数为K),得到误差信号e=(I-),该误差信号与锯齿波信号相比较,控制输出信号调节占空比D,进而控制开关S的导通时。
二、Buck-Boost变换器非线性行为在进行Buck-Boost变换器非线性行为分析前,做如下假设:(1)负载上的电压V恒定不变,可看作是一个电压源。
在实际电路中只要滤波电容足够大,这一假设是成立的;(2)变换器中所有器件均为理想器件,忽略其寄生参数。
1、连续导电模式在t=t(n=0,1,2,…)时刻,S闭合。
此时系统的微分方程为:(1)在t=t+DT(n=0,1,2,…)(D为系统的占空比)时刻,S 断开,此时系统的微分方程为:(2)当电感电流达到参考电流值时,电路开关S由导通转换为关断。
电感电流在时刻的采样值与基准电流I输入比较器A,A的反馈倍数为K,系统的采样控制方程为:(3)en输入PWM控制器,与锯齿波相比较,形成的占空比规律如下:(4)采用A开关映射的数据采样方法,即在开关S闭合的时刻采样数据。
设在t=tn(n=0,1,2…)和t=tn+T (n=0,1,2…)时刻电感电流采样值分别为in,in+1,则系统的离散方程为:(5)将式(3)和式(4)代入式(5),得:(6)其中:式(6)即为系统CCM的离散迭代方程。
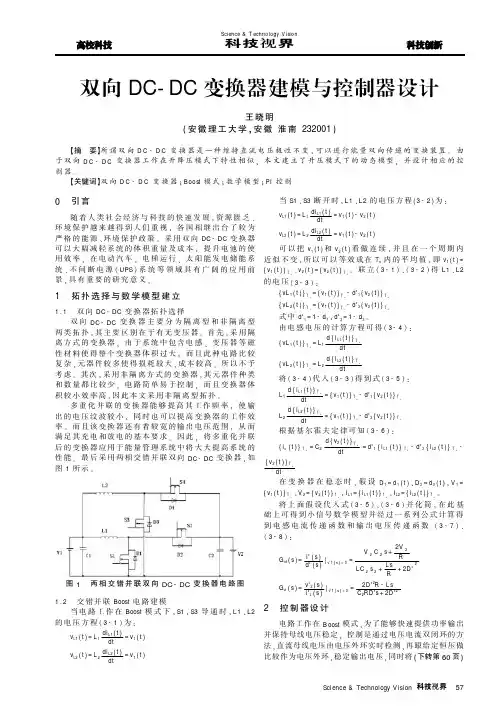
混合动力汽车双向DC/DC变换器建模与控制双向DC/DC变换器是混合动力汽车中的关键技术之一,它主要的功能是使得电动机和储能元件之间的能量双向流动,实现汽车在行驶过程中对能量的回收。
首先分析了混合动力汽车双向DC/DC变换器的作用及其基本工作原理,然后,在不同工作模式下,通过分析确立了相应的控制目标,并分别建立了不同工作模式下的数学模型,进行双向DC/DC变换器控制器的研究与设计,最后,对提出的控制方案,通过仿真进行验证。
标签:双向DC/DC变换器混合动力汽车控制0 引言本文选择混合动力汽车中常用的双向Buck/Boost变换器作为研究对象,分析了其拓扑结构和工作原理,阐述了双向Buck/Boost变换器的数学建模及控制器的设计,重点分析了其启动模式、驱动/再生制动模式、充电模式的数学建模及控制器的设计。
最后对不同模式下的双向Buck/Boost变换器控制器的设计进行仿真验证。
1 双向Buck/Boost变换器的拓扑结构和工作原理1.1 拓扑结构图1表示了双向Buck/Boost变换器的拓扑结构。
输入侧为动力电池,输出侧用来驱动电机,当工作在Boost模式时,动力电池向负载提供能量;当工作在Buck模式时,负载向动力电池提供能量,从而实现能量的双向流动。
1.2 工作原理混合动力汽车的运行模式主要可以分为四种,启动模式,驱动模式,再生制动模式和充电模式。
当混合动力汽车启动瞬间,内燃机不工作,动力电池放电来启动汽车,此时,双向Buck/Boost电路的负载是启动电阻R;当混合动力汽车处于加速爬坡或重载的情况时,工作于驱动模式,动力电池经过双向Buck/Boost电路输出能量,驱动内燃机工作;当混合动力汽车处于减速制动的情况时,属于再生制动模式,此时能量经过Buck/Boost电路被动力电池回收;当混合动力汽车的电池能量不足,需要充电时,将工作于充电模式,负载经过Buck/Boost电路向动力电池充电。
DCDC开关变换器的建模分析与研究DC-DC开关变换器是一种将直流电能转换为可变电压或可变电流的电力转换设备。
它通过开关管的开关操作,将输入直流电源通过开关操作从电源中提取电能,经过滤波和调节后,输出所需的电压或电流。
DC-DC开关变换器的建模分析与研究主要包括以下几个方面:1.基本电路模型:DC-DC开关变换器一般由开关管、电感、电容和二极管等基本元件组成。
建立这些元件之间的电路连接关系,可以得到DC-DC开关变换器的基本电路模型。
2.状态空间分析:通过建立DC-DC开关变换器的状态空间方程,可以对系统的状态进行描述和分析。
状态空间分析可以帮助研究者深入了解系统的动态特性,比如系统的阻尼、振荡频率等。
状态空间分析还可以进行系统控制设计和参数优化等工作。
3.均衡分析:DC-DC开关变换器在不同工作状态下,系统的电压和电流会有不同的变化特性。
通过对系统的均衡分析,可以确定系统在不同工作状态下的电压、电流等数据。
这对于系统的稳定性分析、能量传输效率的研究以及开发可靠的控制方法等方面都有重要意义。
4.动态响应分析:DC-DC开关变换器在不同负载和输入条件下,系统的动态响应特性会有所不同。
通过对系统的动态响应进行分析,可以了解系统对负载变化和输入电压波动等的适应能力,为系统的控制方法设计提供依据。
5.控制策略研究:DC-DC开关变换器的控制策略研究是建模分析的重要内容。
不同的控制策略可以对系统的性能产生不同的影响。
常用的控制策略包括比例积分控制(PI控制)、模糊控制、模型预测控制(MPC)等。
通过对不同控制策略的比较和分析,可以选择适合特定应用场景的最佳控制策略。
总之,DC-DC开关变换器的建模分析与研究对于深入理解系统的电气特性、设计高效可靠的控制方法以及提高系统的性能都具有重要意义。
在建模分析与研究的过程中,需要考虑系统的基本电路结构、状态空间方程、均衡分析、动态响应特性和控制策略等多个方面的内容,通过综合分析和比较,可以得到对系统性能和工作特性有较好理解的研究成果。