步进电机步进驱动器原理详细讲解剖析
- 格式:ppt
- 大小:908.00 KB
- 文档页数:50
一文搞懂步进电机特性原理及驱动器设计1、步进电机的概念步进电机是将电脉冲信号,转变为角位移或线位移的开环控制电机,又称为脉冲电机。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。
当步进驱动器接收到一个脉冲信号时,它就可以驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”。
步进电机的旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的,同时可以通过控制脉冲频率,来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机多用于数字式计算机的外部设备,以及打印机、绘图机和磁盘等装置。
2、步进电机的特点步进电机工作时的位置和速度信号不反馈给控制系统,如果电机工作时的位置和速度信号反馈给控制系统,那么它就属于伺服电机。
相对于伺服电机,步进电机的控制相对简单,但不适用于精度要求较高的场合。
步进电机的优点和缺点都非常的突出,优点集中于控制简单、精度高,缺点是噪声、震动和效率,它没有累积误差,结构简单,使用维修方便,制造成本低。
步进电机带动负载惯量的能力大,适用于中小型机床和速度精度要求不高的地方,缺点是效率较低、发热大,有时会“失步”。
优缺点如下所示。
优点:1. 电机操作易于通过脉冲信号输入到电机进行控制;2. 不需要反馈电路以返回旋转轴的位置和速度信息(开环控制);3. 由于没有接触电刷而实现了更大的可靠性。
缺点:1. 需要脉冲信号输出电路;2. 当控制不适当的时候,可能会出现同步丢失;3. 由于在旋转轴停止后仍然存在电流而产生热量。
3、步进电机的分类在相同电流且相同转矩输出的条件下,单极型步进电机比双极型步进电机多一倍的线圈,成本更高,控制电路的结构也不一样,目前市场上流行的大多是双极型步进电机。
步进电机在构造上通常主要按照转子特点和定子绕组进行分类,下面将详细介绍这两种类型的分类。
按照转子分类,有三种主要类型:反应式(VR型)、永磁式(PM型)、混合式(HB型)。

1、步进电机是一种作为控制用的特种电机, 它的旋转是以固定的角度(称为"步距角")一步一步运行的, 其特点是没有积累误差(精度为100%), 所以广泛应用于各种开环控制。
步进电机的运行要有一电子装置进行驱动, 这种装置就是步进电机驱动器, 它是把控制系统发出的脉冲信号转化为步进电机的角位移, 或者说: 控制系统每发一个脉冲信号, 通过驱动器就使步进电机旋转一步距角。
所以步进电机的转速与脉冲信号的频率成正比。
所以,控制步进脉冲信号的频率,可以对电机精确调速;控制步进脉冲的个数,可以对电机精确定位目的;
2、步进电机通过细分驱动器的驱动,其步距角变小了,如驱动器工作在
10 细分状态时,其步距角只为‘电机固有步距角‘的十分之一,也就是说:‘当驱动器工作在不细分的整步状态时,控制系统每发一个步进脉冲,电机转动1.8 °;而用细分驱动器工作在10 细分状态时,电机只转动了0.18 °,‘这就是细分的基本概念。
细分功能完全是由驱动器靠精确控制电机的相电流所产生,与电机无关。
3、驱动器细分有什么优点,为什么一定建议使用细分功能?驱动器细分后的主要优点为:完全消除了电机的低频振荡。
低频振荡是步进电机(尤其是反应式电机)的固有特性,而细分是消除它的唯一途径,如果您的步进电机有时要在共振区工作(如走圆弧),选择细分驱动器是唯一的选择。
提高了电机的输出转矩。
尤其是对三相反应式电机,其力矩比不细分时提高约30-40% 。
提高了电机的分辨率。
由于减小了步距角、提高了步距的均匀度,‘提高电机的分辨率‘是不言而喻的。

步进电机与驱动器工作原理
步进电机是一种可以将电脉冲信号转换为角位移的电动机。
其工作原理基于电磁感应的原理,包括了转子、定子和电磁线圈。
步进电机的转子通常是圆形,并包含有多个永磁体,被称为极。
定子通常由电磁线圈构成,线圈被排列成一定的几何形状,可以是单相(两个线圈)或多相(多个线圈)。
当从电源中提供适当的电流到定子线圈时,线圈会产生磁场。
步进电机的工作通过改变线圈中的电流来实现。
当电流通过一个定子线圈时,产生的磁场将吸引转子靠近该线圈的磁极。
然后,电流在另一个定子线圈上开启,而前一个线圈则关闭。
这种轮流切换的过程会导致转子在一个方向上旋转一定的角度。
为了更精确地控制步进电机的角位移,通常使用驱动器来提供适当的电流和脉冲信号。
驱动器通过控制电流的大小和方向,以及相应的脉冲信号来实现步进电机的精确运动。
总的来说,步进电机的工作原理是基于电磁感应,通过改变电流和磁场的组合来实现转子的角位移。
驱动器则负责控制电流和提供脉冲信号,以实现步进电机的精确控制。
步进电机驱动器的工作原理步进电机在控制系统中具有广泛的应用。
它可以把脉冲信号转换成角位移,并且可用作电磁制动轮、电磁差分器、或角位移发生器等。
有时从一些旧设备上拆下的步进电机(这种电机一般没有损坏)要改作它用,一般需自己设计驱动器。
本文介绍的就是为从一日本产旧式打印机上拆下的步进电机而设计的驱动器。
本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。
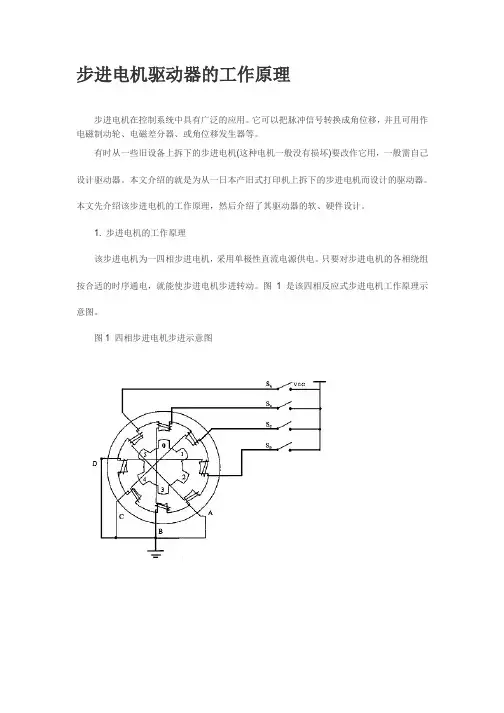
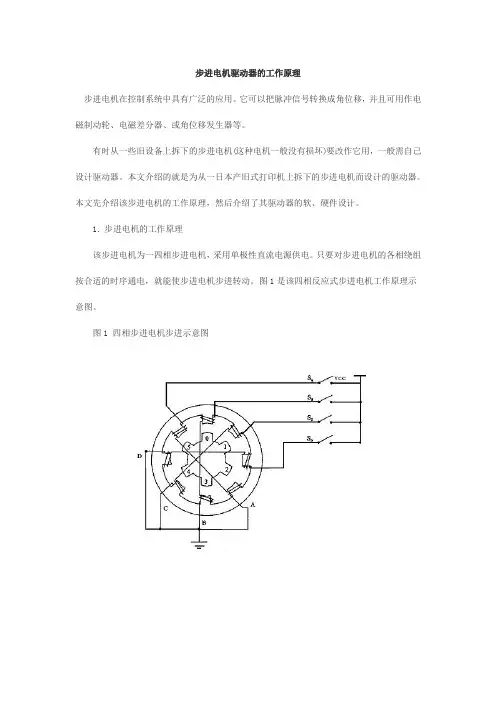
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:图2.步进电机工作时序波形图2.基于AT89C2051的步进电机驱动器系统电路原理图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
步进电机驱动器的工作原理步进电机在控制系统中具有广泛的应用。
它可以把脉冲信号转换成角位移,并且可用作电磁制动轮、电磁差分器、或角位移发生器等。
有时从一些旧设备上拆下的步进电机(这种电机一般没有损坏)要改作它用,一般需自己设计驱动器。
本文介绍的就是为从一日本产旧式打印机上拆下的步进电机而设计的驱动器。
本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:图2.步进电机工作时序波形图2.基于AT89C2051的步进电机驱动器系统电路原理图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
步进电机驱动器的工作原理
步进电机驱动器的工作原理如下:
1. 步进电机驱动器接收来自控制器的输入信号,这些信号告诉电机要旋转多少步数以及旋转方向。
2. 驱动器将输入信号转换成适合步进电机操作的电流波形。
这通常涉及将信号转换为数字脉冲,然后通过逻辑电路将脉冲转换为电流波形。
3. 电流波形被送到步进电机的线圈。
步进电机通常由多个线圈组成,当电流通过线圈时,会产生一个磁场。
4. 磁场的极性和强度的变化导致步进电机的转动。
线圈之间的磁场相互作用会导致电机转动到下一个步进角度。
5. 驱动器接收到的下一个步进信号后,会改变电流波形的极性和强度,从而改变步进电机的转动。
这样的迭代过程将使步进电机按照预定的旋转步数和方向精确地旋转。
总的来说,步进电机驱动器通过将输入信号转换为适合步进电机操作的电流波形,改变电流波形的极性和强度,以及通过线圈之间的磁场相互作用来控制步进电机的运动。
1、步进电机是一种作为控制用的特种电机, 它的旋转是以固定的角度(称为"步距角")一步一步运行的, 其特点是没有积累误差(精度为100%), 所以广泛应用于各种开环控制。
步进电机的运行要有一电子装置进行驱动, 这种装置就是步进电机驱动器, 它是把控制系统发出的脉冲信号转化为步进电机的角位移, 或者说: 控制系统每发一个脉冲信号, 通过驱动器就使步进电机旋转一步距角。
所以步进电机的转速与脉冲信号的频率成正比。
所以,控制步进脉冲信号的频率,可以对电机精确调速;控制步进脉冲的个数,可以对电机精确定位目的;2、步进电机通过细分驱动器的驱动,其步距角变小了,如驱动器工作在10细分状态时,其步距角只为‘电机固有步距角‘的十分之一,也就是说:‘当驱动器工作在不细分的整步状态时,控制系统每发一个步进脉冲,电机转动1.8°;而用细分驱动器工作在10细分状态时,电机只转动了0.18° ‘,这就是细分的基本概念。
细分功能完全是由驱动器靠精确控制电机的相电流所产生,与电机无关。
3、驱动器细分有什么优点,为什么一定建议使用细分功能?驱动器细分后的主要优点为:完全消除了电机的低频振荡。
低频振荡是步进电机(尤其是反应式电机)的固有特性,而细分是消除它的唯一途径,如果您的步进电机有时要在共振区工作(如走圆弧),选择细分驱动器是唯一的选择。
提高了电机的输出转矩。
尤其是对三相反应式电机,其力矩比不细分时提高约30-40% 。
提高了电机的分辨率。
由于减小了步距角、提高了步距的均匀度,‘提高电机的分辨率‘是不言而喻的。
细分的基木概念为:步进电机通过细分驱动器的驱动,其步距角变小了。
如驱动器工作在10细分状态时,其步距角只为‘电机固有步距角’的十分之一,也就是:当驱动器工作在不细分的整步状态时,控制系统每发一个步进脉冲,电机转动1.80;而用细分驱动器工作在10细分状态时,电机只转动了0.180。
步进电机驱动细分原理嘿,朋友们!今天咱来聊聊步进电机驱动细分原理。
这玩意儿啊,就像是一个神奇的魔法盒子,打开之后能让电机变得超级厉害!你看啊,步进电机就像是个勤劳的小毛驴,一步一步地往前走。
但如果就这么让它走,那可有点太粗糙啦。
这时候,驱动细分就闪亮登场啦!它就像是给小毛驴穿上了一双精致的小鞋子,让它每一步都走得更稳、更精确。
想象一下,没有细分的时候,电机就像个急性子,大步流星地往前冲,可能会跌跌撞撞的。
但有了细分,它就变得温柔细腻了,一小步一小步地走,多稳当呀!细分的原理其实不难理解。
就好像把一条大路分成很多很多的小段,这样走起来是不是就更轻松、更准确啦?通过细分,我们可以让电机的转动更加平滑,就像丝绸一样顺滑。
这在很多需要高精度的场合可太重要啦,比如那些精细的仪器设备,要是电机转得粗糙,那可不行哦!而且啊,细分还能让电机更省电呢!这就好比你跑步,大步跑肯定比小步跑累呀,电机也一样。
细分让它工作得更轻松,自然就不需要那么多电啦。
咱再打个比方,步进电机就像是个乐团里的鼓手,一下一下地敲着鼓。
细分呢,就是让这个鼓手敲得更有节奏、更有韵律,让整个乐团的演奏更加和谐动听。
那细分是怎么做到这些的呢?其实就是通过对电流的精细控制呀。
就像给电机喂饭一样,一点一点地喂,让它吃得饱饱的,有力气好好工作。
在实际应用中,我们可以根据不同的需求来选择细分的程度。
要是要求特别高,那就把细分调得高高的,让电机像个优雅的舞者一样精准地转动。
要是要求没那么高,那就适当降低细分,也能满足需求嘛。
总之啊,步进电机驱动细分原理真的是个很了不起的东西。
它让电机变得更强大、更精确、更节能。
这可不是我瞎吹哦,你去看看那些高科技的设备,很多都离不开细分的功劳呢!所以呀,大家可得好好了解了解这个神奇的原理,说不定哪天你就能用上呢!这就是我对步进电机驱动细分原理的理解,你觉得怎么样呢?是不是挺有意思的呀!原创不易,请尊重原创,谢谢!。
步进电机的驱动原理一、引言步进电机是一种常见的电机类型,其具有定位精度高、响应速度快、结构简单等优点,被广泛应用于数控机床、印刷设备、医疗器械等领域。
本文将介绍步进电机的驱动原理。
二、步进电机的基本结构步进电机由定子和转子两部分组成。
定子由线圈和磁铁组成,线圈通电时产生磁场,磁铁则为永久磁体或者是由电流产生的临时磁体。
转子由永磁体或者铁芯组成,其表面有若干个极对称排列的齿。
三、步进电机的工作原理当线圈通电时,会在定子内产生一个旋转的磁场,这个旋转的磁场会作用于转子上的齿,使得转子旋转一定角度。
当线圈通断交替时,就可以控制步进电机旋转一定角度。
此外,在步进电机中还存在着“全步”和“半步”的概念。
四、“全步”驱动方式在全步驱动方式下,每次给线圈通断一个脉冲,步进电机就会旋转一个固定的角度,这个角度称为步距角。
步距角的大小取决于步进电机的结构和线圈的数目。
全步驱动方式的优点是控制简单,但是定位精五、“半步”驱动方式在半步驱动方式下,每次给线圈通断一个脉冲时,步进电机会旋转一个半步距角。
当再次给线圈通断一个脉冲时,步进电机会旋转到下一个整个步距角。
半步驱动方式可以提高定位精度,但是控制复杂。
六、常见的驱动电路常见的驱动电路包括单相励磁、双相励磁和微处理器控制等。
其中单相励磁和双相励磁较为常见。
七、单相励磁驱动原理在单相励磁驱动中,每个线圈都只有一组端子连接到电源上。
当线圈通电时,产生一个磁场作用于转子上的齿,使得转子旋转一定角度。
当线圈断电时,由于惯性原因,转子会继续旋转一段距离。
单相励磁驱动方式的优点是控制简单,缺点是扭矩小、振动大。
八、双相励磁驱动原理在双相励磁驱动中,每个线圈都有两组端子连接到电源上。
当线圈通电时,产生一个磁场作用于转子上的齿,使得转子旋转一定角度。
当线圈断电时,由于惯性原因,转子会继续旋转一段距离。
双相励磁驱动方式的优点是扭矩大、振动小,缺点是控制复杂。
步进电机是一种常见的电机类型,其具有定位精度高、响应速度快等优点,在数控机床、印刷设备、医疗器械等领域得到广泛应用。
步进电机步进驱动器原理详细讲解剖析步进电机是一种可以按照指令精确旋转的电机,其精确性和可控性较高,广泛应用于各种自动化设备和机械设备中。
步进电机步进驱动器是控制步进电机旋转的主要组成部分,通过控制步进电机的电流、脉冲信号和驱动方式,实现电机的转动。
步进驱动器的作用步进驱动器的主要作用是将输入的脉冲信号转换成相应的电流,通过改变电流的方向和大小,控制步进电机的转动。
步进驱动器根据输入的脉冲信号来驱动步进电机旋转,脉冲信号的频率和脉冲数决定了步进电机的转速和旋转方向。
步进驱动器的工作原理步进驱动器的工作原理可以简单概括为:接收控制信号,根据信号的脉冲数和脉冲频率,输出相应的电流给步进电机,驱动步进电机的转动。
步进驱动器内部主要包含以下核心组件:1.逻辑控制模块:接收控制信号,根据信号的脉冲数和频率,产生相应的控制信号,用于驱动电流模块和方向模块。
2.电流模块:将逻辑控制模块输出的控制信号转换成相应的电流,通过电流控制步进电机的运行状态。
3.方向模块:根据逻辑控制模块的输出信号,控制步进电机的转动方向。
4.保护模块:用于检测电流和温度等参数,防止步进电机因过流或过热而损坏。
5.脉冲生成器:根据输入的脉冲信号,产生相应的脉冲,用于驱动步进电机。
步进驱动器的工作流程:1.接收输入的脉冲信号:步进驱动器通过接口接收输入的脉冲信号,这些信号经过编码器或控制器生成。
2.根据脉冲信号产生控制信号:逻辑控制模块根据输入的脉冲信号产生相应的控制信号,控制驱动电流和方向。
3.控制电流:电流模块将逻辑控制模块输出的控制信号转换成相应的电流,控制步进电机的运行状态。
4.控制方向:方向模块根据逻辑控制模块的输出信号控制步进电机的转动方向。
5.保护功能:保护模块可以监测电流和温度等参数,当电流过大或温度过高时,及时发出警报或停止电机运行,避免损坏电机。
步进驱动器的特点:1.精度高:步进驱动器可以精确控制步进电机的旋转角度,通常精度可达到0.9°或更低,适用于需要高精度控制的应用场合。