机械原理_第四章 平面机构的力分析
- 格式:ppt
- 大小:1.00 MB
- 文档页数:31
第4章平面机构的力分析4.1 复习笔记一、机构力分析的任务、目的和方法1.作用在机械上的力根据力对机械运动影响的不同,可分为两大类。
(1)驱动力①定义驱动机械运动的力称为驱动力。
②特点驱动力与其作用点的速度方向相同或成锐角,其所作的功为正功,称为驱动功或输入功。
(2)阻抗力①定义阻止机械运动的力称为阻抗力。
②特点阻抗力与其作用点的速度方向相反或成钝角,其所作的功为负功,称为阻抗功。
③分类a.有效阻抗力机械在生产过程中为了改变工作物的外形、位置或状态而受到的阻力,即工作阻力。
克服这类阻力所完成的功称为有效功或输出功。
b.有害阻抗力机械在运转过程中所受到的非生产阻力。
克服这类阻力所作的功称为损失功。
2.机构力分析的任务和目的(1)确定运动副中的反力运动副反力是指运动副两元素接触处彼此作用的正压力和摩擦力的合力。
(2)确定机械上的平衡力或平衡力偶平衡力是指机械在已知外力的作用下,为了使该机构能按给定的运动规律运动,必须加于机械上的未知外力。
3.机构力分析的方法对于不同的研究对象,适用的方法不同。
(1)低速机械惯性力可以忽略不计,只需要对机械作静力分析。
(2)高速及重型机械①惯性力不可以忽略,需对机械作动态静力分析。
②设计新机械时,由于各构件尺寸、材料、质量及转动惯量未知,因此其动态静力分析方法如下:a.对机构作静力分析及静强度计算,初步确定各构件尺寸;b.对机构进行动态静力分析及强度计算,并据此对各构件尺寸作必要修正;c.重复上述分析及计算过程,直到获得可以接受的设计为止。
二、构件惯性力的确定构件惯性力的确定有一般力学法和质量代换法。
1.一般力学方法如图4-1-1(a)所示为曲柄滑块机构,借此说明不同运动形式构件所产生的惯性力。
(1)作平面复合运动的构件惯性力系有两种简化方式。
①简化为一个加在质心S i上的惯性力F I2和一个惯性力偶矩M I2,即F I2=-m2a S2,M I2=-J S2α2②简化为一个大小等于F I2,而作用线偏离质心S2一定距离l h2的总惯性力F I2′,而l h2=M I2/F I2F′I2对质心S2之矩的方向应与α2的方向相反。
第3章平面机构的运动分析第4章平面机构的力分析第5章机械的效率和自锁第8章平面连杆机构及其设计一、填空题:α=,则传动角γ=___________度,传动角越大,1、铰链四杆机构的压力角040传动效率越___________。
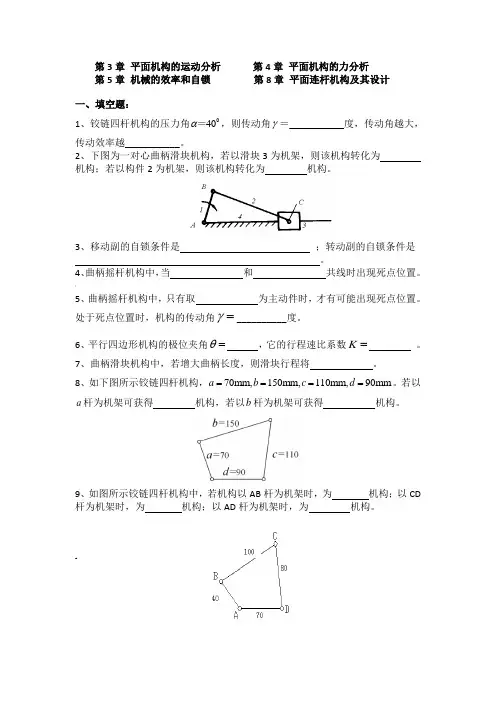
2、下图为一对心曲柄滑块机构,若以滑块3为机架,则该机构转化为机构;若以构件2为机架,则该机构转化为机构。
3、移动副的自锁条件是;转动副的自锁条件是。
4、曲柄摇杆机构中,当和共线时出现死点位置。
:5、曲柄摇杆机构中,只有取为主动件时,才有可能出现死点位置。
处于死点位置时,机构的传动角γ=__________度。
6、平行四边形机构的极位夹角θ=,它的行程速比系数K=。
7、曲柄滑块机构中,若增大曲柄长度,则滑块行程将。
8、如下图所示铰链四杆机构,70mm,150mm,110mm,90mm====。
若以a b c da杆为机架可获得机构,若以b杆为机架可获得机构。
9、如图所示铰链四杆机构中,若机构以AB杆为机架时,为机构;以CD 杆为机架时,为机构;以AD杆为机架时,为机构。
~10、在平面四杆机构中,和为反映机构传力性能的重要指标。
11、在曲柄摇杆机构中,如果将杆作为机架,则与机架相连的两杆都可以作运动,即得到双曲柄机构。
12、在摆动导杆机构中,若以曲柄为原动件,该机构的压力角为,其传动角为。
13、相对瞬心与绝对瞬心的相同点是,不同点是;在由N个构件组成的机构中,有个相对瞬心,有个绝对瞬心。
/二、判断题:1、对于铰链四杆机构,当机构运动时,传动角是不变的。
()2、在四杆机构中,若有曲柄存在,则曲柄必为最短杆。
()3、平面四杆机构的行程速度变化系数K 1,且K值越大,从动件急回越明显。
()4、曲柄摇杆机构中,若以摇杆为原动件,则当摇杆与连杆共线时,机构处于死点位置。
()5、曲柄的极位夹角θ越大,机构的急回特性也越显著。
()6、在实际生产中,机构的“死点”位置对工作都是不利的,处处都要考虑克服。

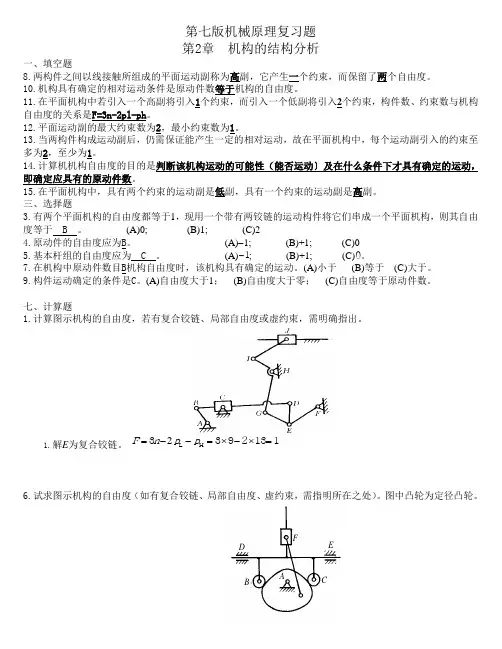
第七版机械原理复习题 第2章 机构的结构分析一、填空题8.两构件之间以线接触所组成的平面运动副称为高副,它产生一个约束,而保留了两个自由度。
10.机构具有确定的相对运动条件是原动件数等于机构的自由度。
11.在平面机构中若引入一个高副将引入1个约束,而引入一个低副将引入2个约束,构件数、约束数与机构自由度的关系是F=3n-2pl-ph 。
12.平面运动副的最大约束数为2,最小约束数为1。
13.当两构件构成运动副后,仍需保证能产生一定的相对运动,故在平面机构中,每个运动副引入的约束至多为2,至少为1。
14.计算机机构自由度的目的是判断该机构运动的可能性(能否运动〕及在什么条件下才具有确定的运动,即确定应具有的原动件数。
15.在平面机构中,具有两个约束的运动副是低副,具有一个约束的运动副是高副。
三、选择题3.有两个平面机构的自由度都等于1,现用一个带有两铰链的运动构件将它们串成一个平面机构,则其自由度等于 B 。
(A)0; (B)1; (C)24.原动件的自由度应为B 。
(A)-1; (B)+1; (C)05.基本杆组的自由度应为 C 。
(A)-1; (B)+1; (C)0。
7.在机构中原动件数目B 机构自由度时,该机构具有确定的运动。
(A)小于 (B)等于 (C)大于。
9.构件运动确定的条件是C 。
(A)自由度大于1; (B)自由度大于零; (C)自由度等于原动件数。
七、计算题1.计算图示机构的自由度,若有复合铰链、局部自由度或虚约束,需明确指出。
1.解E 为复合铰链。
F n p p =--=⨯-⨯=33921312L H6.试求图示机构的自由度(如有复合铰链、局部自由度、虚约束,需指明所在之处)。
图中凸轮为定径凸轮。
ABCDEF虚约束在滚子和E 处,应去掉滚子C 和E ,局部自由度在滚子B 处。
n =4,p L =5,p H =1,F =⨯-⨯-=342511 7.试求图示机构的自由度。

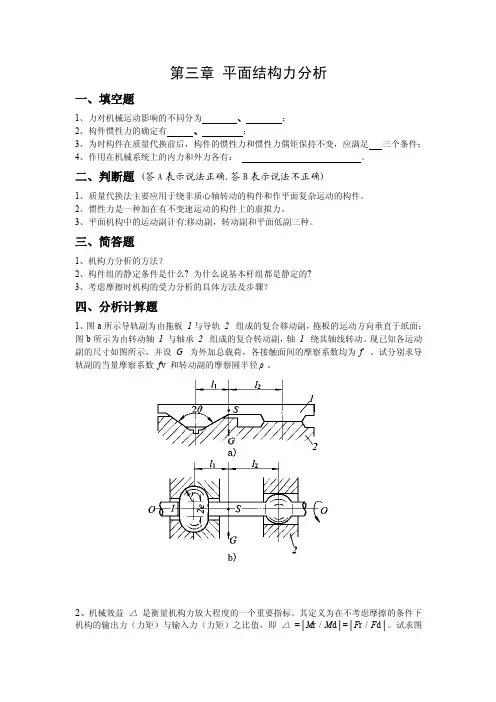
第三章平面结构力分析一、填空题1、力对机械运动影响的不同分为、;2、构件惯性力的确定有、;3、为时构件在质量代换前后,构件的惯性力和惯性力偶矩保持不变,应满足三个条件;4、作用在机械系统上的内力和外力各有:。
二、判断题(答A表示说法正确.答B表示说法不正确)1、质量代换法主要应用于绕非质心轴转动的构件和作平面复杂运动的构件。
2、惯性力是一种加在有不变速运动的构件上的虚拟力。
3、平面机构中的运动副计有:移动副,转动副和平面低副三种。
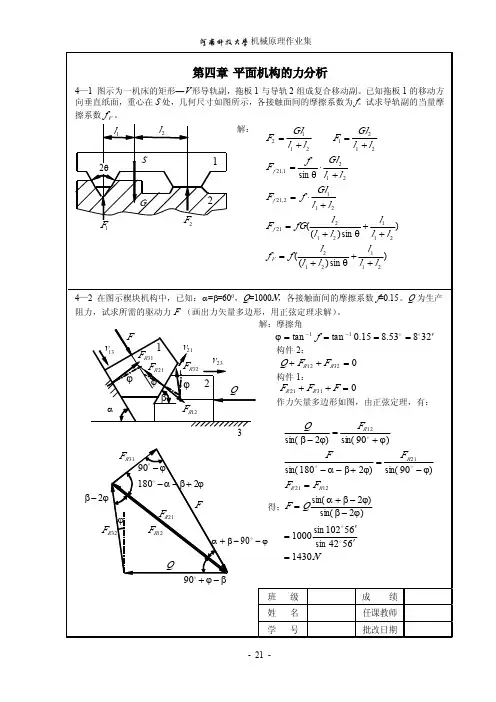
三、简答题1、机构力分析的方法?2、构件组的静定条件是什么? 为什么说基本杆组都是静定的?3、考虑摩擦时机构的受力分析的具体方法及步骤?四、分析计算题1、图a所示导轨副为由拖板 1 与导轨2组成的复合移动副,拖板的运动方向垂直于纸面;图b所示为由转动轴1与轴承2组成的复合转动副,轴1绕其轴线转动。
现已知各运动副的尺寸如图所示,并设G 为外加总载荷,各接触面间的摩察系数均为f。
试分别求导轨副的当量摩察系数f v 和转动副的摩察圆半径ρ。
2、机械效益△是衡量机构力放大程度的一个重要指标。
其定义为在不考虑摩擦的条件下机构的输出力(力矩)与输入力(力矩)之比值,即△=│M r / M d│=│F r / F d│。
试求图示机构的机械效益。
(图示为一小型压力机)第三章平面结构力分析习题解答一、填空题1、驱动力;2、一般力学方法、质量代换法3、代换前后构件重力,惯性力、驱动力,阻力,运动副反力;4、的质量不变、代换前后构件的质心位置不变、代换前后构件对质心轴的转动惯量不变;二、判断题(答A表示说法正确.答B表示说法不正确)1、( A );2、(B);3、(B)三、简答题1、机械力分析的方法有如下两类:(1)作静力分析即不计构件惯性力的机构力分析对于低速机械,因其惯性力小,故常略去不计。
此时只需对机械作静力分析。
(2)作动态静力分析即将惯性力视为一般外力加于相应构件上,再按静力分析的方法进行分析。
机械原理知识点归纳总结范文第一章绪论基本概念:机器、机构、机械、零件、构件、机架、原动件和从动件。
第二章平面机构的结构分析机构运动简图的绘制、运动链成为机构的条件和机构的组成原理是本章学习的重点。
1.机构运动简图的绘制机构运动简图的绘制是本章的重点,也是一个难点。
为保证机构运动简图与实际机械有完全相同的结构和运动特性,对绘制好的简图需进一步检查与核对(运动副的性质和数目来检查)。
2.运动链成为机构的条件判断所设计的运动链能否成为机构,是本章的重点。
运动链成为机构的条件是:原动件数目等于运动链的自由度数目。
机构自由度的计算错误会导致对机构运动的可能性和确定性的错误判断,从而影响机械设计工作的正常进行。
机构自由度计算是本章学习的重点。
准确识别复合铰链、局部自由度和虚约束,并做出正确处理。
(1)复合铰链复合铰链是指两个以上的构件在同一处以转动副相联接时组成的运动副。
正确处理方法:k个在同一处形成复合铰链的构件,其转动副的数目应为(k-1)个。
(2)局部自由度局部自由度是机构中某些构件所具有的并不影响其他构件的运动的自由度。
局部自由度常发生在为减小高副磨损而增加的滚子处。
正确处理方法:从机构自由度计算公式中将局部自由度减去,也可以将滚子及与滚子相连的构件固结为一体,预先将滚子除去不计,然后再利用公式计算自由度。
(3)虚约束虚约束是机构中所存在的不产生实际约束效果的重复约束。
正确处理方法:计算自由度时,首先将引入虚约束的构件及其运动副除去不计,然后用自由度公式进行计算。
虚约束都是在一定的几何条件下出现的,这些几何条件有些是暗含的,有些则是明确给定的。
对于暗含的几何条件,需通过直观判断来识别虚约束;对于明确给定的几何条件,则需通过严格的几何证明才能识别。
3.机构的组成原理与结构分析机构的组成过程和机构的结构分析过程正好相反,前者是研究如何将若干个自由度为零的基本杆组依次联接到原动件和机架上,以组成新的机构,它为设计者进行机构创新设计提供了一条途径;后者是研究如何将现有机构依次拆成基本杆组、原动件及机架,以便对机构进行结构分类。
第二章平面机构的结构分析题2-1 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-1a) 2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-1b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-1c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-1d)。
11(c)题2-1(d)54364(a)5325215436426(b)321讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-2 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。