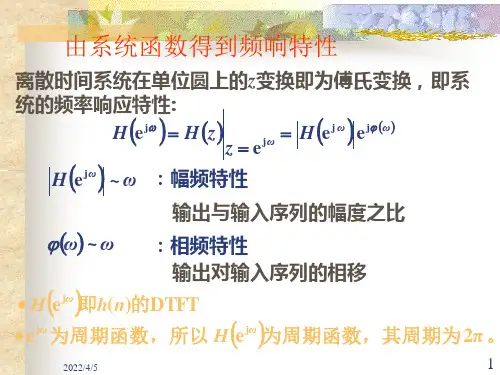
信号与系统——系统函数
- 格式:ppt
- 大小:3.94 MB
- 文档页数:76
信号与系统重点概念公式总结Last updated on the afternoon of January 3, 2021信号与系统重点概念及公式总结:第一章:概论1.信号:信号是消息的表现形式。
(消息是信号的具体内容)2.系统:由若干相互作用和相互依赖的事物组合而成的具有特定功能的整体。
第二章:信号的复数表示:1.复数的两种表示方法:设C 为复数,a 、b 为实数。
常数形式的复数C=a+jba 为实部,b 为虚部;或C=|C|e j φ,其中,22||b a C +=为复数的模,tan φ=b/a ,φ为复数的辐角。
(复平面)2.欧拉公式:wt j wt e jwt sin cos +=(前加-,后变减) 第三章:正交函数集及信号在其上的分解1.正交函数集的定义:设函数集合)}(),(),({21t f t f t f F n =如果满足:n i K dt t f j i dt t f t f i T T i T T j i 2,1)(0)()(21212==≠=⎰⎰则称集合F 为正交函数集如果n i K i ,2,11==,则称F 为标准正交函数集。
如果F 中的函数为复数函数条件变为:ni K dt t f t f j i dt t f t f i T T i i T T j i 2,1)()(0)()(2121**==⋅≠=⋅⎰⎰其中)(*t f i 为)(t f i 的复共轭。
2.正交函数集的物理意义:一个正交函数集可以类比成一个坐标系统;正交函数集中的每个函数均类比成该坐标系统中的一个轴;在该坐标系统中,一个函数可以类比成一个点;点向这个坐标系统的投影(体现为该函数与构成坐标系的函数间的点积)就是该函数在这个坐标系统中的坐标。
3.正交函数集完备的概念和物理意义:如果值空间中的任一元素均可以由某正交集中的元素准确的线性表出,我们就称该正交集是完备的,否则称该正交集是不完备的。
如果在正交函数集()()()()t g n ,t g ,t g ,t g 321之外,不存在函数x (t )()∞<<⎰2120t t dt t x ,满足等式:()()⎰=210t t i dt t g t x ,则此函数集称为完备正交函数集。
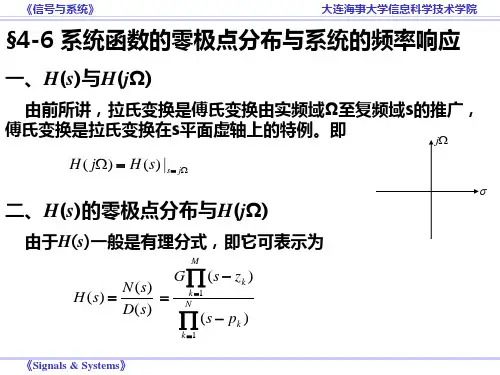
【信号与系统】03-系统函数的性质1. 系统函数的性质1.1 变换的对偶性 不管是傅⾥叶变换的频域还是拉普拉斯变换的s域(下⾯统称s域),都是深⼊讨论LIT系统的有⼒⼯具,有时甚⾄是必备⼯具。
s域的系统函数和时域的信号(单位冲激响应)是⼀对共⽣体,它们通过拉普拉斯变换⽣成彼此,同时也是连接两个域的纽带。
对⼀个函数解析式,经常要对它做⼀些常规的分析操作,⽐如运算、平移、缩放、微积分、卷积等。
⼀个很⾃然的问题是,在某个域的分析操作会对另⼀个域带来什么影响呢?本篇就来讨论这个问题。
在正式讨论之前,有必要再回顾⼀下拉普拉斯变换的公式。
你可能⼀开始就注意到,正反变换存在⼀定的“对称性”,⽽仅在局部有微⼩差别。
在数学上,两个概念如果通过类似的⽅法互相定义,它们就称为对偶的,从形式上不难看出,互为对偶的概念的性质也是对偶存在的,这就省去了相似论证的⿇烦。
信号x(t)和拉普拉斯变换H(s)之间不具有严格的对偶性,但这样的相似性仍然可以被使⽤。
如果记χ(ω)=eσ√2πX(σ+jω),将得到更为对称的式(1),把这个关系记作变换T,显然有式(2)成⽴。
以后变换的性质如果本⾝不是对称的,可以运⽤该式迅速得到另⼀个对称的性质,当然简单的性质直接证明会更快。
x(t)=1√2π∫∞−∞χ(ω)e jωt dω;χ(ω)=1√2π∫∞−∞x(t)e−jωt d t x(t)T↔χ(ω)⇔χ(t)T↔x(−ω)1.2 拉普拉斯变换的性质 以下按函数运算的复杂程度,罗列LT的基本性质,过于直⽩的结论不加证明。
需要注意的是,性质成⽴有它⾃⼰的ROC,并不完全受限于原LT的ROC。
还有我们知道,ROC和积分在具体的s上的收敛性是不同的,以下性质在ROC外的收敛点仍然可以是成⽴的。
⾸先是函数的线性运算,在s域也是线性的(式(3))。
然后看函数的平移,容易有式(4)左成⽴,在s域的平移还有式(4)右成⽴,这是⼀组对偶性质。
当对函数进⾏伸缩时,频谱系数也跟着反⽐例伸缩(式(5)左);特别地,a=−1时表⽰函数左右翻转(旋转180度),s域则也跟着旋转180度(式(5)右)。
信号与系统实验常用函数function:在MATLAB中不是它的自带函数就可以完成所有功能,更多的时候是自己编写程序来实现我们要的功能,这时就要用到此命令,调用格式为:function ****( ) 括号外面为函数名称,括号中为函数中要用到的变量。
plot命令:plot命令是MATLAB中用来绘制用向量表示法(在下一章中讲到)表示的连续信号的波形。
它的功能是将向量点用直线依次连接起来。
调用格式:plot(k,f),其中k和f是向量。
ezplot命令:ezplot命令是用来绘制用符号运算表示法表示的连续信号的波形。
调用格式:ezplot(f,[t1,t2]),其中[t1,t2]为一时间范围,f为以t为变量的函数。
title命令:在绘图命令中,我们可以用此命令来对绘制出来的波形做一些注释,以便后期我们做图形处理。
调用格式为:title(‘……’) 中间部分可以任意对图形进行注释的文字。
xlabel、ylabel命令:这两个也是来对绘制出来的波形做标注用的,可以标注出两个坐标轴的未知数的意义,增加图形中的信息量。
调用格式:xlabel(‘……’),ylabel(‘……’) 中间可以是对坐标轴做注释的文字或字母。
axis命令:此命令可以来定义绘制波形中坐标的范围。
调用格式为:axis([k1,k2,g1,g2]),其中k1,k2表示横坐标的范围,g1,g2表示纵坐标的范围。
syms命令:在符号表示法中,可以用此命令来定义变量。
调用格式为:syms t 意思是定义一个变量t。
sym命令:是符号表示法中的调用系统自带函数的命令。
调用格式为:f=sym(‘……’) 中间为系统能识别的常用信号,如正弦信号,nte 等。
stem命令:此命令专门用来绘制离散序列的波形。
调用格式为:stem(k,f) 调用此命令可以绘制出离散序列的点状图。
subs命令:此可以将连续信号中的时间变量t用t-t0,at等等来替换,从而可以完成信号在时域范围内的变换。
信号与系统复习书中最重要的三大变换几乎都有。
第一章 信号与系统 1、信号的分类①连续信号和离散信号 ②周期信号和非周期信号 连续周期信号f (t )满足f (t ) = f (t + m T ), 离散周期信号f(k )满足f (k ) = f (k + m N ),m = 0,±1,±2,…两个周期信号x(t),y(t)的周期分别为T 1和T 2,若其周期之比T 1/T 2为有理数,则其和信号x(t)+y(t)仍然是周期信号,其周期为T 1和T 2的最小公倍数。
③能量信号和功率信号 ④因果信号和反因果信号2、信号的基本运算(+ - × ÷) 2.1信号的(+ - × ÷)2.2信号的时间变换运算 (反转、平移和尺度变换) 3、奇异信号3.1 单位冲激函数的性质f (t ) δ(t ) = f (0) δ(t ) , f (t ) δ(t –a) = f (a) δ(t –a)例: 3.2序列δ(k )和ε(k ) f (k )δ(k ) = f (0)δ(k ) f (k )δ(k –k 0) = f (k 0)δ(k –k 0) 4、系统的分类与性质4.1连续系统和离散系统4.2 动态系统与即时系统 4.3 线性系统与非线性系统 ①线性性质 T [a f (·)] = a T [ f (·)](齐次性) T [ f 1(·)+ f 2(·)] = T[ f 1(·)]+T[ f 2(·)] (可加性)②当动态系统满足下列三个条件时该系统为线性系统:)0(d )()(f t t t f =⎰∞∞-δ)(d )()(a f t a t t f =-⎰∞∞-δ?d )()4sin(91=-⎰-t t t δπ)0('d )()('f t t f t -=⎰∞∞-δ)0()1(d )()()()(n n n f t t f t -=⎰∞∞-δ4)2(2])2[(d d d )(')2(0022=--=--=-==∞∞-⎰t t t t tt t t δ)(1||1)()()(t a a at n n n δδ⋅=)(||1)(t a at δδ=)(||1)(00a t t a t at -=-δδ)0()()(f k k f k =∑∞-∞=δy (·) = y f (·) + y x (·) = T[{ f (·) }, {0}]+ T[ {0},{x (0)}] (可分解性) T[{a f (·) }, {0}] = a T[{ f (·) }, {0}]T[{f 1(t ) + f 2(t ) }, {0}] = T[{ f 1 (·) }, {0}] + T[{ f 2 (·) }, {0}](零状态线性)T[{0},{a x 1(0) +b x 2(0)} ]= aT[{0},{x 1(0)}] +bT[{0},{x 2(0)}](零输入线性) 4.4时不变系统与时变系统T[{0},f (t - t d )] = y f (t - t d)(时不变性质)直观判断方法:若f (·)前出现变系数,或有反转、展缩变换,则系统为时变系统。
1. 信号:是信息的载体。
通过信号传递信息。
2. 系统:是指若干相互关联的事物组合而成具有特定功能的整体3. 数字信号:仅在一些离散的瞬间才有定义的信号。
4. 模拟信号:在连续的时间范围内(-∞<t<∞)有定义的信号。
5. 连续系统:若系统的输入信号是连续信号,系统的输出信号也是连续信号。
6. 离散系统:若系统的输入信号和输出信号均是离散信号。
7. 动态系统:若系统在任一时刻的响应不仅与该时刻的激励有关,而且与它过去的历史状况有关。
8. 即时系统:不含有记忆元件(电容、电感等)的系统。
9.线性系统:满足线性性质的系统。
10. 因果系统:零状态响应不会出现在激励之前的系统。
11. 连续因果系统的充分必要条件是:冲激响应 h(t)=0,t<0 或者,系统函数H(s)的收敛域为:Re[s]>σ0 12. 离散因果系统的充分必要条件是:单位响应 h(k)=0, k<0 或者,系统函数H(z)的收敛域为:|z|>ρ013. 稳定系统:一个系统,若对有界的激励f(.)所产生的零状态响应y f (.)也是有界时,则称该系统为有界输入有界输出稳定。
14. 时不变系统:满足时不变性质的系统称。
15. 时不变性质:若系统满足输入延迟多少时间,其零状态响应也延迟多少时间。
16. 零状态响应:当系统的初始状态为零时,仅有输入信号f(t)/f(k)的响应。
17. 零输入响应:是激励为零时仅有系统的初始状态{x(0)}所引起的响应。
18. 自由响应:齐次解的函数形式仅与系统本身的特性有关,而与激励f(t)的函数形式无关 19. 强迫响应:特解的函数形式由激励确定,称为强迫响应。
20. 冲激响应:当初是状态为零是,输入为单位冲激函数δ(t)所引起的零状态响应。
21. 阶跃响应:当初是状态为零是,输入为单位阶跃函数所引起的零状态响应。
22. 正交:定义在(t 1,t 2)区间的两个函数ϕ 1(t)和ϕ 2(t),若满足23.完备正交函数集:如果在正交函数集{ϕ1(t), ϕ 2(t),…, ϕ n(t)}之外,不存在函数φ(t)(≠0)满足⎰=21d )()(t t i t t t ϕϕ ( i =1,2,…,n)。