多自由度体系自由振动
- 格式:ppt
- 大小:5.97 MB
- 文档页数:7
多自由度系统的振动模态分析振动是物体在受到外界作用力或受到初始扰动后产生的周期性运动。
在工程领域中,多自由度系统的振动模态分析是一项重要的研究内容。
本文将介绍多自由度系统的振动模态分析的基本原理和方法。
一、多自由度系统的定义多自由度系统是指由多个相互连接的质点组成的系统。
每个质点都可以在三个坐标方向上自由运动,因此系统的自由度就是质点的个数乘以每个质点的自由度。
多自由度系统的振动模态分析可以帮助我们了解系统的固有振动特性,为工程设计和结构优化提供依据。
二、振动模态的概念振动模态是指多自由度系统在固有频率下的振动形态。
每个固有频率对应一个振动模态,振动模态的数量等于系统的自由度。
振动模态分析可以帮助我们确定系统在不同频率下的振动特性,从而预测系统的响应和寻找可能的共振点。
三、振动模态分析的方法1. 模态分析方法模态分析是一种通过数学方法求解系统的固有频率和振动模态的方法。
常用的模态分析方法包括有限元法、模态超级位置法等。
有限元法是一种基于离散化的方法,将系统分割成有限个小单元,通过求解每个单元的振动特性,最终得到整个系统的振动模态。
模态超级位置法是一种基于物理原理的方法,通过测量系统在不同频率下的振动响应,推导出系统的振动模态。
2. 模态参数的计算模态参数是指描述振动模态特性的参数,包括固有频率、振型、振幅等。
模态参数的计算可以通过实验测量和数值模拟两种方法。
实验测量是通过激励系统,测量系统在不同频率下的振动响应,并通过信号处理和频谱分析等方法计算出模态参数。
数值模拟是通过建立系统的数学模型,利用计算机仿真软件求解系统的振动模态。
四、振动模态分析的应用振动模态分析在工程领域有广泛的应用。
首先,振动模态分析可以帮助工程师了解系统的固有振动特性,从而优化设计和改善结构。
其次,振动模态分析可以用于故障诊断和预测,通过对系统的振动模态进行监测和分析,可以判断系统是否存在异常或潜在故障。
此外,振动模态分析还可以应用于声学工程、航天工程、汽车工程等领域。
多自由度体系在地面运动作用下的振动方程我们要找出多自由度体系在地面运动作用下的振动方程。
首先,我们需要了解多自由度体系的振动方程的基本形式。
多自由度体系的振动方程通常由以下形式给出:
M{ddot x} + C{dot x} + Kx = F(t)
其中:
M 是质量矩阵,
C 是阻尼矩阵,
K 是刚度矩阵,
x 是位移向量,
{dot x} 是速度向量,
{ddot x} 是加速度向量,
F(t) 是外部作用力向量。
对于地面运动作用下的振动,我们需要考虑地面的运动对体系的影响。
假设地面以速度 v 和加速度 a 运动,那么地面的运动可以表示为:
x_ground = vt + at^2
其中 x_ground 是地面的位移。
由于地面和体系是相互作用的,我们需要将地面的位移和加速度引入到振动方程中。
具体来说,我们需要将地面的位移和加速度作为外部作用力加入到方程的右边。
因此,多自由度体系在地面运动作用下的振动方程为:
M{ddot x} + C{dot x} + Kx = -Kx_ground
其中 x_ground 是地面的位移,由地面的速度和加速度决定。
第三章 多自由度系统振动多自由度系统和单自由度系统的振动特性是有区别的。
单自由度系统受初始扰动后,按系统的固有频率作简谐振动。
多自由度系统有多个固有频率,当系统按某一个固有频率作自由振动时,各独立坐标在振动过程中相互关系是固定的,这个关系叫振幅比,也叫作主振型或模态。
主振型是多自由度系统以及弹性体振动的重要特征。
多自由度系统的振动方程是多个二阶微分方程组,这些方程一般是耦合的。
多自由度振动的求解有两种方法:直接积分法和振型叠加法。
直接积分法可直接根据微分方程求出响应,涉及的概念不多且有应用软件,本章不做介绍。
振形叠加法要先求出系统的固有频率和振型,在此基础用叠加法求响应,物理概念清楚、并且是模态分析与参数识别的理论基础。
因此本章将先用较多的篇幅介绍多自由度系统的固有振动特性、振型叠加法和传递函数。
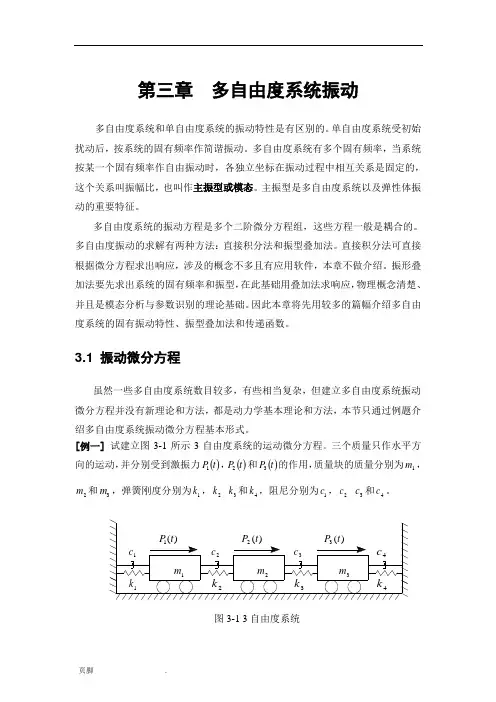
3.1 振动微分方程虽然一些多自由度系统数目较多,有些相当复杂,但建立多自由度系统振动微分方程并没有新理论和方法,都是动力学基本理论和方法,本节只通过例题介绍多自由度系统振动微分方程基本形式。
[例一] 试建立图3-1所示3自由度系统的运动微分方程。
三个质量只作水平方向的运动,并分别受到激振力()t P 1,()t P 2和()t P 3的作用,质量块的质量分别为1m ,2m 和3m ,弹簧刚度分别为1k ,2k 3k 和4k ,阻尼分别为1c ,2c 3c 和4c 。
图3-1 3自由度系统解:分别用三个独立坐标1x ,2x 和3x 描述三个质量块的运动,坐标原点分别取在1m ,2m 和3m 的静平衡位置。
质量块的速度分别为1x,2x 和3x ,加速度分别为1x,2x 和3x 。
每个质量块的受力图如3-2(a 、b 、c )所示,则由受力图根据牛顿第二定律,得系统的运动方程为:图3-2 (a) 图3-2(b)图3-2(c))()()(1212112121111t P x x c x c x x k x k xm +------= )()()()()(232321232321222t P x x c x x c x x k x x k x m +---+---= )()()(3343233432333t P x c x x c x k x x k xm +--+--= 或)()()(1221212212111t P x k x k k x c x c c xm =-++-++ )()()(23323212332321222t P x k x k k x k x c x c c x c x m =-++--++- )()()(3343233432333t P x k k x k x c c x c xm =++-++- 上述方程组可以用矩阵表示为:⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--+--++⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--+--++⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡)()()(000032132143333222213214333322221321321t P t P t P x x x k k k k k k k k k k x x x c c c c c c c c c c x x x m m m三个二阶微分方程是耦合的,这是因为矩阵中有非零的非对角元素。
31 多自由度体系的自由振动计算(刚度法)图1图1a 示一具有n 个集中质量的无重简支梁,它是n 个自由度的体系。
设振动时其上任一质点m i 上的位移为y i ,作用于该质点上的惯性力,可列出n 个动力平衡方程为m y t i i −()k ik 表示图1b 示支座k 发生单位位移在支座i 所产生的反力,即刚度系数。
ikk 1nm km im 1m )b ()a (n y n -m k y k -m y -m 1y 1-m m i1n n n n n n n n nn n m yt k y t k y t k y t m yt k y t k y t k y t m yt k y t k y t k y t ++++=++++=++++=1111112212221122221122()()()()0()()()()0()()()()0(a )式(a )可用矩阵形式表示如下:(b )(c )设=+ωαy Y t sin()}{}{Y Y Y Y n T=12][}{M Y K Y −+=ω02}{}{][}{][M y K y +=0}{}{][}{][K M Y −=ω()02}{}{][][(d )为了得到的非零解,应使系数行列式为零,即:Y K M −=ω02][][(e )n 个自由度的频率方程n n n n n n nn n m m m y t y t y t k k k k k k k k k y t y t y t 121211121212221212()()()()()()0000⎡⎣⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎡⎣⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥+⎡⎣⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎡⎣⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥=⎡⎣⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥+=M y K y 0}{}{][}{][n =)k k k m k k m k k m k k n n nn nn −−−ωωω(() ()12221222221111212展开上述行列式得到关于ω的2n 次代数方程,求出n 个频率ω1、…、ωn ,其中最小的叫基本频率或第一频率。