SURF算法在图像检索中的应用
- 格式:pptx
- 大小:2.20 MB
- 文档页数:40

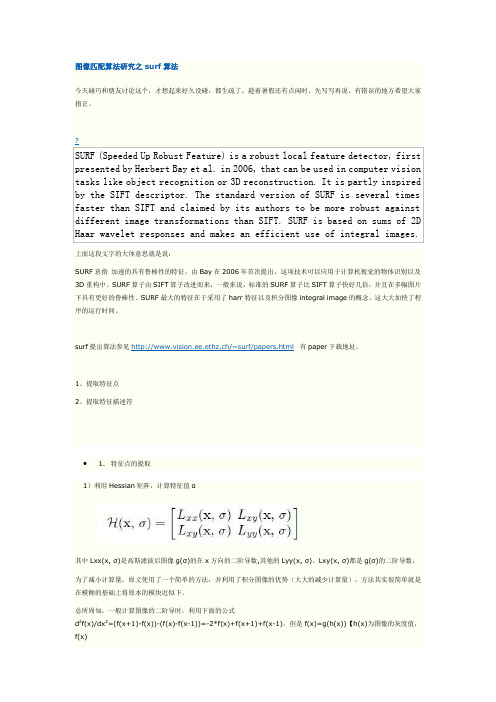
上面这段文字的大体意思就是说:SURF意指加速的具有鲁棒性的特征,由Bay在2006年首次提出,这项技术可以应用于计算机视觉的物体识别以及3D重构中。
SURF算子由SIFT算子改进而来,一般来说,标准的SURF算子比SIFT算子快好几倍,并且在多幅图片下具有更好的鲁棒性。
SURF最大的特征在于采用了harr特征以及积分图像integral image的概念,这大大加快了程序的运行时间。
surf提出算法参见http://www.vision.ee.ethz.ch/~surf/papers.html有paper下载地址。
1、提取特征点2、提取特征描述符1. 特征点的提取1)利用Hessian矩阵,计算特征值α其中Lxx(x, σ)是高斯滤波后图像g(σ)的在x方向的二阶导数,其他的Lyy(x, σ)、Lxy(x, σ)都是g(σ)的二阶导数。
为了减小计算量,原文使用了一个简单的方法,并利用了积分图像的优势(大大的减少计算量),方法其实很简单就是在模糊的基础上将原本的模块近似下。
总所周知,一般计算图像的二阶导时,利用下面的公式d2f(x)/dx2=(f(x+1)-f(x))-(f(x)-f(x-1))=-2*f(x)+f(x+1)+f(x-1)。
但是f(x)=g(h(x))【h(x)为图像的灰度值,f(x)是将h(x)高斯滤波处理的灰度函数】图一模板近似以9X9滤波器为例,如上图所示,左边两幅图分别为灰度图像在中心点(黑色点)处的二阶导数d2f(x)/dx2和d2f(x)/dxdy的模板对应的值, 近似后变成右边的两幅图,图中灰色部分像素值为0。
可是这样计算特征值不是也很复杂么?当然,所以作者提供了一种新思路--使用积分图像。
积分图像,顾名思义,即指当前像素点所在位置距原点(0,0)所包围面的所有灰度之和。
绿色的部分为当前像素点,红色为积分区域。
这样计算图像中任意一块矩形区域的灰度之和Sx只需要利用矩形4个顶点(Xi,Yi)(i=1,2,3,4 顺序为从上之下,先左后右)的积分值S(x,y)即可。

surf特征提取Surf(SpeededUpRobustFeatures)特征提取技术是一种广泛应用的机器视觉技术,旨在检测与识别图像中的特征点。
Surf特征提取技术是一种极为有效的特征提取方法,可以从图像中提取大量重要信息。
Surf特征提取技术基于Rotation Invariance Feature Transform(RIFT)技术,它被认为是一种强大的方法,可以克服传统技术(如SIFT)中存在的局限性,如旋转不变性。
Surf特征提取技术可以被认为是一种模型保持技术,它采用两个基础技术:尺度不变性技术(SIFT)和旋转不变性技术。
SIFT和RIFT的基本原理是使用流行的尺度空间理论(Multi-Scale Space Theory)来找到图像中的特征。
在检测到特征之后,它们将用作特征描述符。
简而言之,特征描述符是由一系列特征来描述一幅图像中的某一特定区域。
Surf特征提取技术可以非常有效地检测出图像中的特征点,这些特征点可以用来分析图像中的模式。
它的强大之处在于可以分析出图像中模式的特征,同时忽略其他非结构化的信息。
Surf特征提取技术的一个重要优势是可以同时处理多张图像,从而加快处理速度。
而另一个重要的优势是可以忽略图像中的噪点,这可以有效地检测出图像中的重要特征。
Surf特征提取技术主要应用于计算机视觉领域,如图像匹配和图像识别。
首先,它可以用来检测图像中的特征点,这些特征点可以用来定位图像中的目标内容,例如脸部和轮廓等。
其次,它可以用来检测图像中的不同类型的边缘和聚类,这有助于图像识别系统对图像内容进行识别。
Surf特征提取技术的一个重要的缺点是不能很好地处理运动物体。
当处理运动物体时,Surf特征提取技术不能很好地检测出运动部分的变化,这会导致其结果的偏差。
此外,该技术的可扩展性和可伸缩性也被认为是一个比较大的问题,其计算复杂度也较高,这对于处理大型图像集来说可能是一个问题。
Surf特征提取技术是一种广泛应用的技术,它为计算机视觉领域提供了许多重要的功能。

改进SURF算法在图像汉字识别中的应用孟伟;钟娜【摘要】针对复杂背景下汉字匹配准确率较低的问题,提出一种改进的SURF算法。
该算法利用灰度分级的字符分割方法,先进行灰度分割增强图像的对比度,采用灰度分级树将图像中的所有像素处理为树的模式进行计算,根据灰度分级确定主节点,根据主节点的级别所对应的灰度值对图像进行分割。
同时,根据汉字结构的特殊性,取消了SURF算法的旋转不变性。
实验结果表明,与未使用改进的SURF 算法相比,对图像质量较差的文本图像,改进的SURF算法能有效地提高其匹配的准确率。
%Aiming at the low matching accuracy of Chinese characters, an improved algorithm of SURF is presented. The algorithm is based on gradation character segmentation. Contrast of image is enhanced by using gray level segmentation, and then with the gray level classification tree, all pixels in the image are processed to the tree model. According to the gray level classification, the main node is determined. Grey level corresponding to the main node level is used in image segmentation. According to the particularity of Chinese characters, the rotation invariance of SURF algorithm is cancelled. Experimental results show that the improved algorithm can improve the matching accuracy effectively, especially for text image of poor quality.【期刊名称】《计算机工程与应用》【年(卷),期】2015(000)012【总页数】5页(P156-160)【关键词】复杂背景;汉字匹配;快速鲁棒特征(SURF)算法;灰度分级;字符分割【作者】孟伟;钟娜【作者单位】北京林业大学信息学院,北京 100083;北京首钢自动化信息技术有限公司,北京 100043【正文语种】中文【中图分类】TP3911 引言近年来,汉字识别一直是模式识别等相关领域内长期的研究热点[1]。

图像特征点提取及匹配算法研究论文1.SIFT算法:SIFT(Scale-Invariant Feature Transform)算法是一种经典的图像特征点提取算法。
该算法首先使用高斯滤波器对图像进行多尺度的平滑处理,然后使用差分算子来检测图像中的关键点,最后计算关键点的主方向和描述符。
SIFT算法具有尺度不变性和旋转不变性,对于图像中存在较大尺度和角度变化的情况下仍能提取出稳定的特征点。
2.SURF算法:SURF(Speeded Up Robust Features)算法是一种快速的特征点提取算法,它在SIFT算法的基础上进行了优化。
SURF算法使用Haar小波响应来检测图像中的特征点,并使用积分图像来加速计算过程。
此外,SURF算法还使用了一种基于方向直方图的特征描述方法,能够提取出具有旋转不变性和尺度不变性的特征点。
3.ORB算法:ORB(Oriented FAST and Rotated BRIEF)算法是一种快速的特征点提取和匹配算法。
该算法结合了FAST角点检测算法和BRIEF描述符算法,并对其进行了改进。
ORB算法利用灰度值的转折点来检测图像中的角点,并使用二进制字符串来描述关键点,以提高特征点的匹配速度。
ORB算法具有较快的计算速度和较高的匹配精度,适用于实时应用。
4.BRISK算法:BRISK(Binary Robust Invariant Scalable Keypoints)算法是一种基于二进制描述符的特征点提取和匹配算法。
该算法首先使用田字形格点采样方法检测关键点,然后使用直方图来描述关键点的方向和纹理特征。
最后,BRISK算法使用二进制字符串来表示关键点的描述符,并使用汉明距离来进行特征点的匹配。
BRISK算法具有较快的计算速度和较高的鲁棒性,适用于大规模图像匹配任务。
总结起来,图像特征点提取及匹配算法是计算机视觉领域中的重要研究方向。
本文介绍了一些常用的特征点提取及匹配算法,并对其进行了讨论。

surf算法代码-回复什么是Surf算法Surf算法(Speeded Up Robust Features)是一种用于图像特征检测和描述的计算机视觉算法。
它是在2006年由Herbert Bay等人提出的,旨在提高图像处理中的特征点检测与匹配的速度和准确性。
Surf算法在计算机视觉和图像处理领域中得到广泛应用,它的主要目标是在图像中找到稳定且唯一的局部特征点。
Surf算法的步骤1. 尺度空间构建:Surf算法在图像中使用多尺度空间来有效地检测特征点。
它通过不断模糊图像,并计算模糊后的图像与原始图像的差异来构建多尺度空间。
算法使用一个高斯滤波器来进行图像模糊,并通过逐渐增加滤波器的方差来构建不同尺度下的图像。
这样做的目的是使得算法能够在不同尺度下检测到特征点,而不受图像缩放的影响。
2. 关键点检测:在构建好尺度空间后,Surf算法会在每个尺度中检测关键点。
关键点是那些在图像中具有稳定尺度和位置,并且对缩放、旋转和光照变化具有不变性的点。
Surf算法使用Hessian矩阵来检测关键点。
Hessian矩阵是一个用于测量图像局部变化的矩阵,在Surf算法中,它被用来检测图像中的高强度点。
3. 关键点定位:在检测到关键点后,Surf算法会对关键点进行精确定位。
它使用一个Haar 小波响应来定位关键点的位置和方向。
Haar小波是一种多尺度基函数,它能够识别出图像中的边缘和纹理特征。
Surf算法利用Haar小波响应来定位出关键点的具体位置和方向,以便后续的特征描述步骤。
4. 特征描述:在完成关键点定位后,Surf算法会对每个关键点进行描述,以便后续的特征匹配。
Surf算法使用了一种叫做加速权重积分(Fast Hessian)的方法来生成特征描述子。
特征描述子是一个向量,它能够描述关键点周围区域的结构和纹理信息。
Surf算法会通过计算关键点周围区域的灰度变化来生成特征描述子。
5. 特征点匹配:在完成特征描述后,Surf算法会使用一种叫做KD树的数据结构来进行特征点的匹配。
SIFTSURFORBFAST特征提取算法比较SIFTSURF是一种常用的特征提取算法,可以在计算机视觉和图像处理领域中应用于目标检测、图像匹配、图像检索等任务。
SIFT(尺度不变特征变换)和SURF(加速稳健特征)是两个非常流行的特征提取算法。
本文将比较SIFT和SURF两种算法的特征提取能力、计算时间以及对尺度和旋转不变性的描述。
首先,SIFT算法通过关键点检测和特征描述两个步骤来提取特征。
它采用了尺度空间极值点检测算法,通过在不同的尺度下寻找极值点来检测关键点。
然后,对每个关键点进行方向估计,使得特征具有旋转不变性。
最后,通过计算关键点周围邻域的梯度直方图来描述特征。
与SIFT算法不同,SURF算法使用了一种快速的尺度不变特征检测算法。
它通过使用Hessian矩阵来检测尺度空间的极值点,并使用盒式滤波器来加速计算。
SURF算法还使用了Haar小波特征描述符来表示关键点周围的图像区域。
这种特征描述符可以很快地计算出来,并且具有较好的尺度和旋转不变性。
在特征提取能力方面,SIFT算法通常可以提取到较为鲁棒和准确的特征。
它对于尺度和旋转的变化具有较好的不变性,可以在不同的图像中进行匹配。
然而,由于SIFT算法使用了较为精细的特征描述子,它对图像的变形和光照变化比较敏感。
相比之下,SURF算法对于图像的光照和变形变化较为鲁棒。
它使用了快速的特征检测算法和计算方法,因此在大规模图像匹配和实时处理中有较好的性能。
在计算时间方面,SIFT算法相对而言比较耗时。
它需要在多个尺度下进行高斯模糊和差分运算来检测极值点,并且在计算特征描述子时需要对高斯图像进行插值和积分。
相比之下,SURF算法使用了快速的盒式滤波器和Haar小波特征描述符,因此计算速度较快。
尤其是在处理大规模图像集合或实时视频流时,SURF算法具有明显的优势。
总的来说,SIFT和SURF是两种有效的特征提取算法,它们在特征描述、计算时间和鲁棒性方面有一些差异。
SURF算法在图像处理中的应用SURF算法是一种被广泛应用于计算机视觉领域的算法,其全称是Speeded Up Robust Features。
它是一种特征提取算法,可以在图像中检测出具有特殊性质的关键点,并生成具有鲁棒性的特征描述子。
这些特征可以用于识别相似的图像,比较相似度,并在图像配准、图像跟踪、三维重建等领域中发挥重要作用。
本文将探讨SURF算法在图像处理中的应用。
一、 SURF算法的原理SURF算法是基于SIFT算法的一种改进,它的主要优势在于速度更快、鲁棒性更强。
下面简单介绍SURF算法的原理。
1. 尺度空间构建SURF算法首先对原始图像进行尺度变换,通过高斯金字塔来构建尺度空间。
尺度空间的不同层次可以检测到不同大小的特征。
通过不同层次检测的关键点可以估计出原始图像中的关键点,这个过程被称为尺度空间极值点检测。
2. 关键点定位在尺度空间中,SURF算法通过Hessian矩阵的行列式求解得到图像局部极值点位置,这些点是具有高强度、对光照变化鲁棒等性质的关键点。
3. 方向确定为了使SURF算法对旋转和光照变化更加鲁棒,需要为每个关键点确定一个主方向,这个方向是在关键点周围采用Hessian矩阵主方向确定的。
4. 特征描述为了描述关键点的局部特征,SURF算法使用了一种统计学上的方法,即将关键点周围的区域分解成小的子区域,每个子区域在水平和竖直方向上计算Haar小波变换,形成特征向量。
这些特征向量组成的特征描述子具有鲁棒性,可以用来评估关键点的稳定性。
5. 特征匹配在进行图像匹配时,SURF算法使用了一种快速的近似最近邻搜索方法,称为快速最近邻搜索(FLANN)。
它可以在大规模的特征库中快速找到与查询特征最相似的特征。
二、 SURF算法可以被广泛应用于图像处理中,下面介绍一些应用领域。
1. 图像配准SURF算法可以被用来匹配两幅图像之间的关键点,通过计算两幅图像中关键点的相似度来实现图像配准。
常用的特征描绘子在计算机视觉和图像处理领域,特征描绘子是用于描述图像中的特定属性或纹理信息的数学表示。
特征描绘子对于图像匹配、对象识别和图像检索等任务非常重要。
下面将介绍一些常用的特征描绘子。
1.SIFT(尺度不变特征变换):SIFT是一种用于在不同尺度上检测和描述局部特征的算法。
它通过应用高斯滤波器来寻找具有高灵敏度的关键点,并使用关键点周围的局部图像区域来构建描述子。
SIFT特征具有尺度不变性和旋转不变性,因此在大规模图像检索和对象识别中广泛应用。
2. SURF(加速稳健特征):SURF是一种基于Hessian矩阵的局部特征描述子。
它通过计算图像中的灰度变化率来检测特征点,并构建了一种基于梯度直方图的描述子。
SURF特征具有尺度不变性、旋转不变性和光照不变性,且计算速度比SIFT更快,因此适用于实时图像处理任务。
3.ORB(方向鲁棒特征):ORB是一种结合了FAST角点检测器和BRIEF特征描述子的特征描绘子。
它通过检测图像中的角点,并使用二进制描述子来描述这些角点的特征。
ORB特征具有尺度不变性、旋转不变性和仿射不变性,且计算速度比SIFT和SURF都更快,因此适用于实时图像处理应用。
4.HOG(方向梯度直方图):HOG是一种用于物体检测和人体姿态估计的特征描述子。
它通过计算图像中局部区域的梯度直方图来描述图像的形状和纹理信息。
HOG特征在人体检测和行人识别等任务中表现出色,并且对于图像的尺度和旋转变化具有一定的鲁棒性。
5.LBP(局部二值模式):LBP是一种用于纹理分析和表情识别的特征描述子。
它通过将局部图像区域与其周围像素比较,并将比较结果编码为二进制数来描述纹理特征。
LBP特征在纹理分类和人脸识别等任务中表现出色,并且对于光照变化和噪声干扰具有一定的鲁棒性。
除了上述特征描绘子,还有许多其他的常用特征描绘子,如GIST(总体图像特征)、BRISK(加速旋转不变特征)、FREAK(快速稳定特征)等。
SURF与FLANN算法结合的图像匹配方法
SURF(Speeded Up Robust Features)是一种图像特征提取算法,FLANN(Fast Library for Approximate Nearest Neighbors)是一种快速最近邻搜索算法。
将这两种算法结合起来,可以实现高效准确的图像匹配。
图像匹配是指在一组图像中,找到与给定图像最相似的图像。
图像匹配在图像检索、
目标跟踪、增强现实等领域具有广泛的应用。
SURF算法对图像进行特征提取。
SURF算法通过检测图像中的关键点,并计算这些关键点的局部特征向量来描述图像。
SURF算法的特点是快速且具有稳定的鲁棒性,适用于各种图像变化情况。
接下来,FLANN算法将SURF提取的特征向量作为输入,构建一个近似最近邻搜索索引。
FLANN算法通过将特征向量映射到一个高维空间,并使用一种适合于高维空间的快速搜索
算法来找到与给定特征向量最相似的特征向量。
FLANN算法的特点是高效且具有较高的准
确性,适用于大规模的高维数据搜索。
通过计算匹配图像与给定图像之间的相似度,选取相似度最高的图像作为匹配结果。
相似度可以使用欧式距离、余弦相似度等度量方法进行计算。
选取相似度最高的图像作为
匹配结果,可以通过设置一个阈值进行筛选,只选择相似度超过阈值的图像。
图像匹配方法的优势在于可以处理图像的尺度、旋转、光照等变化,并具有较高的准
确性和鲁棒性。
将SURF与FLANN算法结合起来,不仅可以提高算法的速度和效率,还可以提高算法的准确性和鲁棒性。
这种图像匹配方法在实际应用中具有很大的潜力。