清华大学自动化系导航与控制研究中心
- 格式:doc
- 大小:26.50 KB
- 文档页数:1
清华考博辅导:清华大学自动化学院考博难度解析及经验分享清华大学自动化学院2019 年博士研究生招生实行“申请―审核”制,符合《清华大学2019 年招收攻读博士学位研究生简章》中报考条件的申请人提交相关材料,依据考生申请材料的综合评价结果确定差额综合考核名单,经综合考核后择优推荐拟录取。
强军计划、少数民族骨干计划、论文博士等采取相同的办法同时进行。
一、院系简介自动化系成立于1970年。
为适应国家工业建设和国防建设的需要,清华大学于五十年代即设置了与自动化学科有关的一批专业,包括工业企业电气化与自动化专业(1955年设在电机系)、自动学与远动学专业(1955年设在电机系,1958年6月并入自动控制系改名为自动控制专业)、热能动力装置专业中的热力设备自动化专门化以及后来的热工量测及自动控制专业(1956年设在动力机械系)等。
1970年5月,清华大学将一批有关的专业联合建立起国内第一个自动化系(初期名为工业自动化系),其人员主要来源于电机系和动力机械系两大部分。
参与组建的电机系单位包括工业企业电气化与自动化教研组、电子学教研组(原名工业电子学教研组)、可控硅元件及装置车间、电机系系机关以及少数由其他教研组抽调出来的教师;动力机械系的单位包括热工量测及自动控制教研组的绝大部分教师。
初建系时全系教职工共约200人,其中教授2人,副教授5人,讲师34人,助教43人,还有1970届毕业生87人,此外还包括一部分基础课和政治科教师。
建系当年开始招收工农兵学员,自1970年至1976年,先后招生6届,共1264人。
1979年7月,学校统筹进行专业布局调整,将原来在计算机系(即前自动控制系)从事自动控制理论研究与教学的部分教师并入自动化系,加强自动化学科的理论基础,成立了控制理论教研组。
为适应国家经济建设的发展以及迎接新技术革命的挑战,这一时期自动化系在学科建设和布局上进行了重大的调整和发展。
首先是完成了专业内容的更新,一方面继续巩固和提高在控制工程方面的优势,加强现代控制理论基础和其它新技术的研究;另一方面不失时机的开展信息技术和系统工程学科的教学和科研工作。
基于OpenMV摄像头的运动目标控制与自动追踪系统设计与实现目录一、内容概括 (2)1.1 研究背景 (3)1.2 研究目的与意义 (4)1.3 国内外研究现状及发展动态 (5)二、相关工作与技术基础 (6)2.1 OpenMV摄像头介绍 (8)2.2 目标检测与跟踪算法概述 (9)2.3 控制系统设计基础 (10)三、系统设计与实现 (12)3.1 系统总体架构设计 (13)3.2 图像采集模块设计 (15)3.3 目标检测与跟踪模块设计 (16)3.4 控制模块设计 (18)3.5 执行机构设计与实现 (19)四、实验与测试 (21)4.1 实验环境搭建 (22)4.2 实验方法与步骤 (23)4.3 实验结果与分析 (25)4.4 系统优化与改进 (26)五、总结与展望 (28)5.1 研究成果总结 (29)5.2 存在的不足与局限性 (30)5.3 对未来工作的展望 (32)一、内容概括本文档主要围绕基于OpenMV摄像头的运动目标控制与自动追踪系统的设计与实现展开。
介绍了OpenMV摄像头的基本原理和功能,以及其在运动目标检测与追踪领域的应用前景。
系统阐述了设计思路与方法,包括硬件选型、软件架构设计、运动目标检测算法选择及实现等关键环节。
在硬件选型部分,我们选用了具备较高性能的OpenMV摄像头,并配置了相应的驱动程序,以确保其稳定运行。
在软件架构上,我们采用了分层设计思想,将系统划分为前端图像采集、中端图像处理与目标检测、后端控制与执行三个层次,以实现各模块之间的高效协同。
在运动目标检测方面,我们重点研究了基于OpenCV的运动目标检测算法,通过优化算法参数和提高计算效率,实现了对运动目标的快速准确检测。
我们还探讨了如何利用深度学习技术来进一步提升检测精度和鲁棒性。
在控制与追踪策略方面,我们根据运动目标的速度、方向等特性,设计了相应的PID控制器和模糊控制算法,以实现对摄像头的精确控制和稳定追踪。
控制科学与工程专业介绍“控制科学与工程”学科是一门研究控制的理论、方法、技术及其工程应用的学科。
它是20世纪最重要和发展最快的学科之一,其各阶段的理论发展及技术进步都与生产和社会实际需求密切相关。
《本人》自动化系研究生专业包括本学科下设的七个二级学科:“控制理论与控制工程”、“检测技术与自动装置”、“系统工程”、“模式识别与智能系统”、“导航、制导与控制”、“企业信息化系统与工程”和“生物信息学”。
各二级学科的主要研究范畴及相互联系如下。
控制理论与控制工程以工程领域内的控制系统为主要对象,以数学方法和计算机技术为主要工具,研究各种控制策略及控制系统的建模、分析、综合、优化、设计和实现的理论、方法和技术。
本学科培养从事控制理论与控制工程领域的研究、设计、开发和系统集成等方面的高级专门人才。
本专业方向主要研究线性与非线性控制、自适应控制、变结构控制、鲁棒控制、智能控制、模糊控制、神经元控制、预测控制、推理控制、容错控制、多变量控制、量子控制、系统辨识、过程建模与优化、故障诊断与预报、离散事件动态系统、复杂系统的优化与调度、智能优化与智能维护、复杂性理论研究、高性能调速与伺服、运动体导航与制导、机器人与机器视觉、多传感器集成与融合,多自主体合作与对抗、嵌入式系统、传感器网络、软测量技术、电力电子技术、现场总线技术、系统集成技术、网络控制与流媒体技术,以及将上述技术与方法加以集成的综合自动化技术等。
系统工程是为了解决日益复杂的社会实践问题而形成的从整体出发合理组织、控制和管理各类系统的综合性的工程技术学科。
本学科培养从事系统工程领域的研究、开发、设计等方面工作的高级专门人才。
本专业方向主要研究:非线性系统建模、人工神经网络和复杂系统自组织理论方法的研究和应用,高速公路和城市智能交通系统基础理论、智能技术和集成技术的研究与应用,电子商务系统研究、开发与应用,企业管理信息系统与决策支持系统的研究与开发,宏观社会经济系统综合发展和区域开发规划等。
清华考博辅导:清华大学控制科学与工程考博难度解析及经验分享根据教育部学位与研究生教育发展中心最新公布的第四轮学科评估结果可知,全国共有115所开设计控制科学与工程专业的大学参与了2018-2019控制科学与工程专业大学排名,其中排名第一的是清华大学,排名第二的是哈尔滨工业大学,排名第三的是浙江大学。
作为清华大学实施国家“211工程”和“985工程”的重点学科,自动化学院的控制科学与工程一级学科在历次全国学科评估中均名列第一。
下面是启道考博整理的关于清华大学控制科学与工程专业考博相关内容。
一、专业介绍控制科学与工程是研究控制的理论、方法、技术及其工程应用的学科。
控制科学以控制论、系统论、信息论为基础,研究各应用领域内的共性问题,即为了实现控制目标,应如何建立系统的模型,分析其内部与环境信息,采取何种控制与决策行为;而与各应用领域的密切结合,又形成了控制工程丰富多样的内容。
本学科点在理论研究与工程实践相结合、学科交叉和军民结合等方面具有明显的特色与优势,对我国国民经济发展和国家安全发挥了重大作用。
它是20世纪最重要和发展最快的学科之一,其各阶段的理论发展及技术进步都与生产和社会实际需求密切相关。
包括本学科下设的七个二级学科:"控制理论与控制工程"、"检测技术与自动装置"、"系统工程"、"模式识别与智能系统"、"导航、制导与控制"、"企业信息化系统与工程"和"生物信息学"。
清华大学自动化学院控制科学与工程专业在博士招生方面,划分为十六个研究方向:081100 控制科学与工程博士研究方向:01 控制理论与控制工程,02 复杂制造系统建模、控制与优化,03仿真与虚拟制造,04 网络化制造,05导航、制导与控制,06 应用电子技术,07 自动检测技术,08 系统工程理论与方法,09 智能交通系统,10 网络化系统、决策理论与应用,11 模式识别与机器学习,12 信号处理,13 生物信息学(A),14 海洋信息,15 生物信息学(B),16 网络化系统;能源、电力与制造系统优化。
![自动化 控制科学与工程[自动化]各重点大学考研专业课目录 绝对有用!!!](https://uimg.taocdn.com/6a1814c3d5bbfd0a795673da.webp)
控制科学与工程[自动化]招生单位专业课类比本表所统计专业课的仅是“0811 控制科学与工程”一级学科下属的几个专业(二级学科)。
双控=控制理论与控制工程;检测=检测技术与自动化装置;系统=系统工程;模式=模式识别与智能系统;导航=导航、制导与控制;复试——指的是复试笔试科目。
此仅为部分重点院校或重点专业;部分学校的同一名称的专业分布在不同的学院,也一并列出。
还有若干学校复试信息不完全,请予以补充;如果信息有误,请指明。
北京工业大学421自动控制原理复试:1、电子技术 2、计算机原理北京航空航天大学[双控] 432控制理论综合或433控制工程综合[检测] 433控制工程综合或436检测技术综合[系统] 431自动控制原理或451材料力学或841概率与数理统计[模式] (自动化学院)433控制工程综合或436检测技术综合、(宇航学院)423信息类专业综合或431自动控制原理或461计算机专业综合[导航] (自动化学院)432控制理论综合或433控制工程综合、(宇航学院)431自动控制原理复试:无笔试。
1) 外语口语与听力考核;2) 专业基础理论与知识考核;3) 大学阶段学习成绩、科研活动以及工作业绩考核;4) 综合素质与能力考核北京化工大学440电路原理复试:综合1(含自动控制原理和过程控制系统及工程)、综合2(含自动检测技术装置和传感器原理及应用)、综合3(含信号与系统和数字信号处理)注:数学可选择301数学一或666数学(单)北京交通大学[双控/检测]404控制理论[模式]405通信系统原理或409数字信号处理复试:[电子信息工程学院双控]常微分方程[机械与电子控制工程学院检测]综合复试(单片机、自动控制原理)[计算机与信息技术学院模式] 信号与系统或操作系统北京科技大学415电路及数字电子技术(电路70%,数字电子技术30%)复试: 1.数字信号处理 2.自动控制原理 3.自动检测技术三选一北京理工大学410自动控制理论或411电子技术(含模拟数字部分)复试:微机原理+电子技术(初试考自动控制理论者)、微机原理+自动控制理论(初试考电子技术者)、运筹学+概率论与数理统计。
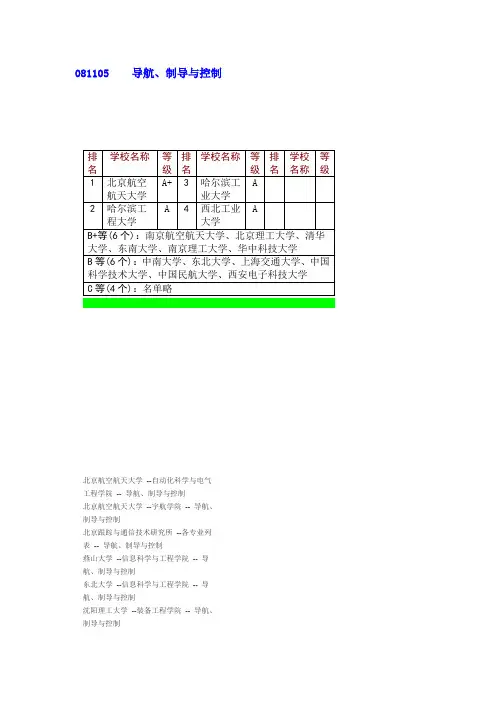
081105 导航、制导与控制北京航空航天大学--自动化科学与电气工程学院-- 导航、制导与控制北京航空航天大学--宇航学院-- 导航、制导与控制北京跟踪与通信技术研究所--各专业列表-- 导航、制导与控制燕山大学--信息科学与工程学院-- 导航、制导与控制东北大学--信息科学与工程学院-- 导航、制导与控制沈阳理工大学--装备工程学院-- 导航、制导与控制东北电力大学--自动化工程学院-- 导航、制导与控制哈尔滨工程大学--自动化学院-- 导航、制导与控制中国科学技术大学--信息学院自动化系-- 导航、制导与控制武汉大学--卫星导航定位技术研究中心-- 导航、制导与控制上海交通大学--电子信息与电气工程学院-- 导航、制导与控制上海交通大学--空天科学技术研究院-- 导航、制导与控制武汉科技大学--信息科学与工程学院-- 导航、制导与控制中南大学--信息科学与工程学院(信息学院)-- 导航、制导与控制山东科技大学--信息与电气工程学院-- 导航、制导与控制昆明理工大学--信息工程与自动化学院-- 导航、制导与控制西安电子科技大学--电子工程学院-- 导航、制导与控制西北工业大学--航天学院-- 导航、制导与控制西北工业大学--自动化学院-- 导航、制导与控制东南大学--仪器科学与工程系-- 导航、制导与控制南京航天航空大学--自动化学院-- 导航、制导与控制南京航天航空大学--航天学院-- 导航、制导与控制南京理工大学--自动化系-- 导航、制导与控制南京理工大学--瞬态物理国家重点实验室-- 导航、制导与控制浙江大学--信息科学与工程学院-- 导航、制导与控制浙江大学--航空航天学院-- 导航、制导与控制浙江工业大学--信息工程学院-- 导航、制导与控制。
[Page1,2]信息学院本科培养方案面向电子科学与技术、电子信息工程、计算机科学与技术、自动化等四个专业及示范性软件学院计算机软件专业,构建具有各专业公共知识基础的学院平台课程体系以及具有一定特长的专业核心课程体系,强调对学生进行基本理论、基础知识、基本能力(技能)以及健全人格、综合素质和创新精神培养,为学生提供增强基础、选择专业的机制。
一培养目标自动化专业的本科生运用所掌握的理论知识和技能,从事国民经济、国防和科研各部门的运动控制、过程控制、机器人智能控制、导航制导与控制、现代集成制造系统、模式识别与智能系统、生物信息学、人工智能及神经网络、系统工程理论与实践、新型传感器、电子与自动检测系统、复杂网络与计算机应用系统等领域的科学研究、技术开发、教学及管理工作。
二学制与学位授予本科学制4年,对完成并符合本科培养方案要求的学生授予工学学士学位。
按照学分制管理机制,实行弹性学习年限(最长6年)。
三基本学分学时1、培养总学分:不少于170,其中春、秋季学期课程总学分不少于140或145,平均周学时为20;2、夏季学期实践环节15学分,综合论文训练10或15学分。
四、课程结构与学分要求1.人文社科类课程必修不少于35学分其中:" "两课": 必修5门,14学分10610022 思想道德修养2学分(秋)10610013 毛泽东思想概论3学分(春、秋)10610033 马克思主义政治经济学原理3学分(春、秋)10610043 邓小平理论概论3学分(春、秋)10610053 马克思主义哲学原理3学分(春、秋)" 体育课: 1门,4学分第1~4学期的体育(1)~(4)为必修,每学期1个学分;第5~7学期的体育专项为限选,不设学分,计通过与不通过;第8学期的体育为任选。
体育学分不够或不通过者不能获得学士学位。
" 外语课:1门,4学分英语:实行以英语水平考试I为标志的目标管理模式,学生必须通过水平考试I,并取得4学分,才能获得本科毕业资格及学士学位授予资格。
基于脉冲神经网络的机器人智能控制研究进展目录一、内容综述 (2)1.1 背景与意义 (3)1.2 国内外研究现状 (4)1.3 研究内容与方法 (5)二、脉冲神经网络概述 (6)2.1 脉冲神经网络基本原理 (7)2.2 脉冲神经网络与传统神经网络的区别 (8)2.3 脉冲神经网络的优点与挑战 (9)三、基于脉冲神经网络的机器人控制方法 (10)3.1 基于脉冲神经网络的轨迹规划方法 (12)3.2 基于脉冲神经网络的路径跟踪方法 (13)3.3 基于脉冲神经网络的自主导航方法 (14)四、脉冲神经网络优化算法研究 (15)4.1 神经网络权重优化方法 (17)4.2 神经网络结构优化方法 (18)4.3 脉冲神经网络的参数优化策略 (20)五、脉冲神经网络在机器人智能控制中的应用案例 (21)5.1 在机器人路径跟踪中的应用 (23)5.2 在机器人自主导航中的应用 (24)5.3 在机器人情感识别中的应用 (25)六、结论与展望 (27)6.1 研究成果总结 (28)6.2 存在的问题与不足 (29)6.3 未来发展方向与展望 (29)一、内容综述随着科技的飞速发展,机器人智能控制技术在众多领域的应用逐渐深入。
在这一背景下,基于脉冲神经网络的机器人智能控制研究成为当前的研究热点。
脉冲神经网络,以其模拟生物神经系统脉冲传递信息的独特方式,在信息处理与计算领域展现出强大的潜力。
特别是在机器人控制领域,脉冲神经网络为机器人提供了更加灵活、高效的智能控制手段。
基于脉冲神经网络的机器人智能控制研究取得了显著的进展,脉冲神经网络以其独特的动态特性和时空编码机制,在机器人控制任务中展现出优异的性能。
研究者在机器人路径规划、动态决策、自适应控制等方面进行了深入研究,并取得了一系列重要突破。
随着深度学习技术的发展,深度脉冲神经网络在机器人控制中的应用也逐渐增多,为复杂环境下的机器人智能控制提供了新的解决方案。
专业介绍:导航、制导与控制一、专业介绍导航、制导与控制专业隶属于控制科学与工程一级学科。
1、研究方向目前,各大院校与导航、制导与控制专业相关的研究方向都略有不同的侧重点。
以哈尔滨工程大学为例,该专业研究方向有:01现代舰船综合导航技术02自主水下航行器控制03新型惯性器件与高精度导航系统04水下导航技术05卫星无线电导航技术06飞行器制导与控制2、培养目标本学科培养德、智、体全面发展,在导航、制导与控制学科内掌握坚实的基础理论和系统的专门知识,了解国内外导航及自动化领域的先进技术、理论的发展动向,具有从事科学研究、教学工作或独立担负与本学科有关的专门技术工作和具有创新能力,能用外语阅读本专业书刊并撰写论文摘要的高级专门人才。
3、专业特色导航、制导与控制是以数学、力学、控制理论与工程、信息科学与技术系统科学、计算机技术、传感与测量技术、建模与仿真技术为基础的综合性应用技术学科。
该学科研究航天、航空、航海、陆行各类运动体的位置、方向、轨迹、姿态的检测、控制及其仿真,是国防武器系统和民用运输系统的重要核心技术之一。
4、研究生入学考试科目:初试科目:①101思想政治理论②201英语一、202俄语、203日语任选其一③301数学一④809自动控制原理(注:以哈尔滨工程大学为例,各院校在考试科目中有所不同)二、推荐院校导航、制导与控制专业硕士全国招生较强的单位有北京航空航天大学、哈尔滨工程大学、哈尔滨工业大学、南京理工大学。
三、就业前景(一)天文导航技术发展迅速随着我国国防技术的发展,天文导航技术在航天、航空、航海领域的需求日益强烈,技术发展十分迅速,航天事业的发展迎来了天文导航技术的辉煌。
近年来,我国的载人航天技术极大地促进了天文导航技术在航天领域的发展。
随着新一轮月球和火星探测等一系列深空探测活动的开展,天文导航以其自主性强、精度高、成本低廉等特点在深空探测领域也得到了越来越广泛的应用。
天文导航技术在航海、航天和航空各方面得到蓬勃发展,目前已成为舰船、卫星和深空探测器必不可少的关键技术,同时还是中远程弹道导弹、运载火箭和高空远程侦察机等的重要辅助导航手段,而在未来人类探索宇宙的星际航行中也必将发挥重要的作用。
自动化专业大学排名_中国自动化专业类实力最强大学排名全国一共有83所开设自动化专业的大学参与自动化专业大学排名,其中排名第一的是清华大学,排名第二的是东北大学,排名第三的是哈尔滨工业大学,下面店铺分享了自动化专业大学排名,一起来了解吧。
自动化专业大学排名自动化专业大学排名1、清华大学清华大学于自动化专业聘请了国际著名控制科学家、美国工程院院士、中国科学院和中国工程院两院外籍院士、哈佛大学何毓琦教授和国际著名生物信息学和系统生物学家、美国科学院院士、南加州大学W.S.Waterman教授担任讲席教授等担任客座教授。
专业方向包括工业企业电气化与自动化专业、自动学与远动学专业、热能动力装置专业中的热力设备自动化专门化以及热工量测及自动控制专业等。
自动化系非常重视国内外学术交流,加强与国外著名大学和研究机构的交流与合作,派出年轻的骨干教师到美国哈佛大学、加州大学、耶鲁大学等著名大学进修访问,参加国际学术会议;邀请国外著名学者来校作学术报告、讲学和合作研究。
自1987年以来,自动化系先后主办了20多次国际学术会议,21次国内学术会议。
同时,还与欧盟、美国、加拿大、日本的科研单位和高等院校有正式的科研合作关系和定期学术交流活动,很多教师在国际、国内学术机构中担任重要学术职务。
自动化系还十分重视与国际知名跨国企业的合作,近年来分别与美国、德国和日本的罗克威尔自动化公司、倍加福公司、NEC公司和欧姆龙公司建立联合实验室外,与美国联合技术公司研究院、日本的兄弟公司等企业签署了合作科研项目。
自动化专业大学排名2、东北大学东北大学的自动化专业始建于20世纪50年代。
半个多世纪以来为国家培养了大批优秀人才。
该专业教学力量雄厚、实验设备先进,依托的“控制理论与控制工程”学科在国内学科评比中一直名列前茅。
该专业培养能够从事工业企业、国防、高校和科研部门的运动控制、过程控制、导航制导与控制、现代集成制造系统、模式识别与智能控制、人工智能与机器人、系统工程、现代检测技术、信号处理与控制、网络与计算机应用等领域的科学研究、技术开发、工程应用与组织管理的高素质、创新型、复合型高级人才。
自动化专业考研应该选择哪个方向?1)从全国各校的宏观来看国内自动化专业的好地方不少,但研究的方向重点都各有不同,比较好的有(可能不全,望指正)北京:清华大学;中科院自动化研究所;北京理工大学;北京航天航空大学天津:天津大学江浙:上海交通大学;浙江大学;东南大学;华中:国防科技大学;华中科技大学东北:哈尔滨工业大学;东北大学;中科院沈阳自动化研究所;西部:西安交通大学2)以清华为主要介绍对象就各个方向说一下1、控制理论与控制工程:拥有这个方向的国家重点学科的学校有:清华大学北京理工大学东北大学上海交通大学东南大学浙江大学西北工业大学清华大学研究领域广度深,在拥有传统优势的控制理论与控制工程方面极负盛誉清华的控制工程与控制工程,分为了3个研究所:系统集成研究所,过程控制研究所和控制理论研究所。
毫无疑问,系统集成(也就是CIMS)研究所实力最强,有院士和CIMS国家工程中心;控制理论所也很强,而且基本上老师都有项目,很少有搞纯理论的了;过程所也挺强,老师实力也很强,但方向比较明确,就是过程控制,多用于化工厂等地方的生产流程的总体控制,多用到总线、动态控制之类的东西2、检测技术与自动化装置:拥有这个方向的国家重点学科的学校有:天津大学浙江大学这个方向实用性很强,和仪表,测试等方向很接近,也只有这个方向是自动化的几个二级学科里是完全偏硬件(当然也有软件,但很少)的清华的这个方向从表面看来实力一般,其实不然,且不说牛人要靠自己努力,单说导师的情况,也许没有别的所博导多,但是我所知道的检测所导师都非常的负责(尤其是硕导),而且有项目,虽然不像CIMS有那种很大的横向项目,但是做小项目有效项目的好处,就是能接触到项目的整个过程,再加上老师的负责指导,对能力的提高就不必多言了吧。
所以检测所非常非常的适合读硕士。
当然前提是大家要对单片机,DSP,FPGA之类的硬件感兴趣,呵呵3、系统工程:拥有这个方向的国家重点学科的学校有:华中科技大学西安交通大学这个方向相对其他几个方向来说比较年轻,但他的作用也不容忽视,系统工程国内搞得比较多的是智能决策、智能交通等,说白了,有点像管理,是研究如何提高效率的。
清华大学自动化系导航与控制研究中心
招聘博士后研究人员
清华大学自动化系导航与控制研究中心拟招聘博士后研究人员2~3名。
主要研究领域包括:
1、综合航空电子系统设计与分析
2、综合导航系统信息融合理论与方法研究
3、先进飞行控制系统理论与方法研究
4、飞行管理系统设计与应用研究
5、航空推力矢量控制及飞/推一体化控制
应聘人员要求:
1.博士论文研究方向需与上述招聘涉及的技术内容相关;
2.具有独立从事高水平学术研究活动的能力,尤其是从事交叉性学科研究;
3.良好的学科知识和技能功底,熟练掌握英语;
4.具有较强的团结协作精神和研究能力;
5. 符合清华大学招收博士后研究人员的基本要求。
工作单位:清华大学自动化系导航与控制研究中心
合作导师:程农研究员
联系方式:
请将简历、电话、email等信息发到: jhy@
或邮寄到100084北京清华大学中央主楼423赵老师收。