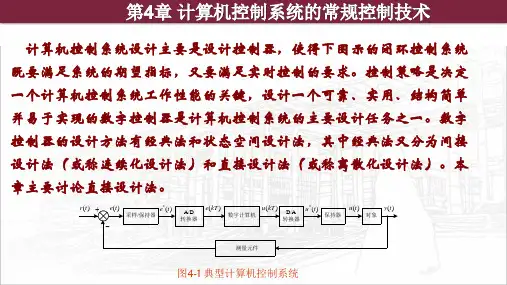
计算机控制系统的状态空间设计.ppt
- 格式:ppt
- 大小:713.00 KB
- 文档页数:32
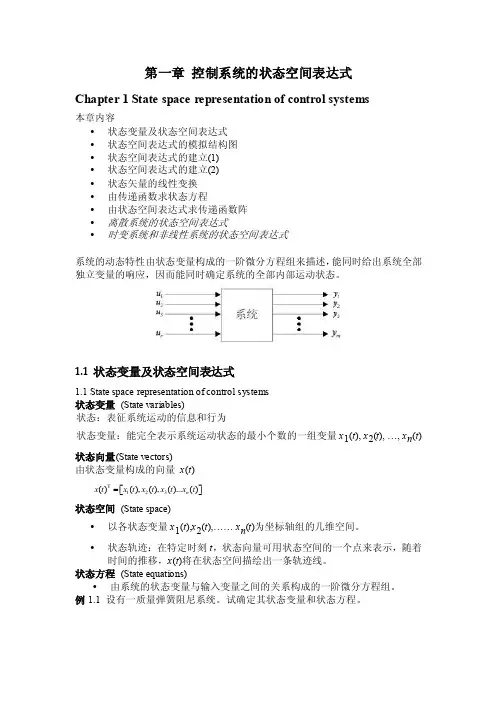
第一章 控制系统的状态空间表达式Chapter 1 State space representation of control systems本章内容• 状态变量及状态空间表达式 • 状态空间表达式的模拟结构图 • 状态空间表达式的建立(1) • 状态空间表达式的建立(2) • 状态矢量的线性变换 • 由传递函数求状态方程• 由状态空间表达式求传递函数阵 • 离散系统的状态空间表达式• 时变系统和非线性系统的状态空间表达式系统的动态特性由状态变量构成的一阶微分方程组来描述,能同时给出系统全部独立变量的响应,因而能同时确定系统的全部内部运动状态。
1.1 状态变量及状态空间表达式1.1 State space representation of control systems 状态变量 (State variables)状态:表征系统运动的信息和行为状态变量:能完全表示系统运动状态的最小个数的一组变量x 1(t ), x 2(t ), …, x n (t ) 状态向量(State vectors)由状态变量构成的向量 x (t )T 123()(),(),()...()n x t x t x t x t x t =⎡⎤⎣⎦状态空间 (State space) • 以各状态变量x 1(t ),x 2(t ),…… x n (t )为坐标轴组的几维空间。
•状态轨迹:在特定时刻t ,状态向量可用状态空间的一个点来表示,随着时间的推移,x (t )将在状态空间描绘出一条轨迹线。
状态方程 (State equations)• 由系统的状态变量与输入变量之间的关系构成的一阶微分方程组。
例1.1 设有一质量弹簧阻尼系统。
试确定其状态变量和状态方程。
解:系统动态方程2()().()().()()()d yF t ky t f yt m dt my t f yt ky t F t ⎧--=⎪⎨⎪++=⎩ 设1()()y t x t =,2()()yt x t = 12()()............................................(1)1()()()()........(2)x t y t f k x t y t y t F t m m m =⎧⎪⎨=--+⎪⎩12212()()1()()()()xt x t k f x t x t x t F t m m m =⎧⎪⎨=--+⎪⎩1122010()()()1()()xt x t F t f k x t x t m m m ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥+⎢⎥⎢⎥--⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦ = 状态方程的标准形式:()()()xt Ax t Bu t =+ (A :系统矩阵 B :输入矩阵) 输出方程 (O u t p u t e q u a t i o n )系统的输出量与状态变量之间的关系[]112()()()10 ()x t y t x t x t ⎡⎤==⎢⎥⎣⎦()()y t Cx t =(C:输出矩阵)状态方程和输出方程的总和即称为状态空间表达式。

在MATLAB中使用状态空间模型进行设计MATLAB是一种功能强大的计算机工具,可以用于各种科学计算、数据可视化和算法开发等任务。
在控制系统设计中,MATLAB也是一个重要的工具,可以用来建立和分析控制系统模型。
其中,状态空间模型是一种常用的表示方法,可以描述系统的动态行为和状态变化。
状态空间模型是一种数学模型,用一组微分方程描述系统的动态行为。
它通过将系统内部的状态变量以及输入和输出变量进行关联,来描述系统的演化过程。
状态空间模型可以用矩阵形式表示,这种表示方法直观而且方便进行计算。
在MATLAB中,可以使用StateSpace类来构建状态空间模型。
StateSpace类可以接受系统的系数矩阵作为输入,然后根据这些系数矩阵构建一个状态空间模型对象。
这个对象可以用来进行模型分析、设计和模拟等操作。
下面我们将介绍一些常用的MATLAB函数和命令,帮助读者了解如何在MATLAB中使用状态空间模型进行设计。
首先,我们可以使用`ss`函数来创建一个状态空间模型对象。
这个函数可以接受系统的系数矩阵作为输入,然后返回一个StateSpace对象。
例如,我们可以使用如下命令创建一个二阶系统的状态空间模型:```matlabA = [0 1; -1 -1];B = [0; 1];C = [1 0];D = 0;sys = ss(A, B, C, D);```在上述代码中,矩阵A、B、C和D分别表示系统的状态方程、输入矩阵、输出矩阵和直接传递矩阵。
通过使用`ss`函数,我们可以将这些矩阵传递给StateSpace对象,并得到一个表示系统的状态空间模型对象sys。
接下来,我们可以使用MATLAB提供的函数和方法来对状态空间模型进行各种操作。
例如,我们可以使用`tf`函数将状态空间模型转换为传输函数模型。
传输函数模型是一种常用的控制系统表示方法,可以用来分析系统的频率响应和稳定性等特性。
下面是一个将状态空间模型转换为传输函数模型的示例代码:```matlabtf_sys = tf(sys);```在上述代码中,我们使用`tf`函数将状态空间模型sys转换为传输函数模型tf_sys。