控制系统的状态空间分析与综合
- 格式:doc
- 大小:633.00 KB
- 文档页数:18
控制系统的状态空间分析与设计控制系统的状态空间分析与设计是现代控制理论的重要内容之一,它提供了一种描述和分析控制系统动态行为的数学模型。
状态空间方法是一种广泛应用于系统建模和控制设计的理论工具,其基本思想是通过描述系统内部状态的变化来揭示系统的特性。
一、状态空间模型的基本概念状态空间模型描述了系统在不同时间点的状态,包括系统的状态变量和输入输出关系。
在控制系统中,状态变量是指影响系统行为的内部变量,如电压、速度、位置等。
通过状态空间模型,可以将系统行为转化为线性代数方程组,从而进行分析和设计。
1. 状态方程控制系统的状态方程是描述系统状态演化的数学表达式。
一般形式的状态方程可以表示为:x(t) = Ax(t-1) + Bu(t)y(t) = Cx(t) + Du(t)其中,x(t)是系统在时刻t的状态向量,A是系统的状态转移矩阵,B是控制输入矩阵,u(t)是系统的控制输入,y(t)是系统的输出,C是输出矩阵,D是直接传递矩阵。
2. 状态空间矩阵状态空间矩阵包括系统的状态转移矩阵A、控制输入矩阵B、输出矩阵C和直接传递矩阵D。
通过这些矩阵,可以准确描述系统的状态变化与输入输出之间的关系。
3. 系统的可控性和可观性在状态空间分析中,可控性和可观性是评估系统控制性能和观测性能的重要指标。
可控性是指通过调节控制输入u(t),系统的状态可以在有限时间内从任意初始状态x(0)到达任意预期状态x(t)。
可控性可以通过系统的状态转移矩阵A和控制输入矩阵B来判定。
可观性是指通过系统的输出y(t)可以完全确定系统的状态。
可观性可以通过系统的状态转移矩阵A和输出矩阵C来判定。
二、状态空间分析方法状态空间分析方法包括了系统响应分析、系统稳定性分析和系统性能指标分析。
1. 系统响应分析系统的响应分析可以通过状态方程进行。
主要分析包括零输入响应和零状态响应。
零输入响应是指当控制输入u(t)为零时,系统的输出y(t)变化情况。
1 前言1.1 状态空间法的研究意义经典线性系统理论对于单输入-单输出线性定常系统的分析和综合是比较有效地,但其显著的缺点是只能揭示输入-输出间的外部特征,难以揭示系统内部的结构特性,也难以有效处理多输入-多输出系统。
在20世纪50年代蓬勃兴起的航天技术的推动下,1960年前后开始了从经典控制理论到现代控制理论的过渡,其中以个重要标志就是卡尔曼系统地将状态空间概念引入到控制理论中来。
现代控制理论正是在引入状态和状态空间概念的基础上发展起来的。
现代控制理论中的线性系统理论运用状态空间法描述输入-状态-输出诸变量间的因果关系,不但反映了系统的输入-输出外部特征,而且揭示了系统内部的结构特征,是一种既适用于单输入-单输出系统又适用于多输入-多输出系统,既可用于线性定常系统又可以用于线性时变系统的有效分析和综合方法。
在线性系统理论中,根据所采用的数学工具及系统描述方法,又出现了一些平行的分支,目前主要有线性系统的状态空间法、线性系统的几何理论、线性系统的代数理论、线性系统的多变量频域方法等。
由于状态空间法是线性系统理论中最重要和影响最广的分支,所以研究控制系统的状态空间分析及设计是非常有必要的。
1.2 状态空间法的国内外研究状况1940年到1950年,以频域方法为基础建立了古典控制理论,其特征是传递函数作为描述“受控对象”动态过程的数学模型,进行系统分析与综合;适用范围仅限于线性、定常(是不变)、确定性的、集中参数的单变量(单输入、单输出、简称SISO)系统;能解决的问题是以系统稳定性为核心的动态品质。
1950年代兴起的航天技术为代表的更加复杂的控制对象是一个多变量系统(多输入多输出、简称MIMO),有的控制对象具有非线性和时变特性,甚至具有不确定的、分布参数特性等。
在控制目标上,希望能解决在某种目标函数意义下的最优化问题。
1950年到1960年代不少科学家为此作出了杰出贡献,其中应特别提到的是庞特里亚金的“极值理论”,贝尔曼的“动态规划”,卡尔曼的“滤波”、“能控性和能观性”理论等。
现代控制理论是在20世纪50年代中期迅速兴起的空间技术的推动下发展起来的。
空间技术的发展迫切要求建立新的控制原理,以解决诸如把宇宙火箭和人造卫星用最少燃料或最短时间准确地发射到预定轨道一类的控制问题。
这类控制问题十分复杂,采用经典控制理论难以解决。
1958年,苏联科学家Л.С.庞特里亚金提出了名为极大值原理的综合控制系统的新方法。
在这之前,美国学者R.贝尔曼于1954年创立了动态规划,并在1956年应用于控制过程。
他们的研究成果解决了空间技术中出现的复杂控制问题,并开拓了控制理论中最优控制理论这一新的领域。
1960~1961年,美国学者R.E.卡尔曼和R.S.布什建立了卡尔曼-布什滤波理论,因而有可能有效地考虑控制问题中所存在的随机噪声的影响,把控制理论的研究范围扩大,包括了更为复杂的控制问题。
几乎在同一时期内,贝尔曼、卡尔曼等人把状态空间法系统地引入控制理论中。
状态空间法对揭示和认识控制系统的许多重要特性具有关键的作用。
其中能控性和能观测性尤为重要,成为控制理论两个最基本的概念。
到60年代初,一套以状态空间法、极大值原理、动态规划、卡尔曼-布什滤波为基础的分析和设计控制系统的新的原理和方法已经确立,这标志着现代控制理论的形成。
学科内容现代控制理论所包含的学科内容十分广泛,主要的方面有:线性系统理论、非线性系统理论、最优控制理论、随机控制理论和适应控制理论。
线性系统理论它是现代控制理论中最为基本和比较成熟的一个分支,着重于研究线性系统中状态的控制和观测问题,其基本的分析和综合方法是状态空间法。
按所采用的数学工具,线性系统理论通常分成为三个学派:基于几何概念和方法的几何理论,代表人物是W.M.旺纳姆;基于抽象代数方法的代数理论,代表人物是R.E.卡尔曼;基于复变量方法的频域理论,代表人物是H.H.罗森布罗克。
非线性系统理论非线性系统的分析和综合理论尚不完善。
研究领域主要还限于系统的运动稳定性、双线性系统的控制和观测问题、非线性反馈问题等。

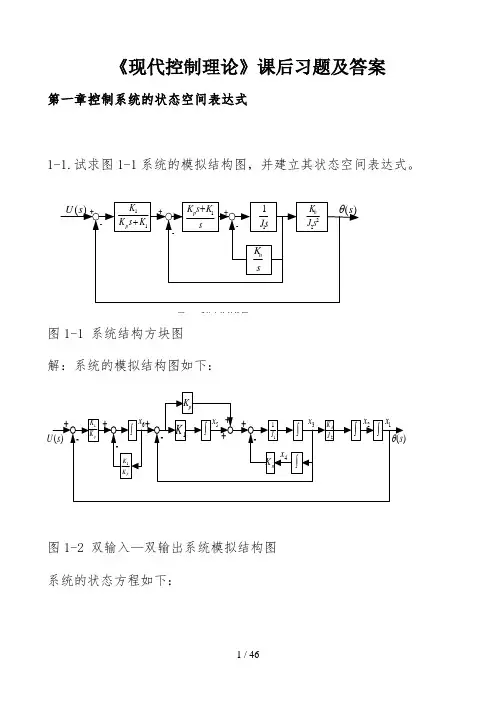
《现代控制理论》课后习题及答案第一章控制系统的状态空间表达式1-1.试求图1-1系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图图1-1 系统结构方块图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图图1-2 双输入—双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••6543211654321111111126543210000010000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2.有电路如图1-3所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图图1-3 电路图解:由图,令32211,,x u x i x i c===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
线性系统的状态空间分析与综合第九章线性系统的状态空间分析与综合⼀、教学⽬的与要求:通过本章内容的学习,使学⽣建⽴起状态变量和状态空间的概念,掌握线性定常系统状态空间模型的建⽴⽅法,状态空间表达式的线性变换,状态完全能控或状态完全能观测的定义,及其多种判据⽅法,状态转移矩阵的求法,传递函数矩阵与状态空间表达式的关系。
⼆、授课主要内容:1.线性系统的状态空间描述2.线性系统的可控性与可观测性3.线性定常系统的状态反馈与状态观测器(详细内容见讲稿)三、重点、难点及对学⽣的要求(掌握、熟悉、了解、⾃学)1.重点掌握线性定常系统状态空间模型的建⽴⽅法与其他数学描述(微分⽅程、传递函数矩阵)之间的关系。
2.掌握采⽤状态空间表述的系统运动分析⽅法,状态转移矩阵的概念和求解。
3.掌握系统基本性质——能控性和能观测性的定义、有关判据及两种性质之间的对偶性。
4.理解状态空间表达式在线性变换下的性质,对于完全能控或能观测系统,构造能控、能观测标准形的线性变换⽅法,对于不完全能控或不完全能观测系统,基于能控性或能观测性的结构分解⽅法。
5.掌握单变量系统的状态反馈极点配置和全维状态观测器设计⽅法,理解分离定理,带状态观测器的状态反馈控制系统的设计。
重点掌握线性系统的状态空间描述和求解,线性系统的可控性与可观测性及状态反馈与状态观测器。
四、主要外语词汇线性系统 linear system状态空间 state space状态⽅程 state equation状态向量 state vector传递函数矩阵 translation function matrix状态转换矩阵 state-transition matrix可观测标准形 observational standard model可控标准形 manipulative standard model李亚普诺夫⽅程Lyaponov equation状态观测器 state observation machine对偶原理 principle of duality五、辅助教学情况(见课件)六、复习思考题1.什么是系统的状态空间模型?状态空间模型中的状态变量、输⼊变量、输出变量各指什么?2.通过机理分析法建⽴系统状态空间模型的主要步骤有哪些?3.何为多变量系统?如何⽤传递矩阵来描述多变量系统的动态特性?在多变量系统中,环节串联、并联、反馈连接时,如何求取总的传递矩阵?4.试简述数学模型各种表达式之间的对应关系。
第8章控制系统的状态空间分析与综合第1~7章涉及的内容属于经典控制理论的范畴,系统的数学模型是线性定常微分方程和传递函数,主要的分析与综合方法是时域法、根轨迹法和频域法。
经典控制理论通常用于单输入-单输出线性定常系统,其缺点是只能反映输入-输出间的外部特性,难以揭示系统内部的结构和运行状态,不能有效处理多输入-多输出系统、非线性系统、时变系统等复杂系统的控制问题。
随着科学技术的发展,对控制系统速度、精度、适应能力的要求越来越高,经典控制理论已不能满足要求。
1960年前后,在航天技术和计算机技术的推动下,现代控制理论开始发展,一个重要的标志就是美国学者卡尔曼引入了状态空间的概念。
它是以系统内部状态为基础进行分析与综合的控制理论,两个重要的内容如下。
(1)最优控制:在给定的限制条件和评价函数下,寻求使系统性能指标最优的控制规律。
(2)最优估计与滤波:在有随机干扰的情况下,根据测量数据对系统的状态进行最优估计。
本章讨论控制系统的状态空间分析与综合,它是现代控制理论的基础。
8.1 控制系统的状态空间描述8.1.1 系统数学描述的两种基本方法统的内部结构和内部变量,如传递函数;另一种是状态空间描述(内部描述),它是基于系统内部结构的一种数学模型,由两个方程组成。
一个反映系统内部变量x和输入变量u间的关系,具有一阶微分方程组或一阶差分方程组的形式;另一个是表征系统输出向量y与内部变量及输入变量间的关系,具有代数方程的形式。
外部描述虽能反映系统的外部特性,却不能反映系统内部的结构与运行过程,内部结构不同的两个系统也可能具有相同的外部特性,因此外部描述通常是不完整的;内部描述则能全面完整地反映出系统的动力学特征。
8.1.2 状态空间描述常用的基本概念 1.输入和输出由外部施加到系统上的激励称为输入,若输入是按需要人为施加的,又称为控制;系统的被控量或从外部测量到的系统信息称为输出,若输出是由传感器测量得到的,又称为观测。
2.状态、状态变量和状态向量能完整描述和惟一确定系统时域行为或运行过程的一组独立(数目最小)的变量称为系统的状态,其中的各个变量称为状态变量。
当状态表示成以各状态变量为分量组成的向量时,称为状态向量。
系统的状态)(t x 由0t t =时的初始状态x (0t ) 及0t t ≥的输入)(t u 惟一确定。
对n 阶微分方程描述的系统,当n 个初始条件)(,),(),(0)1(00t x t xt x n -Λ&及0t t ≥的输入)(t u 给定时,可惟一确定方程的解,故)1(,,,-n x xx Λ&这n 个独立变量可选作状态变量。
状态对于确定系统的行为既是必要的,也是充分的。
n 阶系统状态变量所含独立变量的个数为n ,当变量个数小于n 时,便不能完全确定系统的状态,而当变量个数大于n 时,则存在多余的变量,这些多余的变量就不是独立变量。
判断变量是否独立的基本方法是看它们之间是否存在代数约束。
状态变量的选取并不惟一,一个系统通常有多种不同的选取方法。
但应尽量选取能测量的物理量或独立贮能元件的贮能变量作为状态变量,以便实现系统设计。
在机械系统中,常选取位移和速度作为变量;在R-L-C 网络中,常选电感电流和电容电压作为状态变量;在由传递函数绘制的方块图中,常取积分器的输出作为状态变量。
3.状态空间以状态向量的n 个分量作为坐标轴所组成的n 维空间称为状态空间。
4.状态轨迹系统在某个时刻的状态,可以看作是状态空间的一个点。
随着时间的推移,系统状态不断变化,便在状态空间中描绘出一条轨迹,该轨迹称为状态轨迹。
5.状态方程描述系统状态变量与输入变量之间关系的一阶向量微分方程或差分方程称为系统的状态方程,它不含输入的微积分项。
状态方程表征了系统由输入所引起的状态变化,一般情况下,状态方程既是非线性的,又是时变的,它可以表示为[]t t u t x f t x),(),()(=& (8-1) 6.输出方程描述系统输出变量与系统状态变量和输入变量之间函数关系的代数方程称为输出方程,当输出由传感器得到时,又称为观测方程。
输出方程的一般形式为[]t t u t x g t y ),(),()(= (8-2) 输出方程表征了系统状态和输入的变化所引起的系统输出变化。
7.动态方程状态方程与输出方程的组合称为动态方程,又称为状态空间表达式,其一般形式为[][]⎭⎬⎫==t t u t x g t y t t u t x f t x ),(),()(),(),()(& (8-3a )或离散形式[][]⎭⎬⎫==+k k k k k k k k t t u t x g t y t t u t x f t x ),(),()(),(),()(1 (8-3b )8.线性系统:线性系统的状态方程是一阶向量线性微分方程或差分方程,输出方程是向量代数方程。
线性连续时间系统动态方程的一般形式为⎭⎬⎫+=+=D(t)u(t)C(t)x(t)y(t))()()()()(t u t B t x t A t x & (8-4)设状态x 、输入u 、输出y 的维数分别为q p,n,,称n n ⨯矩阵A (t)为系统矩阵或状态矩阵,称p n ⨯矩阵()B t 为控制矩阵或输入矩阵,称n q ⨯矩阵C (t )为输出矩阵或观测矩阵,称p q ⨯矩阵D (t )为前馈矩阵或输入输出矩阵。
9.线性定常系统线性系统的A ,B ,C ,D 中的各元素全部是常数。
即⎭⎬⎫+=+=)t (Du )t (Cx )t (y )t (Bu )t (Ax )t (x & (8-5a )对应的离散形式为)()()()()()1(k Du k Cx k y k Hu k Gx k x +=+=+ (8-5b )为书写方便,常把系统(8-5a)和系统(8-5b)分别简记为S(A,B,C,D)和S(G,H,C,D)。
10.线性系统的结构图线性系统的动态方程常用结构图表示。
图8-3为连续系统的结构图;图8-4为离散系统n )单位矩阵,s是拉普拉斯算子,z为单位延时算子。
的结构图。
图中,I为(n图8-3线性连续时间系统结构图图8-4 线性离散时间系统结构图由于状态变量的选取不是惟一的,因此状态方程、输出方程、动态方程也都不是惟一的。
但是,用独立变量所描述的系统的维数应该是惟一的,与状态变量的选取方法无关。
动态方程对于系统的描述是充分的和完整的,即系统中的任何一个变量均可用状态方程和输出方程来描述。
状态方程着眼于系统动态演变过程的描述,反映状态变量间的微积分约束;而输出方程则反映系统中变量之间的静态关系,着眼于建立系统中输出变量与状态变量间的代数约束,这也是非独立变量不能作为状态变量的原因之一。
动态方程描述的优点是便于采用向量、矩阵记号简化数学描述,便于在计算机上求解,便于考虑初始条件,便于了解系统内部状态的变化特征,便于应用现代设计方法实现最优控制和最优估计,适用于时变、非线性、连续、离散、随机、多变量等各类控制系统。
(a)(b)图8-5 电路的独立变量例8-1试确定图8-5中(a)、(b)所示电路的独立状态变量。
图中u、i分别是输入电x,i=1,2,3,为电容器电压或电感器电流。
压和输入电流,y为输出电压,i解并非所有电路中的电容器电压和电感器电流都是独立变量。
对图8-5(a)所示电路,不失一般性,假定电容器初始电压值均为0,有因此,只有一个变量是独立的,状态变量只能选其中一个,即用其中的任意一个变量作为状态变量便可以确定该电路的行为。
实际上,三个串并联的电容可以等效为一个电容。
对图8-5(b)所示电路,x1 = x2,因此两者相关,电路只有两个变量是独立的,即(x1和x 3)或(x 2和x 3),可以任用其中一组变量如(x 2,x 3)作为状态变量。
8.1.3 系统的传递函数矩阵设初始条件为零,对线性定常系统的动态方程进行拉氏变换,可以得到11()()()()[()]()X s sI A BU s Y s C sI A B D U s --=-=-+ (8-6)系统的传递函数矩阵(简称传递矩阵)定义为D B A sI C s G +-=-1)()( (8-7) 例8-2 已知系统动态方程为 试求系统的传递函数矩阵。
解 已知 011010,,,0020101A B C D ⎡⎤⎡⎤⎡⎤====⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦故⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++=⎥⎦⎤⎢⎣⎡+-=---210)2(11201)(11s s s s s s A sI8.1.4 线性定常系统动态方程的建立 1.根据系统物理模型建立动态方程例8-3 试列写如图8-6所示的R-L-C 电路方程,选择几组状态变量并建立相应的动态方程,并就所选状态变量间的关系进行讨论。
图8-6 R-L-C 电路解 有明确物理意义的常用变量主要有:电流、电阻器电压、电容器的电压与电荷、电感器的电压与磁通。
根据回路电压定律 e idt C dt di LRi =++⎰1图8-7 双输入-三输出机械位移系统电路输出量为1y u C ==⎰idt 1) 设状态变量为电感器电流和电容器电压,即i x =1,⎰=idt Cx 12,则状态方程为 输出方程为其向量-矩阵形式为 简记为 ⎩⎨⎧cxy be Ax x=+=&式中,2) 设状态变量为电容器电流和电荷,即12,x i x idt ==⎰,则有3) 设状态变量 1211,x idt Ri x idt C C=+=⎰⎰,其中,1x 无明确意义的物理量,可以推出其向量-矩阵形式为[]⎥⎦⎤⎢⎣⎡=⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎦⎤⎢⎣⎡2121211001111x x y e L R x x RC RC RC L R RC x x &&可见对同一系统,状态变量的选择不具有惟一性,动态方程也不是惟一的。
例8-4 由质量块、弹簧、阻尼器组成的双输入三输出机械位移系统如图8-7所示,具有力F 和阻尼器气缸速度V 两种外作用,输出量为质量块的位移,速度和加速度。
试列写该系统的动态方程。
f k,m,分别为质量、弹簧刚度、阻尼系数;x 为质量块位移。
解 根据牛顿力学可知,系统所受外力F 与惯性力m x&&、阻尼力f (x &-V )和弹簧恢复力kx 构成平衡关系,系统微分方程如下:这是一个二阶系统,若已知质量块的初始位移和初始速度,系统在输入作用下的解便可惟一确定,故选择质量块的位移和速度作为状态变量。
设x x x x &==21,。
由题意知系统有三个输出量,设图8-8 双质量块机械系统x y x x y x x y &&&=====32211,,。