控制工程基础习题答案_清华大学出版社_沈艳_孙锐主编
- 格式:pdf
- 大小:1.13 MB
- 文档页数:35
第2章系统的数学模型(习题答案)2.1什么是系统的数学模型?常用的数学模型有哪些?解:数学模型就是根据系统运动过程的物理、化学等规律,所写出的描述系统运动规律、特性、输出与输入关系的数学表达式。
常用的数学模型有微分方程、传递函数、状态空间模型等。
2.2 什么是线性系统?其最重要的特性是什么?解:凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要的特性就是它满足叠加原理。
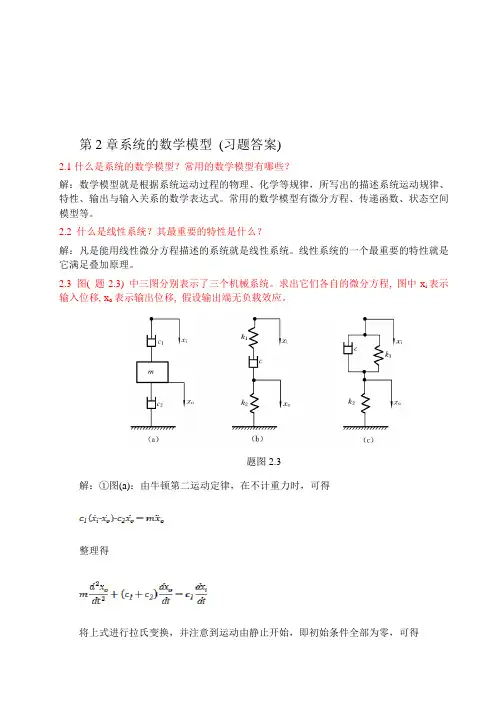
2.3 图( 题2.3) 中三图分别表示了三个机械系统。
求出它们各自的微分方程, 图中x i表示输入位移, x o表示输出位移, 假设输出端无负载效应。
题图2.3解:①图(a):由牛顿第二运动定律,在不计重力时,可得整理得将上式进行拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得[]于是传递函数为②图(b):其上半部弹簧与阻尼器之间,取辅助点A,并设A点位移为x,方向朝下;而在其下半部工。
引出点处取为辅助点B。
则由弹簧力与阻尼力平衡的原则,从A和B两点可以分别列出如下原始方程:消去中间变量x,可得系统微分方程对上式取拉氏变换,并记其初始条件为零,得系统传递函数为③图(c):以的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:移项整理得系统微分方程对上式进行拉氏变换,并注意到运动由静止开始,即则系统传递函数为2.4试建立下图(题图2.4)所示各系统的微分方程并说明这些微分方程之间有什么特点,其中电压)(t u r 和位移)(t x r 为输入量;电压)(t u c 和位移)(t x c 为输出量;1,k k 和2k 为弹簧弹性系数;f 为阻尼系数。
+-+-u )tfC)+-+-f)(a )(b )(c )(d R题图2.4【解】:)(a方法一:设回路电流为i ,根据克希霍夫定律,可写出下列方程组:⎪⎩⎪⎨⎧=+=⎰i R u u dt i C u cc r 1消去中间变量,整理得:dtdu RC u dt du RCrc c =+方法二:dtdu RC u dt du RCRCs RCs CsR R s U s U rc c r c =+⇒+=+=11)()( 由于无质量,各受力点任何时刻均满足∑=0F ,则有:cc r kx dt dxdt dx f =-)(dtdx k f x dt dx k f rc c =+⇒()r r c c r c u dtduC R u dt du C R R Cs R R Cs R Cs R R CsR s U s U +=++⇒+++=+++=221212212)(1111)()( 设阻尼器输入位移为a x ,根据牛顿运动定律,可写出该系统运动方程r rc c aa c a r c r x dtdx k f x dt dx f k k k k dt dx f x x k x x k x x k +=++⇒⎪⎩⎪⎨⎧=--=-22121221)()()( 结论:)(a 、)(b 互为相似系统,)(c 、)(d 互为相似系统。
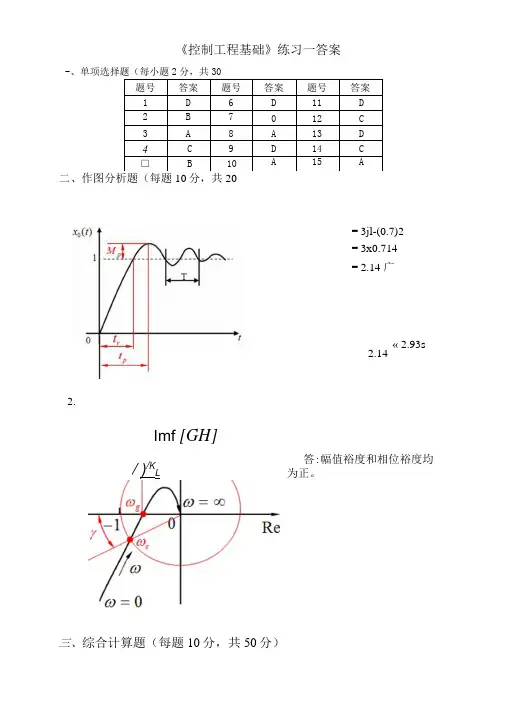
《控制工程基础》练习一答案-、单项选择题(每小题2分,共30题号答案题号1D6 2B7 3A8 4C9□B10答案题号答案D11D 012C A13D D14C A15A二、作图分析题(每题10分,共20= 3jl-(0.7)2= 3x0.714= 2.14 广2.14« 2.93s 2.Imf [GH]/)/K L答:幅值裕度和相位裕度均为正。
三、综合计算题(每题10分,共50分)10010101、解: 由题意可写出Gg(s) = -------------- = ------------------ ,s(s + 10) + k 10s+ 100 根据二阶系统的标准形式可知:气2 = ] 00,2初=10 .・. co n = 10,S = 0.5:.M = e xlOO% = 16.4%,/ = ----------------- f= 0.363s,八=-^― — 0.8s「 1口〃"2、解:由题意得系统的开环频率特性为:G"问)=, k /以,2口 + 1)(,0.5切+1) A (69) = —/ 七 ,(p(co )= -90° - tg 10.569- tg 12a )6A/1+467 71 + 0.256?当口=使时,(p^co*) = -90° -tg~l0.5绥,一鬼一'2绥=-180° => 饱=14/、 10 10zy )= ___ = 4 g « J1+4.2 J1+0.25 绥 2 V5A /L25・・・《(dB) = 201g-^- = 201g :=-UdB g *(饱) 4o3、解:由题意得G R (S ) = ---- ---- =—-—,其频率特性为2s + 15 + 5 2s + 20 A 例=/5 = -5 =,伊(口)= _侦_\ 2L,7(2^y)2+ 202VW+40010由输入信号可知,X,. = 20=2*.(口) = 45°,根据频率响应的特点,有 x o (O = x o (69)sin[6/ + ^(69)] = A (69)匚K sin[2? +(p(cd) +(p {(69)]52=/ 、x 2 sin[2, + (Tg—I 二)+ 45°] = 0.49 sin(2f + 33.69°) V4X22+4001。
第一章习题解笞U]>U2 U\ U2第二章习题解答2-1a) b)d)f)L^f| 忙d)f\ — fl =^2X O严(f)=$(M+E ⑴虑 如(f) =iQ)RRC^-u o (t)^u o (t) = RC^-u^t) at at fs (r)=B 低[xi (f) -曲(幼 j/B (t)=fK (t) = KXo(t) B dB d 『八10602斤不%()+%©二斤击可()占dR^c —% (0+ (*i + 心)% ⑴=邛应 ~u i (0+ R 2u t (0 atati =i R +,C u o =IR?:R R 严冃3宙 % =gR\ +u oa)=K ](旳一兀)+」:dx o ](J?l + J?2)C —«c (!)+ %("■ R Q C — Wj(O + tti (Oat at(K[ + K2)B — x o (t)+ K\K2X o (t)= K\R 〒曲(f)+ 琦心再(f)dt at10602a) b) c) Q © f)U Q —1/?2 + — j icit— Z/?| + iR-f H —J idte)dxK\% K i (兀 _ %) = K 》(兀)—x)=号二dtoB 2+ (®K° ++ B'B? + 场*3 + 水2〃?)& 2+ (K }B 2+K }B 3 + 心汝 + KM 巴2 + K }K 2X 2 dt3J S + 2用 + 8S-丘($ + 2)($戈+2$十4)广、■炉+ 5,2+9用+7E ($+恥 + 2)乡一rn\fU2K 2rdx { dx 2< dt dt ;/(O™-坷罕~_叭 dtdxj … 一 —- - K?x^ = m dtdx l dx 2dt dt护d 2x 2 2~d^ k,用典2+ (的+创坷+用2创+加2*3);?7皿乔对)13173 G($)= --------------- —(£+。
控制工程基础第三版课后习题答案控制工程基础第三版课后习题答案控制工程是一门涉及到系统控制与优化的学科,它是现代工程技术的重要组成部分。
掌握控制工程的基础知识对于工程师来说至关重要。
而《控制工程基础》这本教材则是控制工程学习的重要参考书之一。
本文将为读者提供《控制工程基础第三版》课后习题的答案,希望能够帮助读者更好地理解和掌握这门学科。
第一章:控制系统基础知识1. 什么是控制系统?控制系统是由一系列相互关联的元件和设备组成的,用于实现对某个过程或系统的控制和调节的系统。
2. 什么是开环控制系统?开环控制系统是指输出信号不受输入信号的影响,只根据事先设定的控制规律进行控制的系统。
3. 什么是闭环控制系统?闭环控制系统是指输出信号受到输入信号的反馈影响,根据反馈信号对输出信号进行调节的系统。
4. 什么是传递函数?传递函数是指输出变量与输入变量之间的关系,通常用一个分子多项式除以一个分母多项式的形式来表示。
5. 什么是稳定性?稳定性是指系统在受到干扰或参数变化的情况下,能够保持稳定状态的能力。
第二章:线性系统的数学模型1. 什么是线性系统?线性系统是指系统的输入和输出之间存在线性关系的系统。
2. 什么是状态空间模型?状态空间模型是用状态变量来描述系统动态行为的数学模型。
3. 什么是传递函数模型?传递函数模型是用传递函数来描述系统输入和输出之间关系的数学模型。
4. 如何从状态空间模型转换为传递函数模型?可以通过拉普拉斯变换将状态空间模型转换为传递函数模型。
5. 如何从传递函数模型转换为状态空间模型?可以通过分解传递函数为部分分式的形式,然后利用反变换将其转换为状态空间模型。
第三章:控制系统的时域分析1. 什么是单位阶跃响应?单位阶跃响应是指系统在输入信号为单位阶跃函数时的响应。
2. 什么是阻尼比?阻尼比是指系统的阻尼系数与临界阻尼系数之间的比值。
3. 什么是超调量?超调量是指系统响应的峰值与稳态值之间的差值。