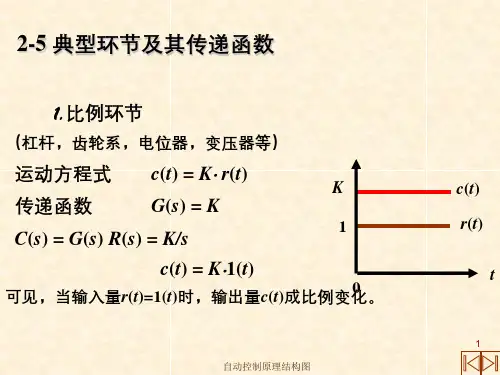
5--典型环节传递函数-延时环节
- 格式:ppt
- 大小:98.00 KB
- 文档页数:5
1、反馈:输出信号被测量环节引回到输入端参与控制的作用。
2、开环控制系统与闭环控制系统的根本区别:有无反馈。
3、线性及非线性系统的定义及根本区别:当系统的数学模型能用线性微分方程描述时,该系统的称为线性系统。
非线性系统:一个系统,如果其输出不与其输入成正比,则它是非线性的。
根本区别:线性系统遵从叠加原理,而非线性系统不然。
4、传递函数的定义及特点:零初始条件下,系统输出量的拉斯变换与输入量的拉斯变换的比值。
用G〔s〕表示。
特点:1〕、传递函数是否有量纲取决于输入与输出的性质,同性质无量纲。
2〕、传递函数分母中S的阶数必n不小于分子中的S的阶数m,既n=>m ,因为系统具有惯性。
3〕、假设输入已给定,则系统的输出完全取决于其传递函数。
4〕、物理量性质不同的系统,环节和元件可以具有相同类型的传递函数。
5〕、传递函数的分母与分子分别反映系统本身与外界无关的固有特性和系统同外界的关系。
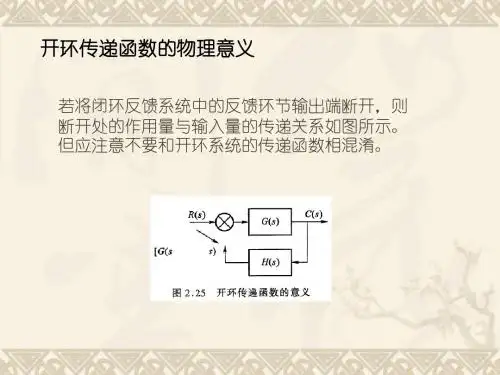
5、开环函数的定义:前向通道传递函数G〔s〕与反馈回路传递函数H(s)之积。
6、时间响应的定义和组成:系统在激励信号作用下,输出随时间的变化关系。
按振动来源分为:零状态响应和零输入响应。
按振动性质:自由响应和强迫响应。
7、瞬态性能指标以及反映系统什么特性:性能指标:上升时间tr、峰值时间tp、最大超调量Mp、调整时间ts、振荡次数N。
这些性能指标主要反映系统对输入的响应的快速性。
8、稳态误差的定义及计算公式:系统进入稳态后的误差。
稳态误差反映稳态响应偏离系统希望值的程度。
衡量控制精度的程度。
稳态误差不仅取决于系统自身结构参数,而且与输入信号有关。
系统误差:输入信号与反馈信号之差。
9、减少输入引起稳态误差的措施:增大干扰作用点之前的回路的放大倍数K1,以及增加这一段回路中积分环节的数目。
10、频率响应的概念:线性定常系统对谐波输入的稳态响应称为频率响应。
11、频率特性的组成:幅频特性和相频特性。
12、稳定性的概念:系统在扰动作用下,输出偏离原平衡状态,待扰动消除后,系统能回到原平衡状态〔无静差系统〕或到达新的平衡状态〔有静差系统〕。
机械工程控制基础复习 第一章 绪论1.控制理论在工程技术领域中体现为工程控制论,在机械工程领域则体现为机械工程控制论。
2.工程控制论实质上是研究工程技术中广义系统的动力学问题。
具体地说,它研究的是工程技术中的广义系统在一定的外界条件(即输入或激励,包括外加控制与外加干扰)作用下,从系统的一定的初始状态出发,所经历的由其内部的固有特性(即由系统的结构与参数所决定的特性)所决定的整个动态历程;研究这一系统及其输入、输出三者之间的动态关系。
3.y(t)称为系统的输出,显然,y(t)(它就是微分方程的解)是由系统的初始状态、系统的固有特性、系统与输入之间的关系以及输入所决定的。
4.工程控制论(包括机械工程控制论)的内容大致可归纳为如下五个方面: ⑴当系统已定、输入(或激励)已知时,求出系统的输出(或响应),并通过输出来研究系统本身的有关问题,此即系统分析问题;⑵当系统已定,确定输入,且所确定的输入应使得输出尽可能符合给定的最佳要求,此即最优控制问题;⑶当输入已知时,确定系统,且所确定的系统应使得输出尽可能符合给定的最佳要求,此即最优设计问题;⑷当输出已知时,确定系统,以识别输入或输入中的有关信息,此即滤波与预测问题; ⑸当输入与输出均已知时,求出系统的结构与参数,即建立系统的数学模型,此即系统识别或系统辨识问题。
5.反馈:系统的输出不断地、直接或间接地、全部或部分地返回,并作用于系统。
负反馈:输出(被控量)偏离设定值(目标值)时,反馈作用使输出偏离程度减小,并力图达到设定值。
反馈的作用:消除偏离正反馈: 输出偏离初始值(或稳定值)时,反馈作用使输出偏离程度加剧。
反馈的作用:加剧偏离。
6.开环控制:只有输入量对输出量产生控制作用,输出量不参与对系统的控制。
特点是 结构简单、维护容易、成本低、不存在稳定性问题;输入控制输出;输出不参与控制; 系统没有抗干扰能力。
适用范围:输入量已知、控制精度要求不高、扰动作用不大。
(1)首先正确求得传递函数分子分母参数。
>> G=tf(400,[1,50 0])Transfer function:400----------s^2 + 50 s>> [num,den]=tfdata(G,'v') %以向量的形式给出分子分母num =0 0 400den =1 50 0这个问题后面的表达式是怎么得来的,我不太清楚。
可能是算法中要求的。
你可再认真看一下原算法描述。
(2)有延迟参数的传递函数可通过设置tf的属性值来表示。
>> G=tf(400,[1,500],'ioDelay',8) %设置系统属性ioDelay的值Transfer function:400exp(-8*s) * ----------s^2 + 50 s延迟参数也可通过以下方式设置:>> G.iodelay=8Transfer function:400exp(-8*s) * ----------s^2 + 50 s具体对于一个系统G有哪些属性值,可以通过以下函数获得。
>> get(G) %获取系统的所有属性num: {[0 0 400]}den: {[1 50 0]}Variable: 's'Ts: 0ioDelay: 8InputDelay: 0OutputDelay: 0InputName: {''}OutputName: {''}InputGroup: {0x2 cell}OutputGroup: {0x2 cell}Notes: {}UserData: []不知以上回答是否满意?欢迎就书稿中的问题继续提问,也欢迎给出批评指导意见![本帖最后由赵广元于 2009-10-2900:46 编辑]如果该会员帮助了您,请给TA一个红心哦!红心可帮助TA换取书籍、礼品哦!引用报告评分回复TOPMatlab中文函数大全上线,欢迎大家完善!点击这里查询相关函数chg555M学校:秀才帖子80 5#大中小发表于 2009-10-2913:54 只看该作者非常感谢赵老师的及时解答!!上述例子是刘金琨老师书上的。