第六讲:二阶对称张量及其主轴化
- 格式:pdf
- 大小:238.76 KB
- 文档页数:8


对称的变形速率张量对称的变形速率张量是描述物体在变形过程中各个方向上的变形速率的张量。
在材料力学领域中,变形速率张量是一个重要的概念,它可以帮助我们理解和分析物体的变形特性。
变形速率张量是一个二阶张量,具有三个主轴和三个主值。
其中的主轴对应着物体的主要变形方向,而主值则表示了物体在该方向上的变形速率大小。
对称的变形速率张量具有一个重要的特性,即其主轴与物体的对称轴一致。
这意味着物体在变形过程中,对称轴上的变形速率是相同的,而其他方向上的变形速率可能不同。
为了更好地理解对称的变形速率张量,我们可以以一个弹性材料的拉伸变形为例。
当一个弹性材料受到拉伸力时,其会发生变形,形成一个拉伸状态。
在这个过程中,材料会沿着拉伸方向发生线性的变形,而在垂直于拉伸方向的方向上则几乎不变形。
这意味着材料的变形速率在拉伸方向上是最大的,而在垂直于拉伸方向的方向上则是最小的。
因此,这个变形过程中的变形速率张量是对称的。
对称的变形速率张量在实际工程中有着广泛的应用。
例如,在材料的弹性和塑性变形分析中,对称的变形速率张量可以帮助我们确定材料的变形特性和应力分布情况。
此外,在流体力学中,对称的变形速率张量也被用来描述流体的剪切变形和应变率分布。
在工程实践中,我们通常使用应变率传感器来测量物体的变形速率。
这些传感器可以将物体的变形速率转化为电信号,从而实现对变形速率的测量。
通过测量不同方向上的变形速率,我们可以得到对称的变形速率张量的主值和主轴。
这些数据可以用于进一步分析和设计工程结构。
对称的变形速率张量是描述物体在变形过程中各个方向上的变形速率的重要工具。
它的应用范围广泛,可以帮助我们理解和分析材料和流体的变形特性,以及设计和优化工程结构。
通过测量和分析变形速率张量,我们可以更好地理解物体的变形行为,并应用于实际工程中。

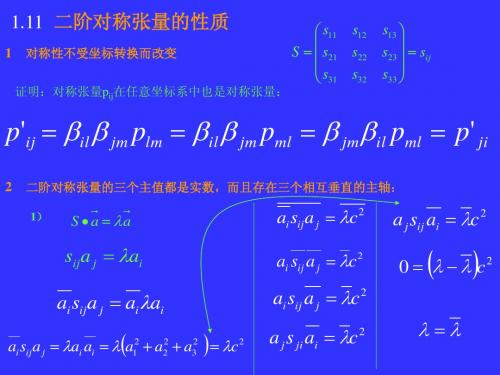
第二章:二阶张量1. ij T ij ji i j j i i j T T T ;=⊗=⊗=⊗T g g T g g g g ij i j ij i j T ; T =⋅⋅=⋅⋅g T g g T g2. T =T.u u.TT ij ij ij ij j i j i i j j i ( = T T u ;T T u )⋅⊗==⊗⋅=u.T u g g g T.u g g u g 3.i .j det()T =T行列式不等于零的二阶张量定义为正则二阶张量 正则二阶张量存在逆张量:1-⋅T T =G 4.主不变量①1)()()ζ⋅⋅⨯⋅⋅⨯⋅⨯⋅=⋅⨯T u (v w)+u (T v w)+u (v T w )u (v w)(1.()::i i Tr T ζ====T T G G T)()()i j k ijk S u v w ⋅⋅⨯⋅⋅⨯⋅⨯⋅=T u (v w)+u (T v w)+u (v T w )(m m mijk .i mjk .j imk .k ijm S T T T εεε=++由于mik imkmmmiik .i mik.i imk.k iimS T T T εεεεε=-⇓=++=当i,j,k 当中有两个相等时,0iik S = 当i j k ≠≠时i j k m ijk .i .j .k ijk not sum ijk .m ijk S (T T T )T εε=++=②2)[)][()(]()[()]()ξ⋅⋅⋅⨯⋅⋅⨯⋅⋅⋅⨯⋅=⋅⨯T u (T v w +u T v T w)+T u (v T w u v w (2......122123323113.1.2.1.2.2..3.2..3.3.1.3.1112233.1.2.2..3.3.1223311.1.2.2..3.3.111()22ij l mi j i l lm i j i j l j T T T T T T T T T T T T T T T T T T T T T T T T TTTTT T ζδ==-=-+-+-=++注意:ij ijklm lmkδδ=是张量的分量张量T 行列式中各阶主子式之和)[)][()(]()[()]i j k ijk S u v w ⋅⋅⋅⨯⋅⋅⨯⋅⋅⋅⨯⋅=T u (T v w +u T v T w)+T u (v T w ( 其中......()m n m n n mijk i j mnk j k imn k i mjn S T T T T T T εεε=++..........()0m n m n n m iik i i mnk i k imn k i min m n i i mnk m n i i nmk iik S T T T T T T T T T T S εεεεε=++===-=当i,j,k 当中有两个相等时,0iik S = 当i j k ≠≠时 (122123323113).1.2.1.2.2..3.2..3.3.1.3.12()()i j j i j k k j k i i k ijk i j i j j k j k k i k i ijk not sumijkijkijkS T T T T T T T T T T T T T T T T T T T T T T T T εεζε=-+-+-=-+-+-=③()[()()]det()()⋅⋅⋅⨯⋅=⋅⨯T u T v T w T u v w...()[()()]()()()i j k l m nl m n ijkl m n lmn T T T u v w det u v w det εε⋅⋅⋅⨯⋅===⋅⨯T u T v T w T T u v w ④()()det()()T T -⋅⨯⋅=⨯T v T w T v w()[()()]det()()[()()]det()()T⋅⋅⋅⨯⋅=⋅⨯⋅⋅⋅⨯⋅=⋅⨯T u T v T w T u v w u T T v T w T u v w由于上式对任意矢量u 都成立[()()]det()()()()det()()T T-⋅⋅⨯⋅=⨯⋅⨯⋅=⨯T T v T w T v w T v T w T T v w⑤主不变量与矩之间的关系*1*2..*3...()()()ii i kk i i j kj k i Tr T Tr T T Tr T T T ζζζ===⋅==⋅⋅=T T T T T T2212112212ij k li j j i kl .i .j .i .j .i .j *T T (T T T T )[()]ζδζζ==-=-3.....................*3***13121611()()661(()23)6ijk l m nlmn i j ki j k j k i k i j j i k i k j k j i i j k i j k i j k i j k i j k i j k e e T T T T T T T T T T T T T T T T T T T T T ζζζζζ==++-++=+- 二阶张量标准形 1. 特征值、特征向量 λ⋅=T v v ()λ-⋅=T G v 01111232221233331230.........T T T T T T T T T λλλ--=-特征方程 321230λζλζλζ-+-= 特征根是不变量2. 实对称二阶张量标准形 1. 特征根是实根*************; ; ()0 () λλλλλλλλ⋅=⋅=⋅⋅=⋅⋅⋅=⋅-⋅=⇒=⋅-=⇒=N v N v v v N v v v v N v v v v v N v v 0v v2. 特征向量互相正交1112222112112212121212 ; ; ()00λλλλλλ⋅=⋅=⋅⋅=⋅⋅⋅=⋅-⋅=⇒⋅=N v v N v v v N v v v v N v v v v v v v 3. 不存在约当链如果λ是n 重根,但不存在相应的特征向量12,v v ,使1122 ; λλ⋅=⋅=T v v T v v则一定存在约当链11221λλ⋅=⋅=+T v v T v v v然而对对称张量112212112121211110λλλλ⋅=⋅=+⇓⋅⋅=⋅⋅⋅=⋅+⋅⇓⋅=N v v N v v v v N v v v v N v v v v v v v这是不可能的。

§3.3 应变的坐标变换与应变张量学习思路:与应力状态分析相同,一点的应变分量在不同坐标系下的描述是不相同的,因此讨论应变状态,就必须建立坐标变换,就是坐标转动时的应变分量变换关系。
本节通过新坐标系与旧坐标系之间的位移变换关系式,根据几何方程,通过复合函数的微分,就可以得到应变分量的转轴公式。
转轴公式表明应变张量也是二阶对称张量.根据转轴公式,一点的六个独立的应变分量一旦确定,则任意坐标系下的应变分量均可确定,即应变状态完全确定。
应变状态分析表明:坐标变换后各个应变分量均发生改变,但是作为一个整体,一点的应变状态是不会改变的。
学习要点:1. 坐标变换;2. 应变分量坐标转轴公式;3. 应变张量。
应变可以描述一点的变形,即对微分平行六面体单元棱边的伸长以及棱边之间夹角的改变做出定义。
但是这还不足以完全描述弹性体的变形,原因是应变分析仅仅讨论了棱边伸长和夹角变化,而没有考虑微分单元体位置的改变,即单元体的刚体转动。
通过分析弹性体内无限邻近两点的位置变化,则可得出刚体的转动位移与纯变形位移之间的关系。
设P点无限邻近O点,P点及其附近区域绕O作刚性转动,转过微小角度。
设转动矢量为ω,OP之间的距离矢量为,如图所示。
则引入拉普拉斯算符矢量设P点的位移矢量为U,有U =u i +u j +u k由于位移矢量可以表示为U =ω×,所以即其中x,y, z为转动分量,是坐标的函数,表示了弹性体内微分单元体的刚性转动。
设M点的坐标为(x,y,z),位移(u,v,w).与M点邻近的N点,坐标为(x+d x,y+d y,z+d z),位移为(u+d u,v+d v,w+d w)。
则MN两点的相对位移为(d u,d v,d w)。
因为位移为坐标的函数,所以同理可得以上位移增量公式中,前三项为产生变形的纯变形位移,后两项是某点邻近区域的材料绕该点像刚体一样转动的刚性转动位移.刚性转动位移的物理意义为, 如果弹性体中某点及邻近区域没有变形,则与某点无限邻近这一点的位移,根据刚体动力学可知,是由两部分组成。
⼆阶对称张量的⽰性⾯
⼆阶对称张量的⽰性曲⾯
⼆阶对称张量与⼆次曲⾯
1(,1,2,3)
ij i j S x x i j ==⼆阶曲⾯
i ki k
j lj l x a x x a x ′=′
=1ij ki lj k
l S a a x x ′′=kl
ij ki lj S S a a ′=kl
ki lj ij S a a S ′=
光率体
称⼆次曲⾯包围的椭球为光率体?椭球⾯上⽮径的长度即为折射率?沿晶体不同⽅向传输具有不同的折射率我们可以获得相互垂直两个偏振态在晶体某个波⽮⽅向的折射率。
K D E S
⊥⊥
折射率曲⾯
为什么研究折射率曲⾯
研究⽅便
形象直观
如何获得折射率曲⾯
取任意过晶体中⼼的直线⽅向为光线传输⽅向
利⽤该⽅向⽮量定义该⽅向过晶体中⼼的垂直截⾯,求出它与光率体外表⾯的交线(椭圆)
求该椭圆的长轴和短轴
由于取得⽅向任意获得的即为椭圆长短轴曲⾯-即两互相垂直偏振态的折射率曲⾯。