光纤陀螺
- 格式:ppt
- 大小:902.50 KB
- 文档页数:23
光纤陀螺术语及测试方法一、光纤陀螺原理以萨格耐克〔Sagnac〕效应为根底,由光纤环圈构成的干预仪型角速度测量装置。
当绕其光纤环圈等效平面的垂线旋转时,在环圈中以相反方向传输出的两束相干光之间产生相位差,其大小正比于该装置相对于惯性空间的旋转角速度,通过检测输出光干预强度即反映出角速度的变化。
二、术语及定义1、启动时间光纤陀螺在规定的工作条件下,从加电开始至到达规定性能所需要的时间。
2、零偏当输入角速率为零时,衡量光纤陀螺输出量均值的大小,以规定时间内输出量均值相应的等效输入角速度表示。
不包括由于滞后和加速引起的输出。
3、零偏稳定性当输入角速度为零时,衡量光纤陀螺输出量围绕其均值的离散程度。
以规定时间内输出量的标准偏差相应的等效输入角速度表示,也可称为零漂。
4、零偏重复性在同样条件下及规定间隔时间内,屡次通电过程中,光纤陀螺零偏相对其均值的离散程度。
以屡次测试所得零偏的标准偏差表示。
5、零偏温度灵敏度相对于室温零偏值,由温度变化引起光纤陀螺零偏变化量与温度变化量之比,通常取最大值表示。
6、随机游走系数表征光纤陀螺中角速度输出白噪声大小的一项技术指标,它反映的是光纤陀螺输出的角速度积分〔角度〕随时间积累的不确定性〔角度随机误差〕,也称为角随机游走。
7、标度因数陀螺输出量与输入角速率的比值。
标度因数通常是用某一特定直线的斜率表示。
该直线可以根据在整个输入范围内周期地改变输入量所得到的输入/输出数据,用最小二乘法进行拟合来求得。
8、标度因数非线性度在输入角速度范围内,光纤陀螺输出量相对于最小二乘法拟合直线的最大偏差值与最大输出量之比。
9标度因数重复性在同样条件及规定的角速率下,屡次测量过程中,光纤陀螺标度因数之间的一致程度。
以各次测试所得的标度因数的标准偏差与其平均值之比表示。
10、标度因数温度灵敏度相对于室温标度因数,由温度变化引起的标度因数变化率与温度变化量之比。
通常以最大值表示。
11、频带宽度光纤陀螺频率特性测试中,规定在测得的幅频特性中幅值降低3 dB所对应的频率范围。
一、什么是光纤陀螺?光纤陀螺是一种用于惯性导航的光纤传感器陀螺仪(gyroscope)意即“旋转指示器”,是指敏感角速率和角偏差的一种传感器.光纤陀螺仪是广义上的陀螺仪,是根据近代物理学原理制成的具有陀螺效应的传感器。
因其无活动部件——高速转子,称为固态陀螺仪。
这种新型全固态的陀螺仪将成为未来的主导产品,具有广泛的发展前途和应用前景。
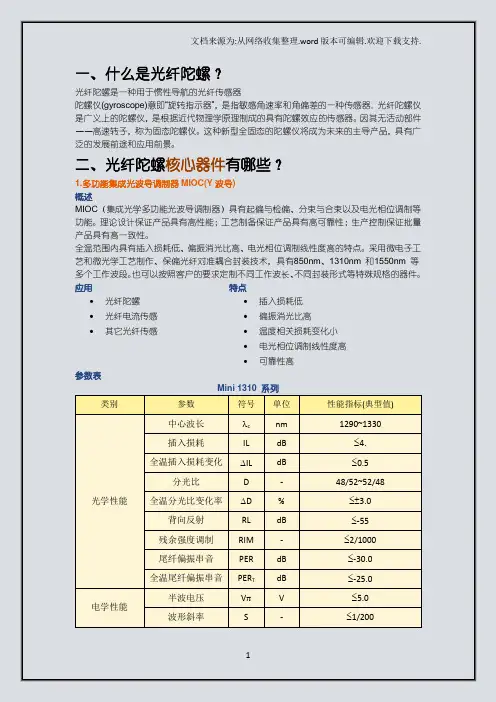
二、光纤陀螺核心器件有哪些?1.多功能集成光波导调制器MIOC(Y波导)概述MIOC(集成光学多功能光波导调制器)具有起偏与检偏、分束与合束以及电光相位调制等功能。
理论设计保证产品具有高性能;工艺制备保证产品具有高可靠性;生产控制保证批量产品具有高一致性。
全温范围内具有插入损耗低、偏振消光比高、电光相位调制线性度高的特点。
采用微电子工艺和微光学工艺制作、保偏光纤对准耦合封装技术,具有850nm、1310nm 和1550nm 等多个工作波段。
也可以按照客户的要求定制不同工作波长、不同封装形式等特殊规格的器件。
应用•光纤陀螺•光纤电流传感•其它光纤传感特点•插入损耗低•偏振消光比高•温度相关损耗变化小•电光相位调制线性度高•可靠性高参数表Mini 1310 系列类别参数符号单位性能指标(典型值)光学性能中心波长λc nm 1290~1330 插入损耗IL dB ≤4.全温插入损耗变化∆IL dB ≤0.5 分光比 D - 48/52~52/48 全温分光比变化率∆D % ≤±3.0 背向反射RL dB ≤-55残余强度调制RIM - ≤2/1000 尾纤偏振串音PER dB ≤-30.0全温尾纤偏振串音PER T dB ≤-25.0电学性能半波电压VπV ≤5.0波形斜率S - ≤1/200带宽WMHz ≥300封装结构封装形式- - 可伐镀金封装器件尺寸- mm 20⨯7⨯4.尾纤类型- - SM/PM,φ125μm/80μm光纤尾纤长度L m ≥1.0环境指标工作温度T W℃-45~70储存温度T S℃-55~851310系列类别参数符号单位性能指标(典型值)优级高级光学性能工作波长λc nm129~1330 插入损耗IL dB ≤3.5全温插入损耗变化∆IL dB ≤0.4 ≤0.5 分束比 D % 50±1.5 50±2.0 全温分光比变化率∆D % ≤1.5 ≤3 背向反射RL dB ≤-55 残余强度调制RIM - ≤5/10000 ≤ 2/1000 尾纤偏串音PER dB ≤-30全温尾纤偏振串音PER T dB ≤-30 ≤-27电学性能半波电压VπV ≤3.5 ≤3.5 波形斜率S - ≤1/250 ≤1/250 带宽BW MHz ≥300封装结构封装形式- - 可伐镀金器件尺寸(不含引脚) - mm 30⨯8⨯5 尾纤类型- - SM/PM,φ125μm/80μm光纤尾纤长度L m 1.2环境指标工作温度T W℃-45~+70储存温度T S℃-55~+851550系列类别参数符号单位性能指标(典型值)优级高级光学性能工作波长λc nm 1530~1570插入损耗IL dB ≤3.5全温插入损耗变化∆IL dB ≤0.3 ≤0.5 分束比 D % 50±2.0全温分光比变化率∆% ≤1 ≤3 背向反射RL dB ≤-55 残余强度调制RIM - ≤5/10000 ≤2/1000 尾纤偏振串音PER dB ≤-30全温尾纤偏振串音PERT dB ≤-30 ≤-27电学性能半波电压VπV ≤3.5 ≤4.0 波形斜率S - ≤1/250 ≤1/250 带宽BW MHz ≥300封装结构封装形式- - 特制可伐镀金器件尺寸(不含引脚) - mm 45⨯9⨯5 30⨯8⨯5 尾纤类型- - SM/PM,φ125μm/80μm光纤尾纤长度L m 1.2环境指标工作温度TW ℃-45~+70储存温度TS ℃-55~+85注1:光纤可以选择快慢轴工作注2:满足Telcordia GR468、GJB548B等标准2.保偏光纤分束器PMFS概述PMFS(保偏光纤分束器)的功能是在保持光波原有偏振态前提下,实现光波功率的分束。
光纤陀螺术语及测试方法光纤陀螺是一种利用光学原理来测量角速度和方向的仪器。
其优点包括精度高、响应速度快、稳定性好等,因此在惯性导航、航天航空、自动控制等领域得到了广泛的应用。
光纤陀螺的术语主要包括以下几个方面:1.动态误差:动态误差是指光纤陀螺在运动过程中由于各种因素导致的测量误差。
例如,由于光纤陀螺的光学元件和机械部件在运动时产生的振动、材料膨胀等原因,会导致测量结果的偏差。
2.静态误差:静态误差是指光纤陀螺在静止不动时由于各种因素导致的测量误差。
例如,由于光纤陀螺的温度变化、光学元件和机械部件的松动等原因,会导致测量结果的偏差。
3.小干扰误差:小干扰误差是指光纤陀螺在受到小幅度干扰时产生的测量误差。
例如,由于光纤陀螺的机械结构和光学元件的松动等原因,会导致测量结果的不稳定性。
4.归零误差:归零误差是指光纤陀螺在归零过程中产生的测量误差。
例如,由于光纤陀螺的光纤光路中存在的偏移、偏振和偏心等原因,会导致归零结果的不准确性。
5.偏置误差:偏置误差是指光纤陀螺在测量过程中产生的零点漂移。
光纤陀螺的偏置误差可能由于温度变化、机械部件磨损等原因引起。
除了以上术语之外,光纤陀螺的测试方法主要包括以下几种:1.静态测试:静态测试是指将光纤陀螺放置在静止的环境中,通过测量其输出信号来评估其静态误差。
常用的方法包括将光纤陀螺与参考陀螺或参考仪器进行比较,以确定其零点漂移等测量误差。
2.动态测试:动态测试是指将光纤陀螺安装在运动的平台上,通过测量其输出信号来评估其动态误差。
常用的方法包括将光纤陀螺与参考陀螺或参考仪器进行比较,以确定其响应速度、线性度等测量性能。
3.带宽测试:带宽测试是指通过改变输入信号的频率,测量光纤陀螺输出信号的变化,以确定其响应频率范围。
常用的方法包括使用正弦波信号作为输入信号,测量光纤陀螺输出信号的幅值和相位变化。
4.稳定性测试:稳定性测试是指通过长时间连续测量光纤陀螺输出信号的变化,以确定其稳定性和长期稳定性。

光纤陀螺技术参数选型1.光纤陀螺工作原理光纤陀螺是一种利用回波光纤中光信号相位差变化来测量转动角速度的设备。
其基本原理是通过光纤传输光信号的相位差变化来实现转动角速度的测量。
2.光纤陀螺技术参数光纤陀螺的技术参数包括测量范围、分辨率、精度、稳定性等。
2.1测量范围光纤陀螺的测量范围是指其能够测量的转动角速度的上下限。
根据具体应用的需求,需要选用合适的测量范围,以保证光纤陀螺可以满足实际测量需要。
2.2分辨率光纤陀螺的分辨率是指其能够测量的最小角速度变化,也可以理解为陀螺仪的感知能力。
分辨率越高,表示光纤陀螺对微小的角速度变化更加敏感。
2.3精度光纤陀螺的精度是指其输出值与实际值之间的误差。
精度越高,表示光纤陀螺的测量结果与实际值之间的偏差越小。
2.4稳定性光纤陀螺的稳定性是指其在长期工作过程中输出值的稳定性能。
稳定性越好,表示光纤陀螺的测量结果在不同环境条件下的波动较小。
3.光纤陀螺技术参数选型方法在确定光纤陀螺的技术参数时,需要综合考虑实际应用需求、成本和技术可行性等因素。
以下是一些常用的光纤陀螺技术参数选型方法:3.1根据应用需求确定测量范围根据实际测量需求,确定光纤陀螺的测量范围。
需要考虑转动角速度的最大值和最小值,以保证光纤陀螺能够满足实际测量需求。
3.2根据应用场景确定分辨率根据应用场景的需求,确定光纤陀螺的分辨率。
一般来说,对于需要测量微小角速度变化的应用,需要选择具有高分辨率的光纤陀螺。
3.3根据应用精度确定精度要求根据应用的精度要求,确定光纤陀螺的精度。
对于需要高精度测量的应用,需要选择具有高精度的光纤陀螺。
3.4根据应用稳定性确定稳定性要求根据应用的稳定性要求,确定光纤陀螺的稳定性。
对于需要长期稳定工作的应用,需要选择具有良好稳定性的光纤陀螺。
4.光纤陀螺技术参数选型的注意事项在进行光纤陀螺技术参数选型时,需要注意以下几个方面:4.1应用需求的准确把握需要充分了解实际应用需求,使技术参数选型更加准确。
光纤陀螺仪原理1. 引言光纤陀螺仪(Fiber Optic Gyroscope,简称FOG)是一种利用光纤和激光干涉原理测量角位移的装置。
光纤陀螺仪工作稳定、精度高、重量轻、体积小、抗振动能力强,广泛应用于航天、航海、火箭、导弹等领域。
本文将详细解释与光纤陀螺仪原理相关的基本原理。
2. 基本原理光纤陀螺仪的工作原理基于光的干涉效应,通过测量光传播路径中的相位差来得到角位移的信息。
光纤陀螺仪主要由光源、分束器、光纤环路和光电探测器等部分组成。
2.1 光源光纤陀螺仪一般采用激光光源作为发射器。
激光具有单色性、方向性和相干性等优点,可以提供稳定的光信号用于测量。
激光源发射出的激光光束经过准直、偏振等处理后,进入光纤环路进行干涉。
2.2 分束器分束器是将激光光束分成两束的光学组件。
一束光沿着光纤环路的顺时针方向传播,称为顺时针光;另一束光沿着逆时针方向传播,称为逆时针光。
2.3 光纤环路光纤环路是光纤陀螺仪的核心部分,由多个光纤组成。
光纤环路通常采用“S”型或“Z”型布局,其目的是使光在环路中传播一定长度,以增大传播时间,提高测量精度。
在光纤环路中,顺时针光和逆时针光通过相同的光纤传输,形成光纤内壁的干涉。
2.4 光电探测器光电探测器用于测量干涉光信号的强度。
光纤环路两端分别安装有光电探测器,用于接收顺时针光和逆时针光经过干涉后的光强信号。
3. 工作过程光纤陀螺仪的工作过程可以分为两个阶段,即初级调零和运行测量。
3.1 初级调零初级调零是为了消除光纤陀螺仪中的零偏误差。
在初级调零过程中,设备会自动采集并记录下零偏误差的数值。
首先,光纤陀螺仪的光源发射激光光束,分束器将光束分成顺时针光和逆时针光,然后它们分别沿着光纤环路传播。
在传播过程中,如果光纤环路没有发生旋转,则顺时针光和逆时针光会以相同的路径传播回来。
当顺时针光和逆时针光在光纤环路两端重新合成时,它们会以特定的相位关系进行干涉。
这种干涉会导致光电探测器接收到的光强发生相应的变化。

光纤陀螺原理
光纤陀螺是一种利用光纤的特性实现转角测量的仪器。
它的工作原理基于Sagnac效应,即当光束在光纤环路中沿两个相反方向传播时,由于旋转而造成的路径长度差会导致干涉,进而产生一个可测量的相位差。
具体来说,光纤陀螺由一个光源、光纤环路、光探测器和控制电路组成。
光源发出的光束通过分光器被均分为两束,分别进入光纤环路的两个入口端。
光在光纤中的传播速度是固定的,但光纤环路的旋转会改变光束在光纤中的传播时间。
当光束传播一周后重新汇合,光束会被分光器重新合并成一个信号,然后被光探测器接收。
如果光纤环路没有旋转,两束光传播的时间是一样的,干涉发生,相位差为零。
但是当光纤环路以角速度ω旋转时,在光纤中沿顺时针方向传播的光束会比逆时针方向传播的光束传播时间短。
这就导致两束光传播的相位差不再为零,而是与角速度ω成比例。
通过将光探测器输出的干涉信号与参考信号进行比较,可以测量出相位差,从而计算出光纤环路的转角。
控制电路可以根据测得的相位差来实时调整光束的光程差,以使得干涉信号保持在理想状态。
光纤陀螺具有高精度、高稳定性和抗干扰能力强的特点,被广泛应用于惯性导航、航天航空等领域。

光纤陀螺的工作原理
光纤陀螺是一种基于光学原理的高精度运动惯量测量仪器,其原
理是利用当光束射入到一个旋转的光纤环路中时,会在光纤环路内发
生一系列干涉现象,从而利用干涉光束相移的变化来测量物体角速度、角位移等运动参数。
光纤陀螺主要由激光器、光源、光纤环路、光电探测器等几个关
键部件组成。
当激光器对光源进行激光,产生一束单色光束,然后将
该光束经过调制后,由一对耦合束分离器分为两路,一路沿顺时针方
向传播,另一路沿逆时针方向传播。
两路光束分别通过光纤环路后,
再次汇聚在耦合器上,随着光纤环路旋转,经过光纤激光束传输的长
度不同,导致从环路内射出的两路光束发生相位差异,这种相位差异
通过光电探测器接收后,就可以计算出物体的角位移和角速度。
与传统的机械陀螺相比,光纤陀螺优点明显,可以提供更高的精度、更宽的测量范围和更长的寿命。
由于光纤陀螺没有耗材和磨损部件,因此可大幅减小维护成本。
此外,光纤陀螺还可以通过多路合成,提高稳定性和精度。
但是,光纤陀螺也存在一些缺点。
例如,光纤陀螺仪器体积较大,价格较高,不便于小型化和成本控制。
此外,光纤陀螺的测量精度受
到环境温度、光纤长度等外部条件的影响,需要对相关技术进行调整
和优化,保证其测量稳定性和精度。
在实际应用中,光纤陀螺广泛用于导航、飞行器、地震监测、结构健康监测、姿态控制等领域。
随着科技的发展,光纤陀螺将其应用范围不断扩展,同时也在不断改进和创新,为人类的科技进步作出了重要贡献。
光纤陀螺的精度和稳定性研究光纤陀螺是一种利用光纤的技术来测量角速度和角位移的设备,它在惯性导航、精密导航和航空航天等领域得到广泛的应用。
其优点在于精度高、稳定性强、寿命长、重量轻以及体积小等特点。
本文将深入探讨光纤陀螺的精度和稳定性研究,为读者带来一份的科学知识。
1. 光纤陀螺介绍光纤陀螺的工作原理是利用旋转光路效应,将激光束从光纤中传入陀螺仪,在单位时间内测量旋转角度和旋转速度,从而得到角速度和角位移的数据。
它与传统的机械陀螺相比,具有更高的精度和稳定性,并且摩擦和磨损小,减少了运动部件的故障和损坏。
2. 精度研究光纤陀螺的精度是指测量角速度和角位移的精度,在实际应用中,这是非常关键的,特别是在高精度测量中。
目前,研究人员采用了多种方法来提高光纤陀螺的精度,例如:采用更高的分辨率、适度地减小量程、优化信号处理算法和补偿噪声等,使测量的误差尽可能地减小。
3. 稳定性研究光纤陀螺的稳定性是指在变化的环境条件下,其测量精度的保持能力。
如果在复杂的环境中,光纤陀螺的稳定性较差,则会影响其应用价值。
因此,研究光纤陀螺的稳定性有着重要的意义。
研究人员通过降低环境温度、减小机械负载、研究隔振系统和优化结构设计等方法提高光纤陀螺的稳定性,并保证其在极端环境下也能够正常工作。
4. 常见应用光纤陀螺在军事、航空航天、自动驾驶等领域得到了广泛的应用。
例如,在惯性导航系统中,光纤陀螺具有更好的性能,能够提供更精确、更可靠的角度测量信息;在飞行模拟中,光纤陀螺能够实时地测量飞机的各种角度信息,从而模拟更精细的飞行过程;在智能机器人中,光纤陀螺可用于机器人运动的控制和姿态稳定等。
5. 未来发展随着技术不断的发展,光纤陀螺的应用也将会越来越广泛。
在未来,研究人员将继续致力于提高光纤陀螺的精度和稳定性,并且开发更多的应用场景。
同时,将适应新的需求和挑战,将光纤陀螺的技术发展到更高的层次。
总之,光纤陀螺的精度和稳定性是其在现实应用中的关键,对于提高光纤陀螺的精度和稳定性有着长期的研究和探索价值。
光纤陀螺原理
光纤陀螺是一种基于光学原理的惯性测量装置,用于测量和感知角速度。
它利用光线在光纤中的传输特性来实现精确的陀螺效应。
在光纤陀螺中,光信号被一个光源产生,并由光纤传输到光接收器。
光信号在光纤中以一定的速度传输,当光纤被转动时,光信号的传播路径会发生变化。
这个变化会引起传输速度的微小改变,进而产生一个相位差。
通过测量这个相位差,可以得到光纤陀螺所受到的转动角速度。
具体而言,光纤陀螺通过分析光信号的相位差,并利用相关的计算算法,将相位差转换为角速度的测量结果。
在光纤陀螺中,有两种光纤的布局方式,分别是光纤环路和光纤两芯。
光纤环路是将光纤以一个环状的方式布置在装置中,用来增强相位差的检测。
光纤两芯则是采用两根光纤互相配对,通过相对传输速度的差异来测量角速度的变化。
光纤陀螺作为高精度的角速度测量装置,广泛应用于惯性导航、航空航天、汽车导航、地震监测等领域。
它具有响应速度快、精度高、抗干扰性强等特点,并且不需要接触物体,可以在复杂环境下进行准确的测量。
光纤陀螺原理
光纤陀螺是一种利用光纤作为传感器的陀螺仪,它利用光的干涉原理来测量角
速度,是一种高精度、高灵敏度的惯性导航仪器。
其原理基于光纤在旋转时会受到Sagnac效应的影响,从而实现了角速度的测量。
光纤陀螺的工作原理主要包括光路、干涉和信号处理三个方面。
首先,光纤陀
螺的光路是由光源、分束器、光纤环、合束器和探测器组成的。
光源发出的光经过分束器分为两路,一路顺时针流过光纤环,另一路逆时针流过光纤环,然后再通过合束器汇聚到探测器上。
当光纤环处于静止状态时,两路光程相等,合束器上的光信号干涉消光。
而当光纤环发生旋转时,由于Sagnac效应的存在,两路光程会产
生微小的差异,导致合束器上的光信号发生干涉,从而产生干涉信号。
其次,干涉信号的处理是光纤陀螺中至关重要的一环。
探测器接收到干涉信号后,会将其转换为电信号,并经过放大、滤波、数字化等处理,最终输出为角速度信号。
这些信号经过一系列的计算和处理后,可以准确地反映出光纤陀螺所受到的旋转角速度。
最后,光纤陀螺的原理还涉及到光的干涉现象。
当两路光程差为波长的整数倍时,两路光信号将完全相消,形成干涉消光;而当光程差为波长的奇数倍时,两路光信号将完全相长,形成干涉增光。
通过探测器对干涉信号的检测,可以准确地测量出光纤陀螺所受到的角速度。
总的来说,光纤陀螺利用了光的干涉原理,通过测量光纤环中光路的微小差异,实现了对角速度的高精度测量。
其原理简单而又精密,使得光纤陀螺在导航、航天、地震监测等领域有着广泛的应用前景。
随着科技的不断进步,相信光纤陀螺在未来会有更加广阔的发展空间。
光纤陀螺的原理及应用1. 引言光纤陀螺(Fiber Optic Gyroscope,简称FOG)是一种利用光学原理测量旋转的装置。
它通过光的干涉效应来感知旋转角速度,广泛应用于导航、航天、船舶、航空等领域。
本文将介绍光纤陀螺的工作原理和应用。
2. 光纤陀螺的工作原理光纤陀螺的工作原理基于Sagnac效应。
当光沿着一个闭合环路传播时,如果环路在一个平面内以某一速度旋转,光将会沿着环路两个方向分别传播一段距离,而在环路中会产生两束具有不同光程差的光。
当这两束光重新相遇时,它们会发生干涉。
根据Sagnac效应,干涉产生的结果与旋转角速度成正比。
通过测量干涉信号的相移,可以获得旋转角速度的信息。
3. 光纤陀螺的结构光纤陀螺一般由光纤环路、光源、探测器和信号处理器等部分组成。
光纤环路是光纤陀螺中最核心的部分,通常采用一个闭合的环路,光纤被环绕在其中。
环路一般通过一定的结构和材料来保持其稳定性和刚度。
光源发出一束光,经过分光器分成两束光,分别经过光纤环路的两个不同方向传播。
这里的光源一般采用激光器,因为激光的光线干涉效应最为显著。
探测器接收到光纤环路中两束光重新相遇后产生的干涉信号,并将其转化为电信号。
信号处理器对探测器接收到的电信号进行放大、滤波和数字化处理,然后通过算法获取旋转角速度的信息。
4. 光纤陀螺的优势相比传统的机械陀螺,光纤陀螺具有以下优势:•高精度: 光纤陀螺可以实现更高的精度,达到0.01度/小时甚至更高的级别。
•高灵敏度: 光纤陀螺可以感知更小的旋转角速度,对于微小运动的测量非常有优势。
•快速响应: 光纤陀螺的响应速度非常快,可以在毫秒甚至微秒级别对旋转进行测量。
•高可靠性: 光纤陀螺不需要机械部件,减少了零部件运动带来的磨损和故障风险。
•可扩展性: 光纤陀螺可以通过增加光纤环路的长度来提高精度和灵敏度。
5. 光纤陀螺的应用光纤陀螺在以下领域有广泛的应用:5.1 航天导航光纤陀螺被广泛用于航天器的姿态控制和导航系统。
光纤陀螺的原理及构成
光纤陀螺是一种利用光纤传感器和光学干涉原理测量角速度的仪器。
它的原理基于光波通过光纤的传输和干涉。
光纤陀螺的构成主要包括以下部分:
1. 光源:发出光波的光源,一般采用激光器。
2. 光纤:将光波从光源传输到光学器件中。
3. 光学器件:包括分束器、合束器和反射镜等,用于将光波分成两路,经过不同的光程后再合并起来,以检测出旋转角速度。
4. 光电探测器:检测干涉信号并将信号转换成电信号输出。
5. 控制系统:用于控制光纤陀螺的运转,包括光源的控制、光学器件的调整和信号的处理等。
当光纤陀螺旋转时,由于旋转会改变光波经过光程的长度,因此在两路光波合并时会产生干涉。
通过检测干涉信号的变化,可以测量出旋转角速度。
由于光纤陀螺具有高灵敏度和稳定性,因此在惯性导航、航空航天等领域得到了广泛应用。