控制工程基础第三版习题答案-清华大学出版社董景新
- 格式:doc
- 大小:7.41 MB
- 文档页数:65
控制工程基础课后习题及答案下面是控制工程基础课后习题及答案的一个示例,供参考。
1.什么是控制工程?答:控制工程是一门研究如何设计、分析和实现控制系统的工程学科。
它涉及到自动控制理论、系统建模、信号处理、电路设计等多个领域。
2.控制系统的基本组成部分有哪些?答:控制系统的基本组成部分包括传感器、执行器、控制器和反馈系统。
传感器用于获取被控对象的状态信息,执行器用于实现控制指令,控制器用于生成控制指令,反馈系统用于将被控对象的输出信息反馈给控制器进行调节。
3.什么是开环控制系统和闭环控制系统?答:开环控制系统是指控制器的输出不受被控对象输出的影响,只根据预先设定的控制指令进行控制。
闭环控制系统是指控制器的输出根据被控对象的输出进行调节,通过反馈系统实现控制。
4.请简述PID控制器的工作原理。
答:PID控制器是一种常用的控制器,其工作原理基于对误差信号进行比例、积分和微分处理。
比例项根据误差的大小产生控制指令,积分项根据误差的累积产生控制指令,微分项根据误差的变化率产生控制指令。
PID控制器的输出是这三个项的加权和。
5.什么是控制系统的稳定性?答:控制系统的稳定性指的是在系统输入变化或外部干扰的情况下,系统输出能够保持在可接受范围内的能力。
稳定的控制系统可以实现良好的跟踪性能和抗干扰能力。
6.如何评价一个控制系统的稳定性?答:一个控制系统的稳定性可以通过判断系统的极点位置来评价。
如果系统的所有极点都位于左半平面,则系统是稳定的;如果系统存在极点位于右半平面,则系统是不稳定的。
7.什么是系统的过渡过程和稳定过程?答:系统的过渡过程指的是系统从初始状态到稳定状态的过程,包括系统的响应时间、超调量等性能指标。
系统的稳定过程指的是系统在达到稳定状态之后的行为,包括稳态误差、稳定精度等性能指标。
8.如何设计一个稳定的控制系统?答:设计一个稳定的控制系统需要满足系统的稳定性条件,例如极点位置的要求。
可以通过选择合适的控制器参数、采用合适的控制策略等方式来实现系统的稳定性。
控制工程基础第三版课后答案第一章1.1 分析控制系统的对象控制系统的对象通常指的是待控制的物理系统或过程。
在分析控制系统对象时,首先需要了解系统的动态特性。
为了分析控制系统的特性,我们可以通过选取一个合适的数学模型来描述物理系统的动态行为。
一种常用的方法是通过微分方程来描述系统的动态特性。
例如,对于一个简单的电路系统,可以使用基尔霍夫电流定律和基尔霍夫电压定律来建立描述电路中电流和电压之间关系的微分方程。
然后,通过求解这个微分方程,我们可以得到系统的传递函数。
另外,我们还可以使用频域分析的方法来分析控制系统的对象。
通过对信号的频谱进行分析,我们可以得到系统的频率响应。
1.2 常见的控制系统对象控制系统的对象存在各种各样的形式,下面列举了一些常见的控制系统对象:•机械系统:例如机器人、汽车悬挂系统等。
•电气系统:例如电路、电机等。
•热力系统:例如锅炉、冷却系统等。
•化工系统:例如反应器、蒸馏塔等。
针对不同的控制系统对象,我们需要选择合适的数学模型来描述其动态特性,并进一步分析系统的稳定性、性能等指标。
第二章2.1 控制系统的数学模型控制系统的数学模型描述了物理系统的动态特性和输入与输出之间的关系。
常见的控制系统数学模型包括:•模型中几何图形法:通过几何图形来描述系统的动态特性。
•传递函数法:采用以系统输入和输出的转移函数来描述系统的动态特性。
•状态方程法:将系统的状态变量与输入变量和输出变量之间的关系用一组偏微分方程或代数方程来描述。
在使用这些模型时,我们可以选择合适的数学工具进行分析和求解,例如微积分、线性代数等。
2.2 传递函数的定义和性质传递函数是描述控制系统输入输出关系的数学函数,通常用G(s)表示。
传递函数的定义和性质如下:•定义:传递函数G(s)是系统输出Y(s)和输入U(s)之间的比值,即G(s) = Y(s)/U(s)。
•零点和极点:传递函数可以有零点和极点,零点是使得传递函数为零的s值,极点是使得传递函数为无穷大的s值。

目录第一章 (1)第二章 (4)第三章 (21)第四章 (34)第五章 (41)第六章 (47)第七章 (61)C第一章1-1解:(1)B (2) B (3)B (4)A1-2解:优点缺点开环简单,不存在稳定性问题精度低,不抗干扰闭环精度高,抗干扰复杂,设计不当易振荡1-3解:(1)自行车打气如图1-1所示职能方块图,为闭环系统。
图1-1(2)普通电烙铁的职能方块图如图1-2所示,为开环系统。
图1-2(3)车玩具的职能方块图如图1-3所示,为开环系统。
图1-3(4)船自动舵的职能方块图如图1-4所示,为闭环系统。
图1-4(5)灯自动开关的职能方块图如图1-5所示,为开环系统。
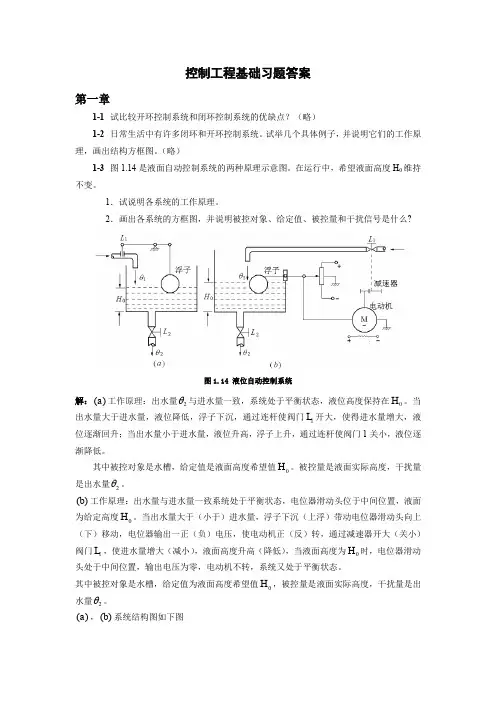
图1-51-4解:系统输入量:被记录的电压信号U2系统输出量:记录笔的位移L被控对象:记录笔1-5解:(a):对于图(a)所示的系统,水箱中输出流量和输入流量决定了水箱的水位变化,水位的高低决定了浮球的位置,流量通过杠杆机械对应阀门的开启大小,阀门的大小决定输入流量补偿输出流量,最终水位保持一定值。
其职能方块图如下图所示:(b):对于(b)图所示的系统,控制水位的过程与图(a)系统中浮球的位置通过杠杆机构操纵双向触点电开关,两个触点电机正、反转,电机的正、反转对应阀门的开大、开小,系统由于使用了电机,系统的反应加快,其职能方块图如下图所示:1-6:试画出实验室用恒温箱职能方块图。
解:根据一般实验室用恒温箱的工作原理图,画出其职能方块图如下:(注:1-5中有部分文学是根据上下文理解的,因为原版中缺失;1-6为类似书中原体,不是原体,请注意!)第二章2-1 解:(1): )](12[)](1[)](5[)]()4[()(t L t t L t L t t L S F ⋅+⋅++=δδ SS S S 215215022++=+++= (2): )25(253)(2++=s s S F(3): 11)(2++=-s e S F sπ(4): )}(1)6(1)]6(2cos 4{[)(5t e t t L S F t ⋅+-⋅-=-ππ5144512426226+++=+++=--S s Se S s Se ss ππ (5): Se S e S F ss 226600)(--+=+++= (6): )]4(1)90453cos(6[)(π-⋅--=t t L S F9636)]4(1)4(3cos 6[24224+=+=-⋅-=--S SeS Se t t L S Sππππ(7): )](18sin 25.0)(18cos [)(66t t e t t e L S F t t ⋅+⋅=--1001288)6(28)6(622222+++=++++++=S S S S S S (8): 99)20(52022)(262++++++=-s es s S F sπ2-2 解:(1): )(1)2()3221()(321t e e S S L t f t t ⋅+-=+++-=--- (2): )(12sin 21)(t t t f ⋅=(3): )(1)2sin 212(cos )(t t t e t f t ⋅+=(4): )1(1)1()(11-⋅=-=---t e S e L t f t s(5): )(1)22()(2t e e te t f t t t ⋅-+-=---(6): )(1215sin 15158))215()21(21515158()(2221t t e S L t f t⋅=++⋅=-- (7): )(1)3sin 313(cos )(t t t t f ⋅+=2-3 解:(1) 对原方程取拉氏变换,得:SS X x S SX x Sx S X S 1)(8)]0()([6)0()0()(2=+-+--⋅∙ 将初始条件代入,得:61)()86(1)(86)(6)(22++=++=+-+-S SS X S S SS X S SX S S X S48724781)86(16)(22+-++=++++=S S S S S S S S S X 取拉氏反变换,得:t t e e t x 42874781)(---+=(2) 当t=0时,将初始条件50)0(=∙x 代入方程,得:50+100x(0)=300 则x(0)=2.5对原方程取拉氏变换,得: sx(s)-x(0)+100x(s)=300/s 将x(0)=2.5代入,得:S300100X(S)2.5-SX(S)=+1005.03100)S(S 3002.5S X(S)+-=++=s s取拉氏反变换,得:-100t 0.5e -3x(t)=2-4解:该曲线表示的函数为:)0002.0(16)(-⋅=t t u则其拉氏变换为:se s U s0002.06)(-=2-5 解:)0()0()(3)(2)(2)(30100==+=+i i x y t x dtt dx t y dt t dy 将上式拉氏变换,得:2332)()()()32()()23()(3)(2)(2)(30000++=+=++=+S S S X S Y S X S S Y S S X S SX S Y S SY i i i i23-S 32-S Z p ==∴零点极点又当 时)(1)(t t x i =S S X i 1)(=SS S S X S X S Y S Y i i 12332)()()()(00⋅++=⋅= 3212332)()0(2312332)()(limlim lim lim 000000=⋅++⋅=⋅=∴=⋅++⋅=⋅=∞∴∞→∞→→→S S S S S Y S y S S S S S Y S y s s s s2-6 解:(a )传递函数:132123233321123233321232333211111H G G G H G G H G G G G H H G G H G G G G H G G H G G G G R C+++=⋅++⋅+++⋅=(b)传递函数:(c)传递函数:(d)传递函数:32121212211211H G G H H G G H G H G G G R C++++=2-7 解:通过方块图的变换,系统可等价为下图:2-8 解:2-9 解:(a)(c)(d)(f)(g)2-10 解:(a)(b)(c)2-11 解:(a)(b)(c)(d)2-12 解:(a)(b)(a)(b)2-15 解:(1)(2)2-17 解:以题可画出方块图如下:2-19解:2-20解:2-21解:(1)(2、3、4)缺2-22 以后缺第三章3-1解:3-23-3解:解:3-6 解:解:3-8 解:3-103-113-13 解:3-14解:3-153-163-17 解:3-183-20 解:3-22 解:3-23 解:3-243-25 解:3-26、3-27 缺3-28解:3-29、3-30 缺3-31解:3-32、3-33缺第四章4-1解:4-2解:4-4 解:4-6 解:(a)(c)(d)(e)4-74-8、4-9 缺4-10解:4-11解:4-12解:4-13、4-14、4-15 缺4-16解:4-17 缺4-18解:4-19、4-20、4-21 缺第五章5-15-2、5-3、5-4 缺5-55-6 缺5-75-85-9、5-10 缺5-125-13 缺5-15 缺5-16 解:5-17 缺5-18 解:解:5-20 解:5-21、5-22、5-23、5-24 缺 5-25 解:5-26 缺附题:设单位反馈的开环传递函数为)10)(2()5.0(10)(2+++=S S S S K S G试用乃氏判据确定该系统在K=1和K=10时的稳定性。
++
目录
第一章 (1)
第二章 (4)
第三章 (21)
第四章 (34)
第五章 (41)
第六章 (47)
第七章 (61)
C第一章
1-1
解:(1)B (2) B (3)B (4)A
1-2
解:
优点缺点
开环简单,不存在稳定性问题精度低,不抗干扰
闭环精度高,抗干扰复杂,设计不当易振荡1-3
解:(1)自行车打气如图1-1所示职能方块图,为闭环系统。
图1-1
(2)普通电烙铁的职能方块图如图1-2所示,为开环系统。
图1-2
(3)车玩具的职能方块图如图1-3所示,为开环系统。
图1-3
(4)船自动舵的职能方块图如图1-4所示,为闭环系统。
图1-4
(5)灯自动开关的职能方块图如图1-5所示,为开环系统。
图1-5
1-4
解:系统输入量:被记录的电压信号U2
系统输出量:记录笔的位移L
被控对象:记录笔
1-5
解:(a):对于图(a)所示的系统,水箱中输出流量和输入流量决定了水箱的水位变化,水位的高低决定了浮球的位置,流量通过杠杆机械对应阀门的开启大小,阀门的大小决定输入流量补偿输出流量,最终水位保持一定值。
其职能方块图如下图所示:
(b):对于(b)图所示的系统,控制水位的过程与图(a)系统中浮球的位置通过杠杆机构操纵双向触点电开关,两个触点电机正、反转,电机的正、反转对应阀门的开大、开小,系统由于使用了电机,系统的反应加快,其职能方块图如下图所示:
1-6:试画出实验室用恒温箱职能方块图。
解:根据一般实验室用恒温箱的工作原理图,画出其职能方块图如下:
(注:1-5中有部分文学是根据上下文理解的,因为原版中缺失;1-6为类似书中原体,不是原体,请注意!)
第二章
2-1 解:
(1): )](12[)](1[)](5[)]()4[()(t L t t L t L t t L S F ⋅+⋅++=δδ S S
S S 215215022++=+++= (2): )
25(25
3)(2++=
s s S F
(3): 1
1)(2++=-s e S F s
π
(4): )}(1)6
(1)]6(2cos 4{[)(5t e t t L S F t ⋅+-⋅-
=-π
π
5
1
44512426
226
+++=+++=
--S s Se S s Se s
s π
π
(5): S
e S e S F s
s 226600)(--+=+++= (6): )]4
(1)90453cos(6[)(π
-
⋅--=t t L S F
9
636)]4(1)4(3cos 6[2
4
224
+=+=-⋅-=--S Se
S Se t t L S S
π
πππ
(7): )](18sin 25.0)(18cos [)(66t t e t t e L S F t t ⋅+⋅=--
100
128
8)6(28)6(622222+++=++++++=
S S S S S S
(8): 9
9)20(52022)(2
6
2++++++=-s e
s s S F s
π
2-2 解:
(1): )(1)2()3
2
21(
)(321t e e S S L t f t t ⋅+-=+++-=--- (2): )(12sin 2
1
)(t t t f ⋅=
(3): )(1)2sin 2
1
2(cos )(t t t e t f t ⋅+=
(4): )1(1)1
(
)(11
-⋅=-=---t e S e L t f t s
(5): )(1)22()(2t e e te t f t t t ⋅-+-=---
(6): )(1215sin 15158))
215()21(215
15158()(22
21t t e S L t f t
⋅=++⋅=-- (7): )(1)3sin 3
1
3(cos )(t t t t f ⋅+=
2-3 解:
(1) 对原方程取拉氏变换,得:
S
S X x S SX x Sx S X S 1)(8)]0()([6)0()0()(2
=+-+--⋅
• 将初始条件代入,得:
61
)()86(1)(86)(6)(22++=
++=+-+-S S
S X S S S
S X S SX S S X S
4
87247
81)86(1
6)(2
2
+-++=++++=S S S S S S S S S X 取拉氏反变换,得:
t t e e t x 428
74781)(---+=
(2) 当t=0时,将初始条件50)0(=•
x 代入方程,得:
50+100x(0)=300 则x(0)=2.5
对原方程取拉氏变换,得: sx(s)-x(0)+100x(s)=300/s 将x(0)=2.5代入,得:
S
300
100X(S)2.5-SX(S)=+ 100
5
.03100)S(S 3002.5S X(S)+-=++=
s s
取拉氏反变换,得:
-100t 0.5e -3x (t)=
2-4
解:该曲线表示的函数为:
)0002.0(16)(-⋅=t t u
则其拉氏变换为:
s
e s U s
0002.06)(-=
2-5 解:
)0()0()
(3)
(2)(2)(3
0100==+=+i i x y t x dt
t dx t y dt t dy 将上式拉氏变换,得:
2
33
2)()()()32()()23()(3)(2)(2)(30000++=
+=++=+S S S X S Y S X S S Y S S X S SX S Y S SY i i i i
23
-S 32-S Z p ==∴零点极点
又当 时)(1)(t t x i =
S
S X i 1)(=S S S S X S X S Y S Y i
i 12332)()()()(00⋅++=⋅= 32
12332)()0(23
12332)()(lim lim lim lim 000
000=
⋅++⋅=⋅=∴=⋅++⋅=⋅=∞∴∞→∞→→→S S S S S Y S y S S S S S Y S y s s s s
2-6
解:
(a )传递函数:
1
321232333211
2
3233321232333
211111H G G G H G G H G G G G H H G G H G G G G H G G H G G G G R C
+++=
⋅++⋅+++⋅
=
(b)传递函数:(c)传递函数:
(d)传递函数:
3
2121212211211H G G H H G G H G H G G G R C
++++= 2-7 解:
通过方块图的变换,系统可等价为下图:
2-8
解:2-9
解:(a)
(b)
(c)(d)(e)
(f)(g)
2-10 解:(a)
(b)(c)
2-11 解:(a)
(b)(c)
(d)2-12
解:(a)
(b)
解:(a)
(b)2-14
2-15 解:(1)
(2)2-16 解:
2-17 解:2-18 解:
2-19 解:2-20 解:
2-21 解:(1)
(2、3、4)缺
2-22 以后缺
第三章3-1解:
3-2 3-3 解:
3-4 解:
3-5
3-6 解:
解:
3-8 解:
解:3-10 3-11 3-12
3-13 解:
3-14解:
3-15 3-16
解:3-18
解:3-20 解:
3-21
3-22 解:
3-23 解:3-24
3-25 解:
3-26、3-27 缺3-28
解:
3-29、3-30 缺3-31
解:
3-32、3-33缺
第四章4-1
解:
4-2
解:
4-4 解:
4-6 解:(a)
(b)
(c)
(d)
(e) 4-7
4-8、4-9 缺4-10
解:
4-11
解:
4-12解:
4-13、4-14、4-15 缺
4-17 缺
4-18
解:
4-19、4-20、4-21 缺
第五章
5-1
5-2、5-3、5-4 缺5-5
5-6 缺
5-7
5-8
5-9、5-10 缺5-11
5-12
5-13 缺5-14
5-15 缺5-16 解:
5-17 缺5-18 解:
5-19 解:
5-20 解:
5-21、5-22、5-23、5-24 缺 5-25 解:
5-26 缺
附题:设单位反馈的开环传递函数为
)
10)(2()
5.0(10)(2
+++=
S S S S K S G 试用乃氏判据确定该系统在K=1和K=10时的稳定性。
第六章6-1
解:
(1)
(2)
(3)(4)
=0 6-2
解:
(1)。