有限元方法 第五章 平面三角形单元
- 格式:ppt
- 大小:1.12 MB
- 文档页数:90
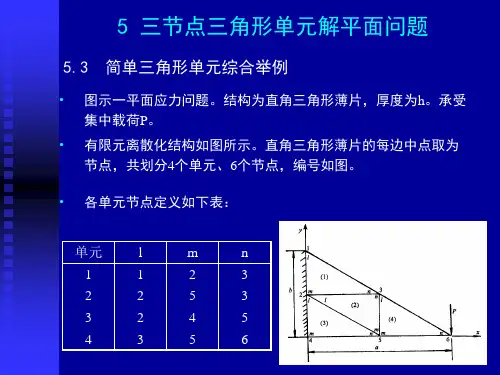
平面三角形单元有限元程序设计P9 m 9 m一、题目如图1所示,一个厚度均匀的三角形薄板,在顶点作用沿板厚方向均匀分布的竖向载荷。
已知:P=150N/m,E=200GPa,=0、25,t=0、1m,忽略自重。
试计算薄板的位移及应力分布。
要求:1.编写有限元计算机程序,计算节点位移及单元应力。
(划分三角形单元,单元数不得少于30个);2.采用有限元软件分析该问题(有限元软件网格与程序设计网格必须一致),详细给出有限元软件每一步的操作过程,并将结果与程序计算结果进行对比(任选取三个点,对比位移值);3.提交程序编写过程的详细报告及计算机程序;4.所有同学参加答辩,并演示有限元计算程序。
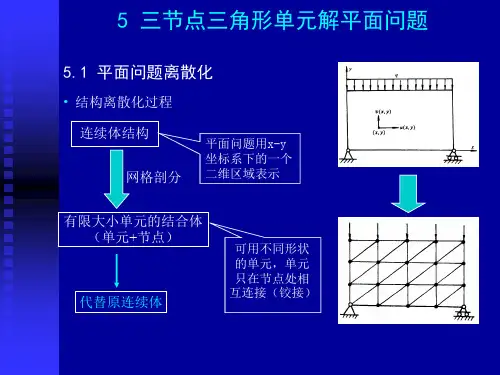
有限元法中三节点三角形分析结构的步骤如下:1)整理原始数据,如材料性质、荷载条件、约束条件等,离散结构并进行单元编码、结点编码、结点位移编码、选取坐标系。
2)单元分析,建立单元刚度矩阵。
3)整体分析,建立总刚矩阵。
4)建立整体结构的等效节点荷载与总荷载矩阵5)边界条件处理。
6)解方程,求出节点位移。
7)求出各单元的单元应力。
8)计算结果整理。
一、程序设计网格划分如图,将薄板如图划分为6行,并建立坐标系,则刚度矩阵的集成建立与总刚度矩阵等维数的空矩阵,已变单元刚度矩阵的集成。
由单元分析已知节点、单元的排布规律,继而通过循环计算求得每个单元对应的节点序号。
通过循环逐个计算:(1)每个单元对应2种单元刚度矩阵中的哪一种; (2)该单元对应总刚度矩阵的那几行哪几列 (3)将该单元的单元刚度矩阵加入总刚度矩阵的对应行列循环又分为3层循环:(1)最外层:逐行计算(2)中间层:该行逐个计算(3)最里层:区分为第 奇/偶 数个计算XYPXYP节点编号单元编号单元刚度的集成:[][][][][][]''''''215656665656266256561661eZeeeZeZeeeekkkKkkkkkk+⋯++=⇓=⇒==⇒==⇒=⨯⨯⨯⨯⨯⨯M边界约束的处理:划0置1法适用:这种方法适用于边界节点位移分量为已知(含为0)的各种约束。
matlab有限元三角形单元程序以下是一个简单的 MATLAB 有限元三角形单元程序的示例:```matlab% 定义模型参数E = 1000; % 弹性模量nu = 0.3; % 泊松比thickness = 1; % 板的厚度% 定义节点坐标nodes = [0, 0; 1, 0; 1, 1; 0, 1; 0.5, 0.5];% 定义单元连接关系connectivity = [1, 2, 5; 2, 3, 5; 3, 4, 5; 4, 1, 5];% 计算总节点数和总单元数numNodes = size(nodes, 1);numElements = size(connectivity, 1);% 初始化全局刚度矩阵和载荷向量K = zeros(numNodes);F = zeros(numNodes, 1);% 循环遍历每个单元for i = 1:numElements% 查找当前单元的节点编号nodesIndex = connectivity(i, :);% 根据节点编号从全局坐标矩阵中取出节点坐标coordinates = nodes(nodesIndex, :);% 计算当前单元的局部刚度矩阵localK = calculateLocalStiffness(E, nu, thickness, coordinates);% 组装局部刚度矩阵到全局刚度矩阵中K(nodesIndex, nodesIndex) = K(nodesIndex, nodesIndex) + localK;% 计算当前单元的局部载荷向量localF = calculateLocalLoad(thickness, coordinates);% 组装局部载荷向量到全局载荷向量中F(nodesIndex) = F(nodesIndex) + localF;end% 边界条件:节点1固定K(1, :) = 0;K(1, 1) = 1;F(1) = 0;% 解线性方程组U = K \ F;% 输出位移结果disp('节点位移:');disp(U);% 计算应力结果stress = calculateStress(E, nu, thickness, nodes, connectivity, U);% 输出应力结果disp('节点应力:');disp(stress);% 计算局部刚度矩阵的函数function localK = calculateLocalStiffness(E, nu, thickness, coordinates)% 计算单元的雅可比矩阵J = (1/2) * [coordinates(2,1)-coordinates(1,1), coordinates(3,1)-coordinates(1,1);coordinates(2,2)-coordinates(1,2), coordinates(3,2)-coordinates(1,2)];% 计算雅可比矩阵的逆矩阵invJ = inv(J);% 计算单元刚度矩阵B = invJ * [-1, 1, 0; -1, 0, 1];D = (E/(1-nu^2)) * [1, nu, 0; nu, 1, 0; 0, 0, (1-nu)/2]; localK = thickness * abs(det(J)) * (B' * D * B);end% 计算局部载荷向量的函数function localF = calculateLocalLoad(thickness, coordinates) localF = zeros(3, 1);midPoint = [sum(coordinates(:,1))/3,sum(coordinates(:,2))/3];localF(3) = thickness * 1 * det([coordinates(1,:); coordinates(2,:); midPoint]);end% 计算各节点应力的函数function stress = calculateStress(E, nu, thickness, nodes, connectivity, U)stress = zeros(size(nodes, 1), 3);for i = 1:size(connectivity, 1)nodesIndex = connectivity(i, :);coordinates = nodes(nodesIndex, :);Ke = calculateLocalStiffness(E, nu, thickness, coordinates);Ue = U(nodesIndex);stress(nodesIndex, :) = stress(nodesIndex, :) + (Ke * Ue)';endstress = stress / thickness;end```这个程序实现了一个简单的平面三角形单元有限元分析,包括定义节点坐标和单元连接关系、计算全局刚度矩阵和载荷向量、施加边界条件、解线性方程组、计算节点位移和应力等。

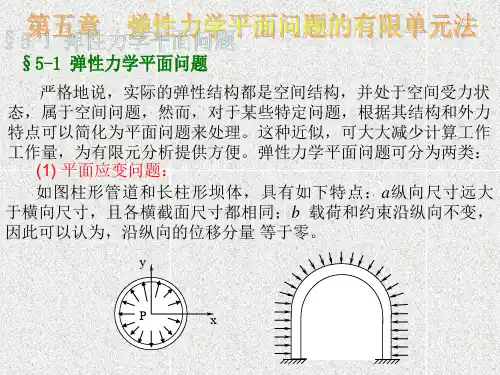
第五章 等(Isoparametric Elements)在前面的章节中我们已经认识了三角形单元和矩形单元。
这两种单元的边均为直边,用直边单元离散曲边的求解域势必要用更多的单元数才能较准确地描述实际边界。
本章将要介绍的等参数单元是目前应用最广的一类单元,可用这类单元更精确的描述不规则的边界。
这类单元的出现不仅系统的解决了构造协调位移单元的问题,而且自然坐标系的描述方法也广泛为其他类型的单元所采用。
等参数单元在构造形函数时首先定义一个规则的母体单元(参考单元),在母体单元上构造形函数,再通过等参数变换将实际单元与母体单元联系起来。
变换涉及两个方面:几何图形的变换(坐标变换)和位移场函数的变换,由于两种变换采用了相同的函数关系(形函数)和同一组结点参数,故称其为等参数变换。
§5-1四结点四边形等参数单元1、母体单元 自然坐标和形函数母体单元ê :边长为2的正方形,自然坐标系ξ,η 示于图5-1。
取四个角点为结点,在单元内的排序为1、2、3、4。
仿照矩形单元,可定义出四个形函数显然有如下特点:(i )是ξ,η的双线性函数 (ii )(iii)2、实际单元与母体单元之间的坐标变换(1) 坐标变换设xy 平面上的实际单元e 由母体单元经过变换F 得到,即 且规定结点(ξi ,ηi )与结点(x i , y i )对应(i =1~4)。
这样的变换不只一个,利用(5-1-1)定义的形函数即可写出这种变换中的一个1图5-1 ())4~1()1(141),(=++=i N i i i ηηξξηξ),(ηξi N ⎩⎨⎧=≠=i j i i N ij i 当 当 =10),(δηξ),(ηξi N 1)1)(1(41)1)(1(41)1)(1(41)1)(1(41),(41≡+-++++-++--=∑=ηξηξηξηξηξi i N e e F →: (5-1-2) (5-1-1) ii i i i i y N y x N x ⋅=⋅=∑∑==4141),(),(ηξηξ(5-1-3)(5-1-3)所定义的变换有如下特点:x , y 是ξ,η的双线性函数。
在第一章中已阐明位移模式就是:单元内任意一点的位移,被表述为其坐标的函数。
在平面问题的单元中,任一点的位移分量可用下列多项式表示;显然位移模式的项数取得越多,计算也越精确,但是项数取得越多,待定系数61,。
z,…A1,P z,…也就越多,根据第一章64所述,待定系数是通过代入节点坐标及其位移而确定的。
所以一般要根据有几个节点才可确定取几项。
表4—1列出几种平面单元的位移模式。
为了使有限元的解能够收敛于精确解,任何单元的位移模式都必须满足以下三个条件:1、位移模式中必须包括反应刚体位移的常数项。
刚体位移是单元的基本位移,当单元作刚体位移时,单元内各点的位移值均相等,而和各点的坐标值无关。
显然式(4.1)中的常数项就是提供刚体移的。
2、位移模式中必须包括反应常应变的线性位移项。
当单元分割得十分细小时,单元中的应变就接近于常量。
所以选取的位移模式就必须反应这一点,由第一章可知线性位移项就是提供常应变的。
单元的位移模式满足了上述两个条件者,称为完备单元。
3、位移模式必须能保证单元之间位移的连续性。
在连续弹性体中位移是连续的,所以分割成许多单元后,相邻单元的位移必须保持连续,这就要使相邻单元的公共边界具有相同的位移,以避免发生两相邻单元互相脱离或互相位侵入的现象。
这种连续性在有的文献中称为协调性或相容性。
现在具体分析几种单元的位移模式。
图4—1表示两个相邻的三节点三角形单元,其公共节点『及m的位移对两个单元是一样,由于三节点三角形单元的位移模式是坐标的线性函数,公共边用M 在变形后仍是一条直线,所以上述两个相邻单元在iM边上的任意一点都具有相同位移,从而保证了连续性。
图4—2表示两个相邻矩形单元,其公共边界是M M,相当于y=常数的一条直线,由表4—l可知矩形单元的位移模式是,当y=常数,位移分量M是按线性变化的,所以和前例同样的推理,可以证明两个相邻矩形单元的位移在公共边界上是连续的。
对于六节点的三角形单元及八节点的矩形单元,在单元边界上位移分量是按抛物线变化的,而每条公共边界上有三个公共节点,正好可以保证相邻两单元位移的连续性。
《有限元作业》年级2015级学院机电工程学院专业名称班级学号学生2016年05月如下图所示为一受集中力P作用的结构,弹性模量E为常量,泊松比V=1/6,厚度为I=1。
按平面应力问题计算,运用有限元方法,分别采用三角形及四边形单元求解,求节点位移及单元应力(要求三角形单元数量不少于4个,四边形单元不少于2个)图(一)图(二)三角形单元求解图(三)四边形单元求解(1)如图划分三角形单元,工分成四个分别为④(2)如图分别进行编号1、2、3、4、5、6,并建立坐标系(3)编程进行求解,得出结果,其中假设力P=2000N调用Triangle2D3Node_Stiffness函数,求出单元刚度矩阵k1 =1.0e+06 *7.2857 -3.0000 -2.1429 0.8571 -5.1429 2.1429-3.0000 7.2857 2.1429 -5.1429 0.8571 -2.1429 -2.1429 2.1429 2.1429 0 0 -2.14290.8571 -5.1429 0 5.1429 -0.8571 0-5.1429 0.8571 0 -0.8571 5.1429 02.1429 -2.1429 -2.1429 0 0 2.1429k2 =1.0e+06 *5.1429 0 -5.1429 0.8571 0 -0.85710 2.1429 2.1429 -2.1429 -2.1429 0-5.1429 2.1429 7.2857 -3.0000 -2.1429 0.85710.8571 -2.1429 -3.0000 7.2857 2.1429 -5.14290 -2.1429 -2.1429 2.1429 2.1429 0-0.8571 0 0.8571 -5.1429 0 5.1429 k3 =1.0e+06 *2.1429 0 -2.1429 -2.1429 0 2.14290 5.1429 -0.8571 -5.1429 0.8571 0-2.1429 -0.8571 7.2857 3.0000 -5.1429 -2.1429 -2.1429 -5.1429 3.0000 7.2857 -0.8571 -2.14290 0.8571 -5.1429 -0.8571 5.1429 02.1429 0 -2.1429 -2.1429 0 2.1429 k4 =1.0e+06 *2.1429 0 -2.1429 -2.1429 0 2.14290 5.1429 -0.8571 -5.1429 0.8571 0-2.1429 -0.8571 7.2857 3.0000 -5.1429 -2.1429 -2.1429 -5.1429 3.0000 7.2857 -0.8571 -2.14290 0.8571 -5.1429 -0.8571 5.1429 02.1429 0 -2.1429 -2.1429 0 2.1429 调用Triangle2D3Node_Assembly函数,求出总体刚度矩阵求出的节点位移U =-0.00040.00080.00050.00100.00070.0023-0.00070.0026调用Triangle2D3Node_Stress函数,求出应力,S1、S2、S3、中求出的分别为Sx,Sy,SxyS1 =1.0e+03 *-4.4086-0.73483.5914S2 =1.0e+03 *4.4086-0.64050.4086S3 =1.0e+03 *1.8907-1.06012.1093S4 =1.0e+03 *-1.89072.10931.8907二、(1)如图划分四边形单元,工分成四个分别为(2)如图分别进行编号1、2、3、4、5、6,并建立坐标系(3)编程进行求解,得出结果,其中假设力P=2000N调用Quad2D4Node_Stiffness函数,求出单元刚度矩阵调用Quad2D4Node_Assembly函数,求出求出总体刚度矩阵求出节点位移U =0.00120.0017-0.00120.00170.00160.0049-0.00170.0052调用Quad2D4Node_Stress函数,求出单元应力中的的S1、S2、S3分别为Sx,Sy,Sxy应力分量S1 =1.0e+03 *0.0000-0.24782.0000S2 =1.0e+07 *0.68564.1135-1.7137程序附录一、1、三角形单元总程序:E=1e7;NU=1/6;t=1;ID=1;%调用Triangle2D3Node_Stiffness函数,求出单元刚度矩阵k1=Triangle2D3Node_Stiffness(E,NU,t,0,1,0,0,1,1,ID)k2=Triangle2D3Node_Stiffness(E,NU,t,0,0,1,0,1,1,ID)k3=Triangle2D3Node_Stiffness(E,NU,t,1,1,1,0,2,0,ID)k4=Triangle2D3Node_Stiffness(E,NU,t,2,0,2,1,1,1,ID)%调用Triangle2D3Node_Assembly函数,求出总体刚度矩阵KK = zeros(12,12);KK=Triangle2D3Node_Assembly(KK,k1,1,2,3);KK=Triangle2D3Node_Assembly(KK,k2,2,4,3);KK=Triangle2D3Node_Assembly(KK,k3,3,4,5);KK=Triangle2D3Node_Assembly(KK,k4,5,6,3)% 边界条件的处理及刚度方程求解k=KK(5:12,5:12)p=[0;0;0;0;0;0;0;2000]u=k\p%支反力的计算U=[0;0;0;0;u] %为节点位移P=KK*U%调用Triangle2D3Node_Strain函数,求出应变SN1、SN2、SN3中求出的分别为SNx,SNy,SNxyu1=[U(1);U(2);U(3);U(4);U(5);U(6)];u2=[U(3);U(4);U(7);U(8);U(5);U(6)];u3=[U(5);U(6);U(7);U(8);U(9);U(10)];u4=[U(9);U(10);U(11);U(12);U(5);U(6)];SN1=Triangle2D3Node_Strain(0,1,0,0,1,1,u1)SN2=Triangle2D3Node_Strain(0,0,1,0,1,1,u2)SN3=Triangle2D3Node_Strain(1,1,1,0,2,0,u3)SN4=Triangle2D3Node_Strain(2,0,2,1,1,1,u4)%调用Triangle2D3Node_Stress函数,求出应力,S1、S2、S3、中求出的分别为Sx,Sy,Sxyu1=[U(1);U(2);U(3);U(4);U(5);U(6)];u2=[U(3);U(4);U(7);U(8);U(5);U(6)];u3=[U(5);U(6);U(7);U(8);U(9);U(10)];u4=[U(9);U(10);U(11);U(12);U(5);U(6)];S1=Triangle2D3Node_Stress(E,NU,0,1,0,0,1,1,u1,ID)S2=Triangle2D3Node_Stress(E,NU,0,0,1,0,1,1,u2,ID)S3=Triangle2D3Node_Stress(E,NU,1,1,1,0,2,0,u3,ID)S4=Triangle2D3Node_Stress(E,NU,2,0,2,1,1,1,u4,ID)2、求刚度矩阵程序function k=Triangle2D3Node_Stiffness(E,NU,t,xi,yi,xj,yj,xm,ym,ID)%该函数计算单元的刚度矩阵%输入弹性模量E,泊松比NU,厚度t%输入三个节点i、j、m的坐标xi,yi,xj,yj,xm,ym%输入平面问题性质指示参数ID(1为平面应力,2为平面应变)%输出单元刚度矩阵k(6X6)%---------------------------------------------------------------A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammai = xm-xj;gammaj = xi-xm;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);if ID == 1D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];elseif ID == 2D = (E/(1+NU)/(1-2*NU))*[1-NU NU 0 ; NU 1-NU 0 ; 0 0 (1-2*NU)/2]; endk= t*A*B'*D*B;3、求整体刚度矩阵function z = Triangle2D3Node_Assembly(KK,k,i,j,m)%该函数进行单元刚度矩阵的组装%输入单元刚度矩阵k%输入单元的节点编号I、j、m%输出整体刚度矩阵KK%---------------------------------------------------------------DOF(1)=2*i-1;DOF(2)=2*i;DOF(3)=2*j-1;DOF(4)=2*j;DOF(5)=2*m-1;DOF(6)=2*m;for n1=1:6for n2=1:6KK(DOF(n1),DOF(n2))= KK(DOF(n1),DOF(n2))+k(n1,n2);endendz=KK;4、求应变程序function strain=Triangle2D3Node_Strain(xi,yi,xj,yj,xm,ym,u)%该函数计算单元的应变%输入三个节点i、j、m的坐标xi,yi,xj,yj,xm,ym%输入单元的位移列阵u(6X1)%输出单元的应力strain(3X1),由于它为常应变单元,则单元的应变分量为SNx,SNy,SNz%---------------------------------------------------------------A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammaj = xi-xm;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);strain = B*u;5、求应力程序function stress=Triangle2D3Node_Stress(E,NU,xi,yi,xj,yj,xm,ym,u,ID)%该函数计算单元的应力%输入弹性模量E,泊松比NU,厚度t%输入三个节点i、j、m的坐标xi,yi,xj,yj,xm,ym%输入平面问题性质指示参数ID(1为平面应力,2为平面应变),单元的位移列阵u(6X1)%输出单元的应力stress(3X1),由于它为常应力单元,则单元的应力分量为Sx,Sy,Sxy%---------------------------------------------------------------A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammai = xm-xj;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);if ID == 1D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];elseif ID == 2D = (E/(1+NU)/(1-2*NU))*[1-NU NU 0 ; NU 1-NU 0 ; 0 0 (1-2*NU)/2]; endstress = D*B*u;二、1、四边形单元总程序:E=1e7;NU=1/6;h=1;ID=1;%调用Quad2D4Node_Stiffness函数,求出单元刚度矩阵k1= Quad2D4Node_Stiffness(E,NU,h,0,1,0,0,1,0,1,1,ID)k2= Quad2D4Node_Stiffness(E,NU,h,1,0,2,0,2,1,1,1,ID)%调用Quad2D4Node_Assembly函数,求出求出总体刚度矩阵KK=zeros(12,12);KK= Quad2D4Node_Assembly(KK,k1,1,2,3,4);KK= Quad2D4Node_Assembly(KK,k2,3,5,6,4)% 边界条件的处理及刚度方程求解k=KK(5:12,5:12)p=[0;0;0;0;0;0;0;2000]u=k\p%支反力的计算U=[0;0;0;0;u] %为节点位移P=KK*U%调用Quad2D4Node_Stress函数,求出单元应力中的的S1、S2、S3分别为Sx,Sy,Sxy应力分量u1=[U(1);U(2);U(3);U(4);U(5);U(6);U(7);U(8)];u2=[U(5);U(6);U(9);U(10);U(11);U(12);U(7);(8)];S1= Quad2D4Node_Stress(E,NU,0,1,0,0,1,0,1,1,u1,ID)S2= Quad2D4Node_Stress(E,NU,1,0,2,0,2,1,1,1,u2,ID)2、求刚度矩阵程序function k= Quad2D4Node_Stiffness(E,NU,h,xi,yi,xj,yj,xm,ym,xp,yp,ID) %该函数计算单元的刚度矩阵%输入弹性模量E,泊松比NU,厚度h%输入4个节点i、j、m、p的坐标xi,yi,xj,yj,xm,ym,xp,yp%输入平面问题性质指示参数ID(1为平面应力,2为平面应变)%输出单元刚度矩阵k(8X8)%---------------------------------------------------------------syms s t;a = (yi*(s-1)+yj*(-1-s)+ym*(1+s)+yp*(1-s))/4;b = (yi*(t-1)+yj*(1-t)+ym*(1+t)+yp*(-1-t))/4;c = (xi*(t-1)+xj*(1-t)+xm*(1+t)+xp*(-1-t))/4;d = (xi*(s-1)+xj*(-1-s)+xm*(1+s)+xp*(1-s))/4;B1 = [a*(t-1)/4-b*(s-1)/4 0 ; 0 c*(s-1)/4-d*(t-1)/4 ;c*(s-1)/4-d*(t-1)/4 a*(t-1)/4-b*(s-1)/4];B2 = [a*(1-t)/4-b*(-1-s)/4 0 ; 0 c*(-1-s)/4-d*(1-t)/4 ;c*(-1-s)/4-d*(1-t)/4 a*(1-t)/4-b*(-1-s)/4];B3 = [a*(t+1)/4-b*(s+1)/4 0 ; 0 c*(s+1)/4-d*(t+1)/4 ;c*(s+1)/4-d*(t+1)/4 a*(t+1)/4-b*(s+1)/4];B4 = [a*(-1-t)/4-b*(1-s)/4 0 ; 0 c*(1-s)/4-d*(-1-t)/4 ;c*(1-s)/4-d*(-1-t)/4 a*(-1-t)/4-b*(1-s)/4];Bfirst = [B1 B2 B3 B4];Jfirst = [0 1-t t-s s-1 ; t-1 0 s+1 -s-t ;s-t -s-1 0 t+1 ; 1-s s+t -t-1 0];J = [xi xj xm xp]*Jfirst*[yi ; yj ; ym ; yp]/8;B = Bfirst/J;if ID == 1D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];elseif ID == 2D = (E/(1+NU)/(1-2*NU))*[1-NU NU 0 ; NU 1-NU 0 ; 0 0 (1-2*NU)/2]; endBD = J*transpose(B)*D*B;r = int(int(BD, t, -1, 1), s, -1, 1);z = h*r;k = double(z);3、求总体刚度矩阵程序function z = Quad2D4Node_Assembly(KK,k,i,j,m,p)%该函数进行单元刚度矩阵的组装%输入单元刚度矩阵k,单元的节点编号i、j、m、p%输出整体刚度矩阵KK%---------------------------------------------------------------DOF(1)=2*i-1;DOF(2)=2*i;DOF(3)=2*j-1;DOF(4)=2*j;DOF(5)=2*m-1;DOF(6)=2*m;DOF(7)=2*p-1;DOF(8)=2*p;for n1=1:8for n2=1:8KK(DOF(n1),DOF(n2))= KK(DOF(n1),DOF(n2))+k(n1,n2);endendz=KK;4、求应力程序function stress= Quad2D4Node_Stress(E,NU,xi,yi,xj,yj,xm,ym,xp,yp,u,ID) %该函数计算单元的应力%输入弹性模量E,泊松比NU,厚度h,%输入4个节点i、j、m、p的坐标xi,yi,xj,yj,xm,ym,xp,yp,%输入平面问题性质指示参数ID(1为平面应力,2为平面应变)%输入单元的位移列阵u(8X1)%输出单元的应力stress(3X1)%由于它为常应力单元,则单元的应力分量为Sx,Sy,Sxy%---------------------------------------------------------------syms s t;a = (yi*(s-1)+yj*(-1-s)+ym*(1+s)+yp*(1-s))/4;b = (yi*(t-1)+yj*(1-t)+ym*(1+t)+yp*(-1-t))/4;c = (xi*(t-1)+xj*(1-t)+xm*(1+t)+xp*(-1-t))/4;d = (xi*(s-1)+xj*(-1-s)+xm*(1+s)+xp*(1-s))/4;B1 = [a*(t-1)/4-b*(s-1)/4 0 ; 0 c*(s-1)/4-d*(t-1)/4 ;c*(s-1)/4-d*(t-1)/4 a*(t-1)/4-b*(s-1)/4];B2 = [a*(1-t)/4-b*(-1-s)/4 0 ; 0 c*(-1-s)/4-d*(1-t)/4 ;c*(-1-s)/4-d*(1-t)/4 a*(1-t)/4-b*(-1-s)/4];B3 = [a*(t+1)/4-b*(s+1)/4 0 ; 0 c*(s+1)/4-d*(t+1)/4 ;c*(s+1)/4-d*(t+1)/4 a*(t+1)/4-b*(s+1)/4];B4 = [a*(-1-t)/4-b*(1-s)/4 0 ; 0 c*(1-s)/4-d*(-1-t)/4 ;c*(1-s)/4-d*(-1-t)/4 a*(-1-t)/4-b*(1-s)/4];Bfirst = [B1 B2 B3 B4];Jfirst = [0 1-t t-s s-1 ; t-1 0 s+1 -s-t ;s-t -s-1 0 t+1 ; 1-s s+t -t-1 0];J = [xi xj xm xp]*Jfirst*[yi ; yj ; ym ; yp]/8;B = Bfirst/J;if ID == 1D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];elseif ID == 2D = (E/(1+NU)/(1-2*NU))*[1-NU NU 0 ; NU 1-NU 0 ; 0 0 (1-2*NU)/2]; endstr1 = D*B*u;str2 = subs(str1, {s,t}, {0,0});stress = double(str2);。
第2章 弹性力学平面问题有限单元法2.1 三角形单元(triangular Element)三角形单元是有限元分析中的常见单元形式之一,它的优点是:①对边界形状的适应性较好,②单刚形式及其推导比较简单,故首先介绍之。
一、结点位移和结点力列阵设图为从某一结构中取出的一典型三角形单元。
在平面应力问题中,单元的每个结点上有沿x、y两个方向的力和位移,单元的结点位移列阵规定为: 相应结点力列阵为: (式2-1-1){}⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=m j i m ed d d d m j j i v u v u v u i {}ii j j m X Y X (2-1-1)Y X Y iej m m F F F F ⎧⎫⎪⎪⎪⎪⎧⎫⎪⎪⎪⎪⎪⎪==⎨⎬⎨⎬⎪⎪⎪⎪⎩⎭⎪⎪⎪⎪⎪⎪⎩⎭二、单元位移函数和形状函数前已述及,有限单元法是一种近似方法,在单元分析中,首先要求假定(构造)一组在单元内有定义的位移函数作为近似计算的基础。
即以结点位移为已知量,假定一个能表示单元内部(包括边界)任意点位移变化规律的函数。
构造位移函数的方法是:以结点(i,j,m)为定点。
以位移(u i ,v i ,…u m v m 3)为定点上的函数值,利用普通的函数插值法构造出一个单元位移函数。
在平面应力问题中,有u,v 两个方向的位移,若假定单元位移函数是线性的,则可表示成:(,)12u u x y x yααα+46y ==+ 5(,)v v x y x ααα+==+ (2-1-2)a式中的6个待定常数α1 ,…, α6 可由已知的6个结点位移分量(3个结点的坐标)确定。
将13个结点坐标(x i,3iy y i ),(x j,y j ),(x m,y m )代入上式得如下两组线性方程: 12i i u x ααα+3=+12j j j x y u αα=+α+3m y (a)12m m u x ααα=++46i y和5i i v x αα=+α+465j j j x y v αα=+α+46m y (b)5m m v x ααα=++利用线性代数中解方程组的克来姆法则,由(a)可解出待定常数1α 、2α 、3α :211A Aα=22A 3A Aα=3Aα=式中行列式:2111i i 1i i i j m j j m m u x y A u x y u x y =j jm mu y A u y u y =3111i i j jm mx u A 2111i i j j m mAx y A x y x y x u x u ===A为△ijm 的面积,只要A不为0,则可由上式解出:112i i j j a u a u ()m m a u A α=++21(2i ij j bu b u )m m b u A α=++ (C)312i i j j c u c u ()m mc u A α=++i j a x y =−j i y x y =−m i j j i y x y 式中:m m j x y a x a x m m i =−y m y y =−m i j y ym i j b y =− b b j i =− (d)3c m i j x x =− j i c m x x =−m j i c x x =−m iy x y =−m为了书写方便,可将上式记为: a xm i j b i jy y =−(,,) i u j m uu u ruuu u r i jc m x x =−(,,)i j m uuu u r uuu u r)m m N x y u N x y u N x y u =++)m x y v 表示按顺序调换下标,即代表采用i,j,m 作轮换的方式便可得到(d)式。