多自由度体系强迫振动
- 格式:ppt
- 大小:949.00 KB
- 文档页数:40
强迫振动,振动系统在周期性的外力作用下,其所发生的振动称为受迫振动,这个周期性的外力称为驱动力。
受迫振动也称强迫振动.在外来周期性力的持续作用下,振动系统发生的振动称为受迫振动.这个“外来的周期性力”叫驱动力(或强迫力)。
中文名
强迫振动
要求
周期性的外力
含义
外力下振动系统发生的振动
发生对象
振动系统
分为两大类:单自由度强迫振动多自由度强迫振动
1,单自由度系统强迫振动
1)旋转时恒英气的强迫振动:在旋转机械中,旋转失衡是使系统振动的外界激励的主要来源,如:发动机的曲轴,飞轮,车轮,车辆传动系统的齿轮,机床的主轴,洗衣机,空调和冰箱的压缩机,风扇等等。
旋转失衡的主要原因是高速旋转机械中转动部分的质量中心和转轴中心不重合造成的。
2)支撑运动引起的强迫振动:强迫振动不一定都是由激扰力引起的,振动系统支座的周期运动同样可以引发强迫振动。
例如精密仪表受到基座振动的影响而振动,如果支撑的运动可以用简谐函数来描述,则系统的振动也可以用简谐强迫振动理论来分析。
支撑运动的运动和受力简图
单自由度强迫振动的运用实例。

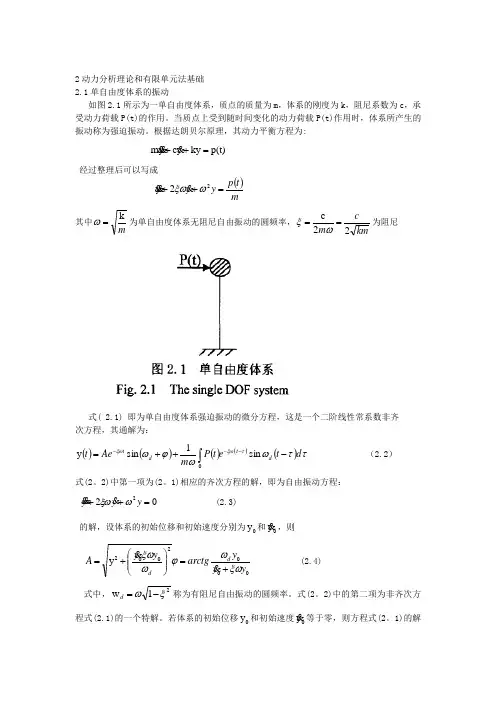
2动力分析理论和有限单元法基础 2.1单自由度体系的振动如图2.1所示为一单自由度体系,质点的质量为m ,体系的刚度为k ,阻尼系数为c ,承受动力荷载P(t)的作用。
当质点上受到随时间变化的动力荷载P(t)作用时,体系所产生的振动称为强迫振动。
根据达朗贝尔原理,其动力平衡方程为:p(t)ky y c ym =++ 经过整理后可以写成()mt p y y =++22y ωξω其中m k =ω为单自由度体系无阻尼自由振动的圆频率,kmc m 22c ==ωξ为阻尼式( 2.1) 即为单自由度体系强迫振动的微分方程,这是一个二阶线性常系数非齐次方程,其通解为:()()()()()ττωωϕωτξωξωd t e t P m Ae t d t d t -++=---⎰sin 1sin y 0(2.2) 式(2。
2)中第一项为(2。
1)相应的齐次方程的解,即为自由振动方程:022=++y y yωξω (2.3) 的解,设体系的初始位移和初始速度分别为0y 和0y,则 0002002y y y y arctg y y A d d ξωωϕωξω+=⎪⎪⎭⎫ ⎝⎛+= (2.4) 式中,21w ξω-=d 称为有阻尼自由振动的圆频率。
式(2。
2)中的第二项为非齐次方程式(2.1)的一个特解。
若体系的初始位移0y 和初始速度0y等于零,则方程式(2。
1)的解()()()τωτξωd et P m t t td--⎰=1y (2.5)它可以用来计算单自由度体系对于任何给定的加载过程的弹性动力反应,当荷载P(t)能用简单的数学式子表示时,上式能用解析方法进行计算。
然而地震时地面运动是没有规律性的,很难用一个关于时间函数的式子来表达,通常采用数值积分。
对于地震荷载,一般来说必须计算加载过程中一连串时间的反应,此时采用从一时刻到下一时刻递增地进行计算较为方便。
2.2多自由度体系的振动2.2.1多自由度体系的振动方程假设所讨论的体系具有n 个自由度,体系的质点1m 、2m 、3m 、···n m 受到相应外力i p (t)的作用,各质点在其静力平衡位置附近振动。
第七章多自由度体系的动力响应分析在第七章中,我们将学习多自由度体系的动力响应分析。
多自由度体系是指由多个部件或质点相互作用而构成的体系,在动力学中具有广泛应用。
其动力学行为比单自由度体系更为复杂,需要采用不同的方法进行分析。
多自由度体系的动力响应分析可分为两个主要步骤:建立动力学模型和求解动力学方程。
首先,我们需要根据实际问题建立多自由度体系的动力学模型。
常见的模型包括单自由度体系的推广、多质点系统和连续体模型等。
根据问题的特点选择合适的模型是十分重要的。
其次,我们需要求解多自由度体系的动力学方程。
一般来说,动力学方程可以通过运动方程和力学关系两个方面来建立。
运动方程描述了系统的几何特征,力学关系则描述了系统受到的力和约束。
通常,我们采用拉格朗日方程或哈密顿方程来建立动力学方程,并通过使用牛顿—克尔系统简化计算过程。
在求解动力学方程之后,我们可以通过模拟和分析来获得多自由度体系的动力响应。
常见的动力响应包括自由振动、强迫振动和阻尼振动等。
自由振动是指系统在无外力作用下的自我周期性振动。
强迫振动是指系统受到外界力作用而产生的振动。
阻尼振动是指系统在存在耗散力的情况下的振动。
在分析多自由度体系的动力响应时,我们还需要考虑共振现象和模态分析。
共振是指外界激励频率与系统固有频率相等时产生的特殊现象。
通过研究系统的固有频率和激励频率之间的关系,我们可以预测系统是否会发生共振,并作出相应的调整。
模态分析则是通过分解系统的振动模态,研究每个模态的特性和相互之间的耦合关系。
通过模态分析,我们可以更好地理解多自由度体系的动力响应。
在实际应用中,多自由度体系的动力响应分析经常涉及到复杂的计算和仿真。
因此,我们可以借助于计算机辅助工具,例如有限元分析和动力学仿真软件,来进行更精确和高效的分析。
总之,多自由度体系的动力响应分析是动力学中的一个重要课题。
它不仅具有理论研究的价值,还具有广泛的工程应用。
通过深入理解和掌握多自由度体系的动力响应分析方法,我们可以更好地分析和设计复杂的工程系统,推动科学技术的进步。
多自由度系统振动微分方程的建立如下图所示三个自由度系统的有阻尼强迫振动,分别用达朗贝尔原理、牛顿第二定律、拉格朗日方程、能量法、虚位移原理建立其振动微分方程。
1、直接平衡法建立方程(1)达朗贝尔原理根据达朗贝尔原理,当系统振动时,将受到干扰力、惯性力、阻尼力以及弹性恢复力作用,这四种力在系统的每一个广义坐标上的分量应保持平衡。
对于n 个自由度结构系统,力的平衡关系可以表示成为:)(t P F F F S D I =++I F 为惯性力列阵,D F 为阻尼力列阵;S F 为弹性恢复力列阵)(t P 为干扰力列阵。
设系统位移矢量为Tn t y y y y Y ]......,[21=,则: ..X M F I =, .X C F D = , KX F S = ∴)(...t P KX X C X M =++对以上三自由度系统进行受力分析如下图所示:11x k )(1t F )(122x x k - )(2t F )(233x x k - )(3t F.11x c ..11x m .1.22)(x x c - ..22x m .2.33)(x x c - ..33x m由达朗贝尔原理列平衡方程:1m :0)()()(..11.11.1.22111221=---+--+x m x c x x c x k x x k t F1m2m 3m2k2c3k 3c1k 1c1x2x3x)(1t F )(2t F)(3t F1m2m2m2m :0)()()()()(..22.1.22.2.331222332=----+---+x m x x c x x c x x k x x k t F 3m :0)()()(..33.2.332333=-----x m x x c x x k t F整理得:⎪⎪⎩⎪⎪⎨⎧=+-+-=-++--++-=-++-++)()()()()()()(33323.33.23..3323323212.33.232.12..22122121.22.121..11t F x k x k x c x c x m t F x k x k k x k x c x c c x c x m t F x k x k k x c x c c x m 写成矩阵形式得:⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--+--++⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--+--++⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡)()()(0)(0)(0)(0)(00000321321333322221.3.2.1333322221..3..2..1321t F t F t F x x x k k k k k k k k k x x x c c c c c c c c c x x x m m m 2、牛顿第二定律由牛顿第二定律建立上述系统振动微分方程,与达朗贝尔原理类似,分析各质量单元受力图,只是此时将不加惯性力。
强迫振动一.单自由度体系对任意荷载的反应(single-degree -of-freedom-system ) 1.1时域分析法—Duhamel 积分 1、单位脉冲反应函数定义:作用时间很短,冲量等于一的荷载,即δ函数 δ函数定义: 0lim →ε)(τδε-t =)(τδ-t ={其他,,0τ=∞t 且1)(0=-⎰∞dt t τδδ函数的筛选性:)()()(ττδf dt t t f =-⎰+∞∞-在t=τ时刻,单位脉冲)()(t t p δ=作用在SDOFsys 上,使结构获得一个单位冲量,脉冲结束后,质点获得一个一个初速度,即m ⎰⎰++===+εττεττδετ1)()()(dt t dt t p u当0→ε,mu1)(=τ 0)(=x u (因为时间短,未激起位移) 单位脉冲作用下的反应(responce )相当于给出一个初始条件:,0)(=τu mu1)(=τ 下的自由振动 将其代入单自由度体系的自由振动的一般解 ,得:(单位脉冲反应函数一般用)(τ-t h 表示):无阻尼体系: m kn =ω (对于单自由度扭转,Jk Q n =ω Q K :扭转刚度; J:转动惯量)ττωωτ≥-==-t t t m t u t h n n)],(sin[1)()( 有阻尼体系: 21ξωω-=n D ττωωττξω≥-==---t t e m t u t h D t Dn )],(sin[1)()()(2.对任意函数的反应将荷载分解成一系列脉冲,然后求得每一个脉冲作用下的结构反应,最后叠加各结果求得结构总反应。
将任意荷载离散成一系列脉冲及各脉冲作用下的反应:任一脉冲)(τp τd 作用下的反应:=)(t du ττττ≥-t t h d p ),()(SDOF体系在任意时间t的总反应就是t之前所有脉冲作用下反应之和: τττd t h p t u t)()()(0-=⎰将前后)(τ-t h 表达式带入得:无阻尼体系:ττωτωd t p m t u n tn)](sin[)(1)(0-=⎰有阻尼体系:ττωτωτξωd t e p m t u D t tDn )](sin[)(1)()(0-=--⎰若初始条件不为零,则Duhamel积分给出: 无阻尼:τττωωωd t h p t ut u t u tn nn )()(s i n )0(c o s )0()(0-++=⎰无阻尼:ττωτωτττωωτξωξωd t e p m d t h p t B t A et u D t tDtD D tn n )](sin[)(1)()()sin cos ()()(0-+-++=---⎰⎰(A、B由初始条件定)1.2频域分析法—Fourier 变换法 1.Euler 公式:x i x e ixsin cos += 1,2-==ππi ie e icosx=2/)(ix ix e e -+, i e e x ix ix 2/)(sin --=, )sin (cos y i y e e e e x iy x iy x +==+2.Fourier 积分:设f(x)为周期2l 的函数,并满足狄利克雷条件,则)sin cos (2)(10x l n b x l n a a x f n n n ππ++=∑∞= xdx ln f l b xdx l n f l a l l n l l n ⎰⎰--==ππsin 1,cos1 改写为复数形式:dxex f l c dxec x f x ln i lln x ln in nππ--∞-∞=⎰∑==)(21)(对非周期函数,如果满足狄利克雷条件,)(∞⎰∞∞- dt t f 则可用fourier 积分表示:在fourier 级数公式中,令T=2l,21Tπω=(讲x 改为t,为后面统一符号) 则:∑∞-∞==n tin n ex t f 1)(ω (1)dt e t f Tx t in T T n 12/2/)(1ω--⎰=(2)当0→T (因为是周期函数),由πω21d T =有:ωωπd T==12 ωωω==1n n 则:ωωπωωππωωωd e x d e x d e x t f t i n t in nti n n n )(21)2(21)(⎰∑∑∞∞-===其中:dte tf dt e t f d d dt e t f T d x d x t i t ti t t d t T T t i n n n n ωωπωωπωωπωπωπω-∞∞-∞→--=--⎰⎰⎰⇒⇒⇒=)()(2*2])(1[22)(2/2/212/2/2带入)(令())(称为当t )(,t ),()(f x x x n ωωω∞→=的fourier 变换。
多自由度体系的动力响应分析多自由度体系的动力响应分析是研究多个质点或刚体组成的系统在外界作用下的运动规律和响应特性的一项重要课题。
多自由度体系是指由多个相对独立的质点或刚体组成的系统,其中每个质点或刚体都可以在三个方向上自由运动,因此系统具有多个自由度。
多自由度体系的动力学方程可由牛顿第二定律推导得出,即∑F = ma,其中∑F 表示作用在系统中各质点上的合力,m 表示质点的质量,a 表示质点的加速度。
根据每个质点的运动规律,可以得到系统在不同自由度上的运动方程。
为了简化多自由度体系动力学方程的求解,常采用试解法和模态分析法。
试解法是假设质点的位置和速度可以用特定的试解函数表示,然后将试解函数代入动力学方程中,从而得到未知系数的值。
模态分析法则是将系统的自由度进行正交分解,得到一组特征向量和特征值,将试解函数表示为特征向量的线性组合。
通过求解特征值问题,可以得到系统的固有频率和模态振型,从而分析系统的动力响应。
自由振动是指在没有外界作用的情况下,多自由度体系在初始时刻给定的初始条件下的运动。
通过求解系统的运动方程,可以得到质点位置随时间的变化规律。
自由振动的特点是系统在固有频率上做周期性的振动,同时各自由度之间存在能量的转移和耦合。
强迫振动是指在外界施加周期性的激励力下,多自由度体系的运动。
外界激励力的形式可以是单频、多频或宽频带等。
通过求解系统的运动方程,可以得到系统在激励力作用下的动力响应。
强迫振动的特点是系统在激励频率附近发生共振现象,振幅会显著增大。
阻尼振动是指当多自由度体系存在阻尼力的情况下的振动。
阻尼力可以分为线性阻尼和非线性阻尼两种情况。
线性阻尼是指阻尼力与质点速度成正比的情况,非线性阻尼是指阻尼力与质点速度的高阶项有关的情况。
根据阻尼力的形式,可以得到不同类型的阻尼振动方程。
求解阻尼振动方程,可以得到系统的动力响应,包括振动幅值、相位和能量耗散等。
多自由度体系的动力响应分析在工程领域有广泛的应用。