倒立摆分段控制方法_贾欣乐
- 格式:pdf
- 大小:1.08 MB
- 文档页数:7
摘要:倒立摆系统是一个典型的多变量、非线性、强藕合和快速运动的自然不稳定系统。
因此倒立摆在研究双足机器人直立行走、火箭发射过程的姿态调整和直升机飞行控制领域中有重要的现实意义,相关的科研成果己经应用到航天科技和机器人学等诸多领域。
本文围绕一级倒立摆系统,采用模糊控制理论研究倒立摆的控制,先是理论上的计算,然后建模,最后在MATLAB/Simulink下仿真,验证了可行性。
关键词:倒立摆,模糊控制,MATLAB仿真第一章绪论1.1 倒立摆系统的重要意义倒立摆系统是研究控制理论的一种典型实验装置,具有成本低廉,结构简单,物理参数和结构易于调整的优点,是一个具有高阶次、不稳定、多变量、非线性和强藕合特性的不稳定系统。
在控制过程中,它能有效地反映诸如可镇定性、鲁棒性、随动性以及跟踪等许多控制中的关键问题,是检验各种控制理论的理想模型。
迄今人们已经利用经典控制理论、现代控制理论以及各种智能控制理论实现了多种倒立摆系统的控制稳定。
倒立摆主要有:有悬挂式倒立摆、平行倒立摆、环形倒立摆、平面倒立摆;倒立摆的级数有一级、二级、三级、四级乃至多级;倒立摆的运动轨道可以是水平的,也可以是倾斜的:倒立摆系统己成为控制领域中不可或缺的研究设备和验证各种控制策略有效性的实验平台。
同时倒立摆研究也具有重要的工程背景:如机器人的站立与行走类似双倒立摆系统;火箭等飞行器的飞行过程中,其姿态的调整类似于倒立摆的平衡等等。
因此对倒立摆控制机理的研究具有重要的理论和实践意义。
1.2 倒立摆系统的控制方法自从倒立摆产生以后,国内外的专家学者就不断对它进行研究,其研究主要集中在下面两个方面:(1)倒立摆系统的稳定控制的研究(2)倒立摆系统的自起摆控制研究而就这两方面而言,从目前的研究情况来看,大部分研究成果又都集中在第一方面即倒立摆系统的稳定控制的研究。
目前,倒立摆的控制方法可分如下几类: (1)线性理论控制方法将倒立摆系统的非线性模型进行近似线性化处理获得系统在平衡点附近的线性化模型,然后再利用各种线性系统控制器设计方法得到期望的控制器。
倒立摆系统的主要控制方法控制理论自诞生之日起至今主要经历了经典控制理论、现代控制理论和人工智能控制理论等几个阶段。
伴随着控制理论的不断发展,对倒立摆的控制也出现了采用经典控制理论、现代控制理论和人工智能控制理论等多种控制理论的方案和控制方法,并均实现了实物实验的成功。
经典控制理论提供了解决单输入单输出系统的控制方法。
利用牛顿第二运动定律对倒立摆系统进行力学分析,建立小车在水平运动和摆杆在垂直位置上的动力学方程,并进行合理的线性化,拉氏变换,得出系统的传递函数,从而得到零极点分布情况。
根据使闭环系统能稳定工作的思想设计控制器,需引入适当的反馈,使闭环系统特征方程的根都位于左半平面上。
用经典控制理论的频域法设计非最小相位系统的控制器并不需要十分精确的被控对象的数学模型,因为只要控制器使系统具有充分大的相位裕量就能获得系统参数在很宽范围内的稳定性。
文献介绍了黄永宜选用经典控制理论的频域法实现了单级倒立摆的稳定控制。
现代控制理论采用状态空间法,把经典控制理论中的高阶定常微分方程转换为一阶微分方程组,用来描述系统的动态过程。
这种方法可以解决多输入多输出问题,系统可以是线性的、定常的,也可以是非线性的、时变的。
与经典控制理论相比,现代控制理论具有较强的系统性,从分析、设计、到综合都有比较完整的理论和方法。
利用H∞状态反馈方法、极点配置法和最优状态调节器方法都可以实现对二级倒立摆的控制。
基于H∞状态反馈方法的二级倒立摆控制方案:针对倒立摆系统具体的有参数摄动及干扰,构造状态反馈控制u Kx=使不确定闭环系统是具有干扰衰减度γ的H∞鲁棒最优系统,且性能指标()()()T TJ x t Qx t u Ru t dt∞⎡⎤=+⎣⎦⎰具有最小的上界。
利用极点配置法和最优线性二次状态调节器LQR和线性二次输出调节器LQR控制倒立摆的方法。
使用极点配置法首先需要建立系统的线性模型,然后确定系统的闭环极点,再通过Ackerman公式算出对应的反馈增益矩阵Kf。
第1章:绪论1.1 倒立摆的发展历史及现状控制理论教学领域,开展各种理论教学、控制实验、验证新理论的正确性的理想实验平台就是倒立摆控制系统。
对倒立摆系统的研究能有效的反映控制中的许多典型问题,同时兼具多变性、强非线性和自然不稳定性等优点,通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题。
倒立摆系统作为一个实验装置,形象直观、结构简单、构件组成参数和形状易于改变、成本低廉,且控制效果可以通过其稳定性直观地体现,也可以通过摆杆角度、小车位移和稳定时间直接度量其实验效果,直观显著。
因而从诞生之日就受到国内外学者的广泛研究。
倒立摆系统的最初研究始于二十世纪50年代末,麻省理工学院的控制论专家根据火箭发射助推器的原理设计出一级倒立摆实验设备。
1966年Schaefer和Cannon应用Bang Bang控制理论将一个曲轴稳定于倒置位置,在60年代后期作为一个典型的不稳定严重非线性证例提出了倒立摆的概念,并用其检验控制方法对不稳定、非线性和快速性系统的控制能力受到世界各国许多科学家的重视。
而后人们又参照双足机器人控制问题研制出二级倒立摆控制设备,从而提高了检验控制理论或方法的能力,也拓宽了控制理论或方法的检验范围。
对倒立摆研究较多的是美国、日本等发达国家,如Kawamoto-Sh.等讨论了有关倒立摆的非线性控制的问题以及倒立摆的模糊控制的稳定性问题为其后的倒立摆模糊控制研究开辟了道路,美国国家航空和宇航局Torres-Pornales,Wilfredo等人研究了从倒立摆的建模、系统分析到非线性控制器设计的一系列问题,比较深入的研究了倒立摆的非线性控制问题并进行了实物仿真;科罗拉多州大学的Hauser. J正在从事基于哈密尔顿函数的倒立摆控制问题的研究;日本东京大学的Sugihara. Tomorniehi等研究了倒立摆的实时控制问题及其在机器人控制中的应用问题。
此外,还有如德国宇航中心的Schreiber等研究了倒立摆的零空间运动控制问题,分析了倒立摆的零空间运动特性与其稳定性之间的联系。
倒立摆的控制乔尼﹒林摘要:倒立摆沿水平轨道车移动的平衡问题是控制领域中的经典问题。
本文将介绍两种控制方法,令系在小车上的倒立摆从原来初始朝下的位置摆动到直立位置并保持平衡状态。
为了将倒立摆摆动到直立位置,一个启发式的非线性控制器和能量控制器首先运行。
等到倒立摆开始起摆,用一个线性的二次型调节器状态反馈最优控制器控制其保持平衡状态。
启发式控制器能在适当的时候输出一个重复信号,并且调节具体的实验装置。
能量控制器增加了一个进入摆动系统的适量的能量从而达到所需要的能量状态。
最优化状态反馈控制器是一个基于正常位置范围内的线性模型的一个稳定控制器,当车摆系统接近于平衡状态时有效控制其平衡。
摆杆从向下位置摆动到直立位置正是通过以上两种方法,其实验结果报告如下。
1.简介倒立摆系统的平衡问题是一个在控制系统方面的基本问题。
其能够有效地解释诸如线性不稳定系统的稳定控制概念。
由于系统本身是非线性系统,所以其常常用在阐述非线性控制的一些想法上。
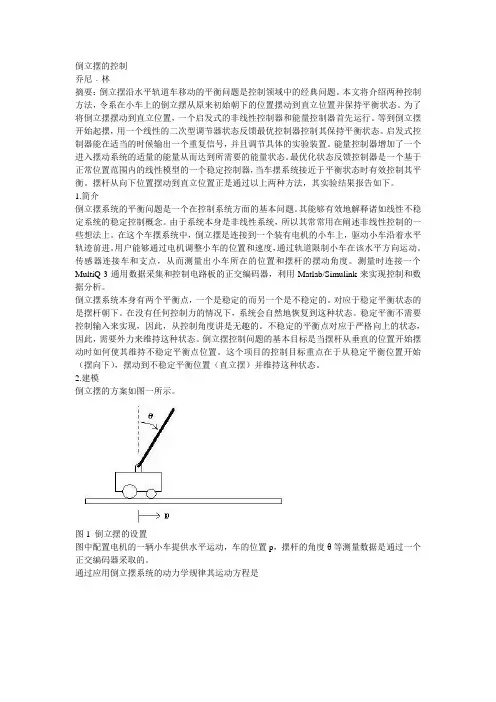
在这个车摆系统中,倒立摆是连接到一个装有电机的小车上,驱动小车沿着水平轨迹前进。
用户能够通过电机调整小车的位置和速度,通过轨道限制小车在该水平方向运动。
传感器连接车和支点,从而测量出小车所在的位置和摆杆的摆动角度。
测量时连接一个MultiQ-3通用数据采集和控制电路板的正交编码器,利用Matlab/Simulink来实现控制和数据分析。
倒立摆系统本身有两个平衡点,一个是稳定的而另一个是不稳定的。
对应于稳定平衡状态的是摆杆朝下。
在没有任何控制力的情况下,系统会自然地恢复到这种状态。
稳定平衡不需要控制输入来实现,因此,从控制角度讲是无趣的。
不稳定的平衡点对应于严格向上的状态,因此,需要外力来维持这种状态。
倒立摆控制问题的基本目标是当摆杆从垂直的位置开始摆动时如何使其维持不稳定平衡点位置。
这个项目的控制目标重点在于从稳定平衡位置开始(摆向下),摆动到不稳定平衡位置(直立摆)并维持这种状态。
倒立摆基础知识1.背景在控制理论发展的过程中,一种理论的正确性及在实际应用中的可行性,往往需要一个典型对象来验证,并比较各种控制理论之间的优劣,倒立摆系统就是这样的一个可以将理论应用于实际的理想实验平台。
倒立摆的典型性在于:作为实验装置,它本身具有成本低廉、结构简单、便于模拟、形象直观的特点;作为被控对象,它是一个高阶次、不稳定的(控制上的含义?)、非线性系统(MIMO间的非线性?)多变量、强耦合的复杂被控系统,可以有效地反映出控制中的许多问题;作为检测模型,该系统的特点与机器人、飞行器、起重机稳钩装置等的控制有很大的相似性。
因而对倒立摆的研究具有重要的工程背景和实际意义,通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。
其控制方法在军工、航天、机器人和一般工业过程领域中都有着广泛的用途,如机器人行走过程中的平衡控制、火箭发射中的垂直度控制和卫星飞行中的姿态控制等。
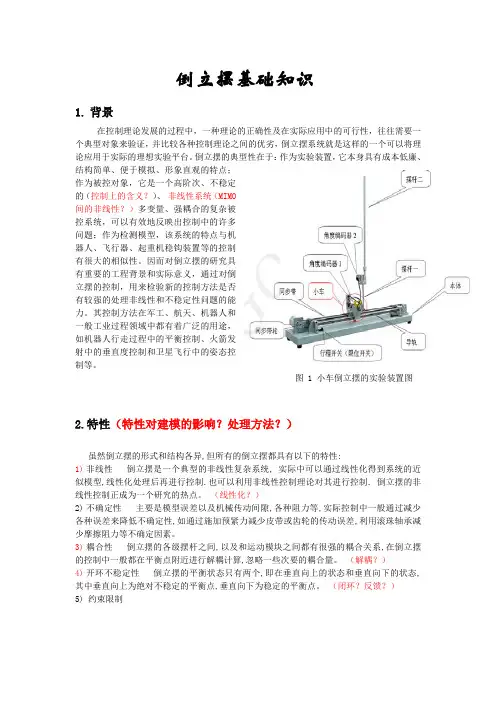
图 1小车倒立摆的实验装置图2.特性(特性对建模的影响?处理方法?)虽然倒立摆的形式和结构各异,但所有的倒立摆都具有以下的特性:1)非线性倒立摆是一个典型的非线性复杂系统, 实际中可以通过线性化得到系统的近似模型,线性化处理后再进行控制.也可以利用非线性控制理论对其进行控制. 倒立摆的非线性控制正成为一个研究的热点。
(线性化?)2)不确定性主要是模型误差以及机械传动间隙,各种阻力等,实际控制中一般通过减少各种误差来降低不确定性,如通过施加预紧力减少皮带或齿轮的传动误差,利用滚珠轴承减少摩擦阻力等不确定因素。
3)耦合性倒立摆的各级摆杆之间,以及和运动模块之间都有很强的耦合关系,在倒立摆的控制中一般都在平衡点附近进行解耦计算,忽略一些次要的耦合量。
(解耦?)4)开环不稳定性倒立摆的平衡状态只有两个,即在垂直向上的状态和垂直向下的状态,其中垂直向上为绝对不稳定的平衡点,垂直向下为稳定的平衡点。
(闭环?反馈?)5) 约束限制3. 分类依据不同的功能与作用,倒立摆的种类有很多:1)按摆杆数量的不同,可分为一级,二级,三级倒立摆等,多级摆的摆杆之间属于自由连接(即无电动机或其他驱动设备)一级倒立摆常用于控制理论的基础实验,多级倒立摆常用于控制算法的研究,倒立摆的级数越高,其控制难度更大,目前,可以实现的倒立摆控制最高为四级倒立摆。
闲聊倒立摆数学模型--2015思考与实践之(2)贾欣乐倒立摆是一个开环不稳定的系统,如果不加控制,重球离开其倒立平衡位置哪怕一点点,接着偏角θ就会出现崩溃式的增长,直到系统自动走向另一个平衡位置(稳定的“正立”位置)。
倒立摆的闭环控制相当困难,因而激发了诸多研究者的兴趣,该领域的文献可以说是汗牛充栋,不胜枚举。
倒立摆控制今日已被看作是检验控制器性能的一个标准化问题( a benchmark control problem)。
本文只讨论一级倒立摆的建模问题,不涉及控制器设计。
讨论也只是以不严密的闲聊的方式进行,与网友交流一下。
1. 一种常用的倒立摆建模方法从互联网下载了据称是哈尔滨工大的一份“课程设计说明书(论文):/p-700196752.html,其中一部分讨论了关于一级倒立摆数学模型建立机理,该例之特点是以摆杆取代了重球,其内容简述于下。
首先,建立受力“孤立体”:将小车和摆杆在铰链处切开,该处原为系统内力的水平分量F H及垂直分量F N均变成了外力(此处不考虑阻尼力矩),这两者分别以数值相等、方向相反的形式作用于小车与摆杆的孤立体上。
考虑小车孤立体的动力学关系,可得M ẍ= u - F H , (1) x是小车位移变量,M为其质量,u 为控制外力,由此知F H = u - M ẍ. (2)其次,考虑摆杆孤立体的力学“平衡”关系。
摆杆在水平方向上受力为F H = m d 2dt2(x + lsinθ) = m( ẍ+ lθcosθ - lθ2sinθ ), (3) 其中θ为摆杆的角偏移(相对于垂直线),l是摆杆的半长,m是摆杆质量。
由式(1)、(3)可得小车与摆杆整体水平向的运动模型(M+ m)ẍ+ mlθcosθ - mlθ2sinθ = u. (4)在垂直方向上摆杆受力的平衡关系为F N– mg = m d 2dt2(lcosθ) = - m( lθsinθ + θ2l cosθ ), (5) 故有F N = mg - m( lθsinθ + θ2cosθ ). (6)最后讨论摆杆的力矩平衡。
倒立摆系统自适应高阶微分反馈控制(齐国元,陈增强,袁著祉)(1.天津科技大学自动化系,天津300222;2.南开大学自动化系,天津300071)摘要:利用提取的系统高阶微分信息,提出了自适应高阶微分反馈控制器.某种程度上该控制器不依赖于单输入单输出(SISO)非线性仿射系统的模型.并且分析了闭环系统的稳定性和鲁棒性.通过将摆角方程的位移加速度看作是控制输入,将倒立摆系统转化成相互影响的两个SISO仿射系统,从而用两个串级高阶微分反馈控制器成功地实现了倒立摆系统的镇定与调节.数字仿真表明,控制器对摆的基准模型实现了较为满意的控制,而且该控制方法对非线性摩擦项,对摆长、摆质量、小车质量等参数变化以及外扰动具有强鲁棒性.关键词:倒立摆系统;高阶微分器;自适应高阶微分反馈控制器;不依赖模型控制器;鲁棒性1.引言作为一个典型的不稳定非线性装置,倒立摆系统的镇定和调节的问题在不同的控制设计技术中的演示和推动成为了一个基准的例子。
例如,基于郑和约翰提出摆动能量的非线性控制器的模型是使用L 小增益逼近和林提供了线性状态反馈控制器是摆平衡。
咔哇他你线性化了并列的两个倒立摆系统的非线性数字模型,然后通过使用状态反馈增益载体和全状态观测器设计了一个稳定性控制器。
姚首先通过模糊法来识别动态线性化模型,然后根据这个模型设计出极点分配控制器使系统稳定。
这些文献中涉及到的控制器取决于非线性基准模型或倒立摆的线性化模型。
一些设计的方法考虑到了鲁棒控制器的摩擦项。
但是不确定性低于基准模型。
实际上,基于标准控制器取决于控制装置的模型是现代控制理论的重要特征。
我们发现可测量的信息和它们的n阶微分方程在放射系统中具有重要的意义。
微分不仅是可变输出速率,而且也是系统的内部状态,翰利用高阶微分提出了自抗扰控制器。
但是对控制器的闭环系统设有一个稳定性和收敛性的解决方法。
在文献6中,我们设计了高阶微分器独立于控制装置,取决于信号本身。
高阶微分器可以接近实际信号和提取n阶微分。
倒立摆控制Johnny Lam 摘要: 倒立摆沿着水平轨道车移动时的平衡问题是控制领域中的经典问题。
本文将介绍两种方法,使系在小车上的倒立摆从初始向下位置摆到直立位置,并保持该状态。
通过非线性启发式控制器和能量控制器,可以使倒立摆摆向直立位置。
倒立摆摆动起来后,通过线性二次型调节器的状态反馈最优控制器维持其平衡状态。
在合适的时间,启发式控制器输出一个重复信号,然后通过微调使摆锤到达最合适的位置。
通过能量控制器增加合适的能量到倒立摆系统,来达到所期望的能量状态。
最优状态反馈控制器是基于各地的直立位置线性模型一个稳定的控制器,它在车摆系统接近平衡状态时能产生效果。
这两种方法都在倒立摆摆在向下位置时记录实验结果。
1.简介倒立摆系统是在控制系统领域中的一个标准问题。
在证明线性控制的思想上它经常常是很有效的,例如使不稳定的系统的稳定化等。
由于该系统本质上是非线性的,它也一直在说明一些结论在非线性控制方面也是有效的。
在这个系统中,倒立摆附着到配备有马达驱动的沿水平轨道行驶的小车上。
用户能够通过电机来控制小车的位置和速度还能通过轨道来控制小车在水平方向上运动。
传感器被连接到小车和小车的中心上来测量小车的位置和钟摆关节的角度。
测量采用连接到MultiQ - 3通用数据采集和控制电路板上的正交编码器。
Matlab / Simulink用于实现控制和分析数据。
倒立摆系统本身有两个平衡点,其中之一是稳定的,而另一个是不稳定的。
稳定平衡对应于一个状态,其中摆锤向下。
在没有任何外力的情况下,该系统会自然返回到这个状态。
稳定平衡不需控制输入来实现,因此,从控制的角度来看是没有意义的。
不稳定的平衡对应于另一个状态,其中摆点完全向上,因此,需要控制输入力的大小,来保持在这个位置。
倒立摆系统的基本控制目标是使倒立摆在不稳定平衡位置上平衡。
该项目的控制目标将侧重于从稳定的平衡位置(摆朝下)起,摆动到它的不稳定的平衡位置(直立摆),并保持在这种状态。
基于分段遗传算法的倒立摆摆起控制研究新技术的发展,改变了人们对控制问题的思考方式。
机器人技术的发展使人们能够利用机器人来解决许多控制问题,并使系统的控制更加完善。
随着计算机技术的发展,倒立摆控制也开始受到人们的重视。
倒立摆是一种机械系统,它可以像摆钟一样持续稳定的振动。
从控制的角度来看,由于倒立摆很容易破坏稳定,因此在控制倒立摆时,控制器的研制非常重要,对于倒立摆控制研究也变得十分重要。
本文主要介绍基于分段遗传算法的倒立摆控制研究,通过引入分段遗传算法来改进和提高倒立摆的控制效果。
首先,介绍倒立摆系统的建模,并将系统建模为表示系统参数的状态空间方程。
其次,介绍分段遗传算法,该算法可以有效地解决复杂问题,并通过算法模拟来寻找系统最优化参数。
最后,介绍基于分段遗传算法的倒立摆控制方法,针对倒立摆系统建模,应用分段遗传算法,结合系统模型进行倒立摆控制,以达到摆动参数的最佳化。
首先,本文介绍倒立摆系统的建模。
由于倒立摆系统是一个无摩擦的物理系统,它可以用一个状态空间方程表示,即:$$begin{bmatrix} dot{theta} ddot{theta} end{bmatrix} = begin{bmatrix} 0 & 1 -frac{g}{l} & -frac{b}{ml^2}end{bmatrix} begin{bmatrix} theta dot{theta} end{bmatrix} + begin{bmatrix} 0 frac{1}{ml^2} end{bmatrix} U$$ 其中,θ表示倒立摆的摆角,U表示控制量,m、l、g、b分别表示质量、杆长、重力加速度和非线性阻尼系数。
倒立摆系统的建模工作已完成,接下来介绍控制算法:分段遗传算法。
分段遗传算法是一种基于遗传算法的控制策略,它结合了时间分段和遗传算法的优点。
它具有收敛速度快,精度高的优点,且不需要预先知道系统的响应模型,有效地解决复杂系统的控制问题。
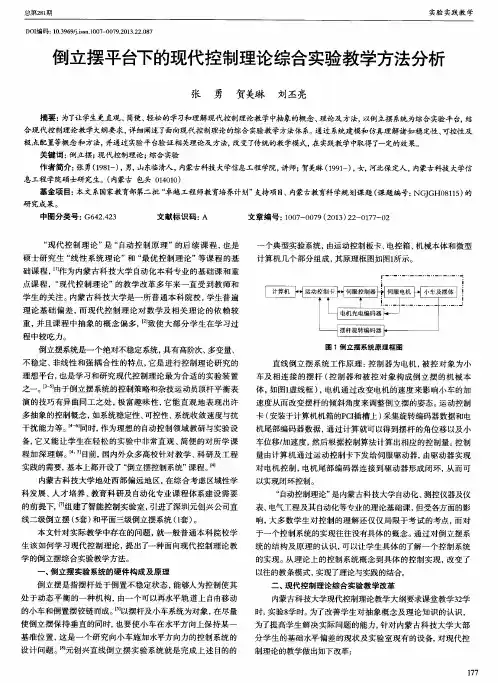
目录1 绪论 (2)1.1概述 (3)1.2倒立摆简介 (3)1.3系统的设计任务及要求 (3)2 单级倒立摆的控制方案 (4)2.1 经典控制理论的方法及其特点 (4)3 软件介绍 (6)3.1 MATLAB软件简介 (6)3.2 MATLAB的指令介绍 (9)3.3 SIMULINK简介 (10)3.4 SIMULINK各模块介绍 (11)3.5 创建SIMULINK模型 (12)4 倒立摆系统的建模 (14)4.1 模型特征 (14)4.2 线性化方法 (16)4.3系统的可控性、可观测性分析 (19)5 控制器的设计及仿真 (24)5.1 控制目标 (24)5.2 PD控制器及其性能分析 (24)5.3 PID控制器及其性能分析 (28)5.4 LQR控制器及其性能分析 (35)5.5 3种控制器的比较 (36)6 小结 (38)7 致谢 (40)8 参考文献 (41)第1章绪论第1.1节概述在控制理论发展的过程中,某一理论的正确性及实际应用中的可行性需要一个按其理论设计的控制器去控制一个典型对象来验证,倒立摆就是这样一个被控制对象倒立摆系统是一个多变量快速,非线性和自然不稳定系统,在控制过程中能有效地反映控制中的许多关键问题,如非线性问题,系统的鲁棒性问题,随动问题,镇定问题及跟踪问题等。
倒立摆系统作为一个实验装置,形象直观,结构简单,构件组成参数和形状易于改变,成本低廉。
倒立摆系统的控制效果可以通过其稳定性直观地体现,也可以通过摆杆角度,小车位移和稳定时间直接度量,其实验效果直观,显著。
当新的控制理论与方法出现后可以用倒立摆对其正确性和实用性加以物理验证,并对各种方法进行快捷,有效,生动的比较。
早在60 年代人们就开始了对倒立摆系统的研究1966 年Schaefer 和Cannon 应用Bang Bang控制理论,将一个曲轴稳定于倒置位置。
在60 年代后期,作为一个典型的不稳定,严重非线性证例提出了倒立摆的概念,并用其检验控制方法对不稳定,非线性和快速性系统的控制能力,受到世界各国许多科学家的重视。
基于Matlab和Automation Studio的倒立摆控制仿真罗文韬
【期刊名称】《农业开发与装备》
【年(卷),期】2017(000)007
【摘要】针对一级倒立摆的控制问题使用状态反馈极点配置、PID方法控制、线性二次型最优调节器三种方法,使用Matlab和Automation Studio(AS)软件进行了建模和仿真,实现了一阶倒立摆的稳定控制.在建立完善的模型中,使用阶跃信号、正弦信号、脉冲信号、噪声信号等进行了测试,测试结果表明,倒立摆系统可实现稳定控制.
【总页数】5页(P63-67)
【作者】罗文韬
【作者单位】南京邮电大学通信与信息学院信息工程,江苏南京 210023
【正文语种】中文
【相关文献】
1.基于ADAMS和MATLAB的双轮虚拟倒立摆的控制仿真 [J], 曹志杰;孙汉旭;贾庆轩
2.Matlab/SIMULINK开发工具的建模与实现——贝加莱Automation Studio 对MATLAB/SIMULINK开发工具的支持 [J], 无
3.基于MATLAB的二级倒立摆的稳摆控制研究 [J], 马杰;张景钰
4.基于MATLAB的二级倒立摆的稳摆控制研究 [J], 马杰;张景钰
5.基于MATLAB的旋转倒立摆建模和控制仿真 [J], 谢友强;戴福全;高学山
因版权原因,仅展示原文概要,查看原文内容请购买。
倒立摆实验的实施方案倒立摆实验是一种经典的控制工程实验,通过对倒立摆系统的建模、控制器设计和实际操控,可以帮助学生深入理解控制系统的原理和方法。
本文将从实验器材准备、实验步骤、数据采集和分析等方面,详细介绍倒立摆实验的实施方案。
1. 实验器材准备。
首先,需要准备倒立摆实验装置,包括倒立摆模型、传感器、执行器、数据采集卡等。
倒立摆模型通常由直流电机和杆组成,传感器可以选择安装在杆上,用于检测杆的角度;执行器可以通过控制直流电机的转速来实现对倒立摆的控制;数据采集卡用于采集传感器的信号,并将数据传输到计算机上进行分析。
2. 实验步骤。
接下来,我们将详细介绍倒立摆实验的具体步骤。
首先,将倒立摆模型安装在实验台上,并连接传感器、执行器和数据采集卡。
然后,打开数据采集软件,对传感器进行校准,并设置数据采集参数。
接着,设计倒立摆的控制器,可以选择经典的PID控制器或者现代控制理论中的其他控制器。
在控制器设计完成后,将控制器与执行器进行连接,并进行调试。
最后,进行实验操作,通过改变控制器的参数或者外部干扰,观察倒立摆系统的响应,并记录实验数据。
3. 数据采集和分析。
在实验过程中,需要及时采集倒立摆系统的数据,包括杆的角度、直流电机的转速、控制器的输出信号等。
采集到的数据可以通过数据采集软件进行实时显示和保存。
在实验结束后,需要对数据进行分析,可以利用MATLAB等工具进行数据处理和曲线拟合,得到倒立摆系统的动态特性参数,如阻尼比、自然频率等,从而评估控制器的性能。
通过以上实施方案,学生可以全面了解倒立摆实验的具体步骤和操作流程,掌握控制系统的设计与实现方法,提高实际操作能力和工程应用能力。
同时,也可以培养学生的团队合作意识和实验数据处理能力,为他们今后的科研和工程实践打下坚实的基础。
倒立摆的一种新的控制方法
柴军营;何广平
【期刊名称】《北方工业大学学报》
【年(卷),期】2007(019)003
【摘要】本文针对水平轨道直线型倒立摆的稳定控制问题,运用基于非线性系统扩展的谐波控制方法,实现了小车的水平位置和摆杆垂直位置的控制.与已有方法比较,此种方法不必对非线性系统进行线性化,系统模型更具真实性.仿真实验表明,本方法能较好地达到控制效果.此种方法也可运用到水平欠驱动机械臂等一类二阶非完整系统的控制中.
【总页数】5页(P26-30)
【作者】柴军营;何广平
【作者单位】北方工业大学机电工程学院,100041,北京;北方工业大学机电工程学院,100041,北京
【正文语种】中文
【中图分类】TP271
【相关文献】
1.一类新的二阶滑模控制方法及其在倒立摆控制中的应用 [J], 李雪冰;马莉;丁世宏
2.X-Z倒立摆的一种饱和非线性稳定控制方法的研究 [J], 王家军;刘栋良;王宝军
3.一种基于ANFIS的模糊RBF网络的倒立摆控制方法 [J], 李恒嵬
4.浅谈基于模糊控制关于非一种线性控制方法对倒立摆控制系统响应特性的研究
[J], 于淼宇
5.一种基于非线性滤波的倒立摆控制方法研究 [J], 孙亮;王水清
因版权原因,仅展示原文概要,查看原文内容请购买。
2016年8月 控 制 工 程 Aug. 2016 第23卷第S0期Control Engineering of ChinaV ol.23, No.S0文章编号:1671-7848(2016)S0-0006-07DOI: 10.14107/ki.kzgc.160126倒立摆分段控制方法贾欣乐,张显库(大连海事大学 航海动态仿真和控制实验室,辽宁 大连 116026)摘 要:为了解决非线性控制器设计参数求取困难的瓶颈问题,使用极点配置方法设计出线性控制器,以此为基础设计反馈线性化非线性控制器的参数,形成了系统化的设计方法,成功解决了原非线性控制器参数靠试凑的难题。
所给出的方法在倒立摆的分段控制中取得了良好的仿真结果,说明所设计的方法便捷可行。
关键词:倒立摆;非线性控制;极点配置;反馈线性化 中图分类号:TP13 文献标识码:ASegment Control Strategy for Inverted PendulumJIA Xin-le, ZHANG Xian-ku(Laboratory of Marine Simulation and Control, Dalian Maritime University, Dalian 116026, China )Abstract: This paper is devoted to tackle the difficult task of determining the design parameters in a nonlinearcontroller. The problem is solved in an systematic way as follows: A linear counterpart (linear segment) of the original nonlinear control system (nonlinear segment) is formed by linearization; the pole placement method is applied to find the feedback matrix for the linear controller; this matrix is simultaneously used to formulate a nonlinear algebraic equation, which is used to find the required feedback linearization nonlinear controller. An inverted pendulum is taken as an example, and simulations show the satisfactory stability and dynamic performance.Key words: Inverted pendulum; nonlinear control; pole placement; feedback linearization1 引 言倒立摆的研究对机器人行走、火箭发射以及航天器的姿态控制等工程应用,均有重要意义。
倒立摆研究理论上之困难在于过程的开环不稳定性、数学模型的非线性和系统结构的欠驱动性。
欠驱动性反映在其只有一个控制量-小车驱动电机的电枢电压u ,却要同时控制2个独立的状态变量-摆杆偏角 以及小车的位移x ,而全面地描述该系统则需要4个状态变量,故而控制难度很大。
非线性使倒立摆控制器的设计缺乏统一的理论支持,各种“时髦的”倒立摆非线性控制策略,包括自适应控制、人工智能(模糊逻辑、神经网络、遗传算法)、鲁棒控制、逐步后推算法(Backstepping)、CLF(Control Lyapunov Function)、反馈线性化等相继涌现,丰富了该领域研究成果的宝库[1-3]。
然而在众多相关文献中,对其仿真结果的性能指标、详尽性、可复现性等方面加以综合检验,令人足够满意者并不多见。
究其原因,笔者以为这与人们对“纯非线性控制”的过高期望不无关系;其实线性控制过程中包含大量有用信息,却未被上述设计者充分利用,或者被完全忽略了。
本文提出的分段控制算法出发点是将线性控制与非线性控制两种手段有机地结合起来,充分利用线性系统的研究结果以协助非线性控制器的设计,从而有效地提高倒立摆系统非线性控制的稳定性和动静态质量。
近年来,采用非线性理论结合线性技术于单级倒立摆的控制之研究,已取得一些结果,但只限于个例[5-10],尚缺少系统性的分析与总结。
本文在完善后者方面做了进一步的工作,其特点在于:① 分段式控制方法:数学模型区分为线性段与非线性段;控制器算法从线性段的极点配置到非线性段的CLF(control Lyapunov function)、反馈线性化分别讨论;② 线性与非线性方法之间的交叉、融第S0期 贾欣乐等:倒立摆分段控制方法 ·7·合的深化探讨;③ 手册式的写作风格:参考者只要 输入倒立摆的基本物理参数与控制器设计指标(如所要求的闭环极点位置),即可应用这里给出的公式求解控制器。
文章给出了几种典型模型(M)⊕控制(C)结合方案的仿真研究结果,以证明所提出的设计方法的可行性和便捷性。
本文只涉及倒立摆的镇定问题,至于倒立摆的“起摆”问题,留待另文讨论。
2 倒立摆的分段数学模型简化的小车倒立摆系统,如图1所示。
图1 小车倒立摆系统图Fig. 1 Diagram of the inverted pendulum其中,M 为小车质量;m 为摆杆质量;l 为摆杆半长。
我们采用自上而下的模型化分段策略,即模型的复杂程度递减。
2.1 计及驱动电机动态及摩擦阻力的非线性数学模型(1n M -a 模型)由参考文献[11]可知:()()2cos g sin c I ml ml x m l c ϕϕϕϕϕ++=- (1) ()()2cos sin xd u ml M m x ml k x k u ϕϕϕϕ++=-+ (2) 式中,23c I ml =为摆杆对质心c 的转动惯量;g 为重力加速度;u 为施加于驱动电机电枢上的电压,以使小车向右行为正;c ϕ为转动摩擦系数;xd k 为电机角速度系数;u k 为驱动电机的放大系数,且222t gxd a k k k R r = (3)0.06c ϕ= (4)t g u a k k k R r=(5)式中,t k 为电机力矩系数;k g 为齿轮比;a R 为电枢电阻;r 为驱动轮半径。
取小车位移、摆杆偏离角度、小车速度、摆杆角速度为状态变量:[][]TT1234,,,,,,X X X X X x xϕϕ== (6) 将式(1)、(2)转换成仿射型状态空间方程:X f gu =+ (7) 式中,[]T1234,,,f f f f f =,[]T1234,,,g g g g g =,并且:13243224242342422423[(cos )(sin )(sin )]/[()(sin )(cos )(sin )]/a xd xd f X f X f ml X mgl X c X I mlX X k X d f M m mgl X c X ml X mlX X k X dϕϕ===--+-=+-+- (8)1234200cos a u u g g g I k g ml X k d====- (9)()2222cos a d I M m m l X =+- (10)式中,2243a c I I ml ml =+=为摆杆对铰接点a 的转动惯量。
式(7)给出非线性计及电机动态和摩擦阻力最全面的倒立摆数学模型,是分段模型原始出发点。
2.2 不考虑驱动电机动态及摩擦阻力的非线性模型(1n M -b 模型)在式(8)-(10)中,令xd k =0,c ϕ=0,u k =1;但保留非线性项,即可得到1n M b -分段模型。
此时控制u 代表的是作用于小车的拖动力(F ),以使小车右行为正。
文献中谈到倒立摆的非线性控制,涉及的通常就是这类模型[5-6]。
2.3 考虑驱动电机动态及摩擦阻力的线性模型(1M -a 模型)对式(8)-(10)线性化,取sin ϕϕ≈,cos 1ϕ≈,有:132433223333444422433444f X f X f a X a X a X f a X a X a X ===++=++ (11)12334400g g g b g b ==== (12) 式中,ij a ,i =1,2,3,4, j =1,2,3,4为线性模型系统矩阵A 的元素,有:()()()()223223334424344g c xd xd a m l g dl a I ml k dl a mlc dl a M m m l dl a mlk dl a M m c dlϕϕ=-=-+==+==-+ (13)且j b , j =1,2,3,4是线性模型输入矩阵B 的元素,有:()234c u u b I ml k b mlk dl=+=- (14)()()222c dl I ml M m m l =++- (15)•8• 控 制 工 程 第23卷系统矩阵A 的各元素除上面已赋值者外,其余为11a =0,12a =0, 13a =1,14a =0,21a =0,22a =0,23a =0, 24a =1, 31a =0,41a =0;输入矩阵B 的各元素除上面已赋值者外,1b =0,2b =0。
将以上各式写成标准的线性型式有:X AX +Bu = (16) 2.4 不考虑驱动电机动态及摩擦阻力的线性模型(1M -b 模型)这属于最简化的倒立摆模型,通常为研究者所乐于采用[5]。
在式(11)-(15)中,取xd k =0,c ϕ=0, u c =1即得。
此时,控制u 为作用于小车的拖动力(F ),以使小车右行为正。
3 倒立摆的分段控制器设计这里,我们采用自下而上的分段设计策略,即最先研究对线性模型实施线性控制的控制器,然后逐级上推至对非线性模型进行非线性控制的控制器。
具体设计中自然离不开过程模型。
3.1 基于极点配置的倒立摆线性控制器(1C -a 控器)-考虑摩擦、驱动电机动态以式(16)为出发点的线性反馈控制器为u =-KX (17)[]T1234,,,K k k k k = (18)此时闭环系统成为()c X =A-BK X =A X (19) 式中,闭环极点是如下特征方程的根,c A 为闭环系统矩阵:0c sI A sI A-BK -=-= (20)即:43232100s a s a s a s a ++++= (21)式中,各系数分别为()()()()()()()3334433442334443344231424343443343433414342324343434413434332432342304323421a a ab k b k a a a a a a b k b k b a b a k b a b a k a a a a a b a b a k b a b a k b a b a k a b a b a k =-+++=--+++-+-=-+-+-+-=- (22)设置闭环极点,特征方程各系数分别是:()()()()()()3123421234123413412123401234a a a λλλλλλλλλλλλλλλλλλλλλλλλ=-+++=++++=-+++= (23)为在左半平面上的10λ<, 20λ<, 30λ<, 40λ<,从而保证闭环系统稳定性。