间歇分割器选型计算
- 格式:pdf
- 大小:115.32 KB
- 文档页数:2
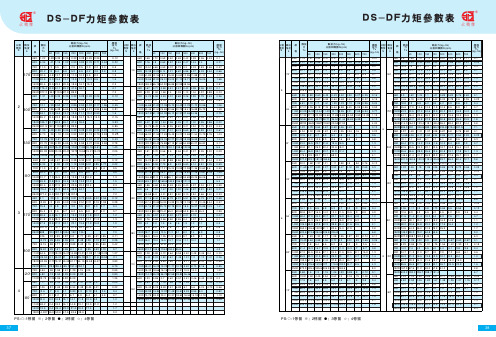
北机牌®北机牌®DS-DF力矩参数表DS-DF力矩参数表3738PS:○:1停留 ※:2停留 ●:3停留 ☆:4停留PS:○:1停留 ※:2停留 ●:3停留 ☆:4停留北机牌®北机牌®DS-DF力矩参数表DS-DF力矩参数表3940PS:○:1停留 ※:2停留 ●:3停留 ☆:4停留PS:○:1停留 ※:2停留 ●:3停留 ☆:4停留北机牌®北机牌®DS-DF力矩参数表DS-DF力矩参数表4142PS:○:1停留 ※:2停留 ●:3停留 ☆:4停留PS:○:1停留 ※:2停留 ●:3停留 ☆:4停留北机牌®北机牌®DS-DF力矩参数表DS-DF力矩参数表4344PS:○:1停留 ※:2停留 ●:3停留 ☆:4停留PS:○:1停留 ※:2停留 ●:3停留 ☆:4停留北机牌®北机牌®DS-DF力矩参数表4546精密间歇凸轮分割器-DT系列PS:○:1停留 ※:2停留 ●:3停留 ☆:4停留DT 平台桌面型此系列机种之尺寸设计特性与凸缘型功能相似,于驱动运转上可承受超大轴向负载及垂直径向压力,在输出端有一凸起固定盘面及大孔径空心轴,可搭配设置动态,静态自动化周边设备,可将动力源之电,油,气管路置于空心孔内,此系列机种广泛应用于重负载,直结自动化设备之各类机构及产业机械,作同步自动化间歇驱动。
北机牌®北机牌®精密间歇凸轮分割器-DT系列注:输入轴的CD2停留范围内的数值。
注2:C1至C5数值是连到安全系数=2时的数值。
注:输入轴的CD2停留范围内的数值。
注2:C1至C5数值是连到安全系数=2时的数值。
4748精密间歇凸轮分割器-DT系列注:输入轴的CD2停留范围内的数值。
注2:C1至C5数值是连到安全系数=2时的数值。
注:输入轴的CD2停留范围内的数值。
注2:C1至C5数值是连到安全系数=2时的数值。
凸轮分割器选型方法有哪些_凸轮分割器原理凸轮分度器,在工程上又称凸轮分割器,间歇分割器。
1926 年,美国机械师福克森(FERGUSON)生产出一台凸轮分割器,后来凸轮分割器又称福克森。
1970 年,日本SANKYO (三共制作所)推出了亚洲分割器。
1981 年,台湾TANTZU(潭子精机)推出国产分割器。
80 年代末90 年代初,台湾又相继的出现了德士(DEX)、英特士(ENTRUST)、飞技等。
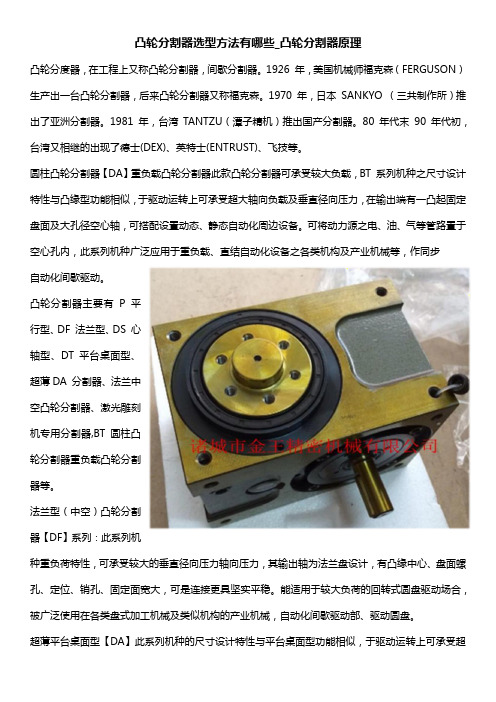
圆柱凸轮分割器【DA】重负载凸轮分割器此款凸轮分割器可承受较大负载,BT 系列机种之尺寸设计特性与凸缘型功能相似,于驱动运转上可承受超大轴向负载及垂直径向压力,在输出端有一凸起固定盘面及大孔径空心轴,可搭配设置动态、静态自动化周边设备。
可将动力源之电、油、气等管路置于空心孔内,此系列机种广泛应用于重负载、直结自动化设备之各类机构及产业机械等,作同步自动化间歇驱动。
凸轮分割器主要有P 平行型、DF 法兰型、DS 心轴型、DT 平台桌面型、超薄DA 分割器、法兰中空凸轮分割器、激光雕刻机专用分割器,BT 圆柱凸轮分割器重负载凸轮分割器等。
法兰型(中空)凸轮分割器【DF】系列:此系列机种重负荷特性,可承受较大的垂直径向压力轴向压力,其输出轴为法兰盘设计,有凸缘中心、盘面螺孔、定位、销孔、固定面宽大,可是连接更具坚实平稳。
能适用于较大负荷的回转式圆盘驱动场合,被广泛使用在各类盘式加工机械及类似机构的产业机械,自动化间歇驱动部、驱动圆盘。
超薄平台桌面型【DA】此系列机种的尺寸设计特性与平台桌面型功能相似,于驱动运转上可承受超大轴向负载及垂直径向压力,在输出端有凸起固定盘面及大孔径空心轴,可搭配设置动态、静态自动化周边设备,可将动力源的油、气管路设计于空心孔内,此系列机种广泛应用于重负载、直结自动化设备的各类机型及产业机型等,作同步自动化间歇驱动。
“凸轮分割器”产品广泛应用在制药机械、印刷机械、食品包装机械、玻璃机械、陶瓷机械、烟草机械、机床加工中心等,该产品我公司产品具有定位精度高,高速运转平衡,传递扭矩大等特点。


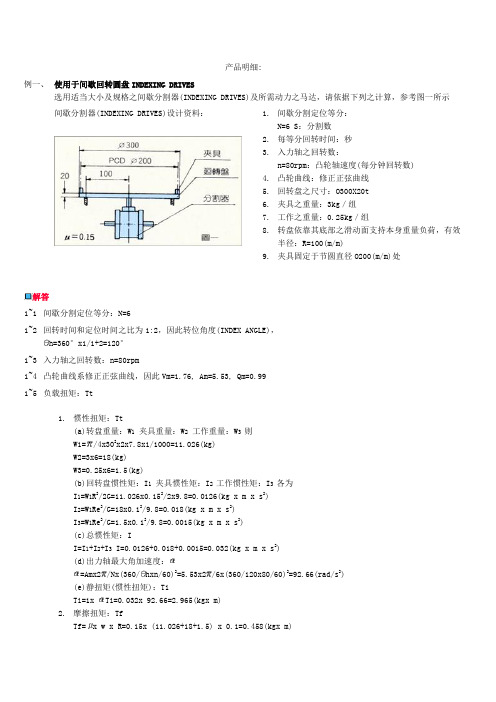
产品明细:例一、使用于间歇回转圆盘INDEXING DRIVES选用适当大小及规格之间歇分割器(INDEXING DRIVES)及所需动力之马达,请依据下列之计算,参考图一所示间歇分割器(INDEXING DRIVES)设计资料:1.间歇分割定位等分:N=6 S:分割数2.每等分回转时间:秒3.入力轴之回转数:n=80rpm:凸轮轴速度(每分钟回转数)4.凸轮曲线:修正正弦曲线5.回转盘之尺寸:O300X20t6.夹具之重量:3kg/组7.工作之重量:0.25kg/组8.转盘依靠其底部之滑动面支持本身重量负荷,有效半径:R=100(m/m)9.夹具固定于节圆直径O200(m/m)处解答1~1 间歇分割定位等分:N=61~2 回转时间和定位时间之比为1:2,因此转位角度(INDEX ANGLE),h=360°x1/1+2=120°1~3 入力轴之回转数:n=80rpm1~4 凸轮曲线系修正正弦曲线,因此Vm=1.76, Am=5.53, Qm=0.991~5 负载扭矩:Tt1.惯性扭矩:Tt(a)转盘重量:W1夹具重量:W2工作重量:W3 则W1=/4x302x2x7.8x1/1000=11.026(kg)W2=3x6=18(kg)W3=0.25x6=1.5(kg)(b)回转盘惯性矩:I1夹具惯性矩:I2 工作惯性矩:I3 各为I1=W1R2/2G=11.026x0.152/2x9.8=0.0126(kg x m x s2)I2=W1Re2/G=18x0.12/9.8=0.018(kg x m x s2)I3=W1Re2/G=1.5x0.12/9.8=0.0015(kg x m x s2)(c)总惯性矩:II=I1+I2+I3 I=0.0126+0.018+0.0015=0.032(kg x m x s2)(d)出力轴最大角加速度:=Amx2/Nx(360/hxn/60)2=5.53x2/6x(360/120x80/60)2=92.66(rad/s2)(e)静扭矩(惯性扭矩):TiTi=1x Ti=0.032x 92.66=2.965(kgx m)2.摩擦扭矩:TfTf=x w x R=0.15x (11.026+18+1.5) x 0.1=0.458(kgx m)3.作功扭矩:Tw在间歇分割时没有作功,因此Tw=04.以上总负载扭矩:TtTt=Ti+Tf+Tw=2.965+0.458+0=3.423(kgx m)1~6 实际负载扭矩:Te 安全负载之因数 fc=1.5Te=Tt x fc=3.423 x 1.5= 5.135(kg x m)1~7 入力轴扭矩:Tc 注:入力轴起动负载扭矩视为0,因此Tca=0Tc=360/hxN x Qm x te + Tca= 360/120x6 x 0.99 x 5.135 =2.54(kg x m)1~8 计算所需之马力:PP=Tcxn/716xn(HP) 或 P= Tcxn/975xn(kw) Thp=Tcxn/716xn(HP) 或 P=Tcxn/975xn假设效率n=60%那么P=2.54x80/716x0.6=0.47(HP) 或 P=2.54x80/975x0.6=0.34(kw)事实上,以上所计算之值为起动时之最大马力,而连续传动所需之马力为1/21~9 选择适用之间歇分割器(INDEXING DRIVES)根据以上所计算之资料以及人力轴之转数80rpm来选择,请参考说明书上所记载,凡是出力轴扭矩高于以上所计算之Te值者均可选用。

分割器选型计算公式English Answer:Separator Selection Calculation Formula.The separator selection calculation formula is used to determine the appropriate size and type of separator for a given application. The formula takes into account factors such as the flow rate, the fluid density, the pressure drop, and the allowable pressure loss.The most common separator selection calculation formula is the Stokes' law, which is given by:d = sqrt(18µ/πρgQ)。
Where:d is the diameter of the separator (in meters)。
µ is the dynamic viscosity of the fluid (in P a·s)。
ρ is the density of the fluid (in kg/m³)。
g is the acceleration due to gravity (in m/s²)。
Q is the flow rate (in m³/s)。
This formula can be used to calculate the minimum size separator required for a given application. However, it is important to note that other factors, such as the pressure drop and the allowable pressure loss, may also need to be considered.Chinese Answer:分离器选型计算公式。
分割器的精度是这样表示分割器的精度单位就是角度秒,可以作为一个单位用,也就是代表了一台分割器的精度指标。
单位符号是“″”,秒在这里就是角度秒的意思。
一个圆周是360°,换算成秒就是1°=3600″,所以是其单位精度是非常高的。
一般普通的分割器的精度是在±30″左右,但是斯炜达现在可以定制做到±15″高精度的分割器,也主要应用高精度组装机,实现间歇分割。
角度秒是代表精度的,分割器的精度有分割精度和重复精度,所以在买分割器时一定要咨询清楚,分割精度就是指分割器转动一个工位的精度,而重复精度就是指转动一圈后回到原点的精度,重复精度的要求就非常的高了分割器”是输入轴上的空间立体凸轮与输出轴分度轮上的从动滚子无间隙啮合形成的机构(其啮合传动方式类似于蜗轮蜗杆传动)。
自动化分度装置——间歇式凸轮分割器选型计算公式自动化分度装置——间歇式凸轮分割器选型计算公式其特点是:凸轮基面为圆弧回转体,从动滚子轴线与输出轴垂直,并与凸轮轴线处在同一平面内。
凸轮廓面的曲线段驱使分度轮转位,直线段使分度轮静止并自锁。
通过该机构将连续的输入回转运动转化为间歇的步进输出运动。
自动化分度装置——间歇式凸轮分割器选型计算公式自动化分度装置——间歇式分割器选型计算公式分割器产品广泛应用在自动组装机,自动装配机,自组送料机,自动组力机,自动加工机,印刷机,移印机,网印机,烫金机,真空成型机,自动化分度装置——间歇式凸轮分割器选型计算公式自动检查机,选别机,电容器一贯机,电容器自动化和分类机,电阻二极管设备,自动打包机,自动化分度装置——间歇式凸轮分割器选型计算公式全自动铅丝焊接及动压机,自动灯丝收卷机,制药机械、印刷机械、食品包装机械、玻璃机械、陶瓷机械、烟草机械、化工机械,电子设备,数控机床加工中心等需要把连续运转转化为步进动作的各种自动化机械上。
目录一:产品介绍与外型选购1.弧面凸轮分割器(1)介绍(2)型式选定参数(3)外形图及尺寸(4)技术参数表2.平行凸轮分割器(1)介绍(2)型式选定参数(3)外形图及尺寸(4)技术参数表3.圆柱凸轮分割器(1)介绍(2)示意外形图4.凸轮及模具制作二:选型范例三:新品推荐。
凸轮间歇机构广泛应用在制药机械、印刷机械、包装机械、玻璃机械、陶瓷机械、烟草机械、机床加工中心、自动送料机等需要把连续运转转化为步进动作的各种自动化机械上。
该产品具有步进定位精度高、高速运转平稳、传递扭矩大、定位时自锁等显著优点,是替代槽轮机构、不完全齿轮机构、棘轮机构等传统间歇机构的最理想产品。
“一:产品介绍与外型选择1、弧面凸轮分割器“弧面凸轮分割器”是输入轴上的空间立体凸轮与输出从动轴上的从动滚子无间隙啮合形成的机构。
其特点是:凸轮基面为圆弧回转体,从动滚子轴线与输出轴垂直,并与凸轮轴线处在同一平面内。
凸轮廓面的曲线段驱使分割盘转位,直线段使分割盘静止并自锁。
通过该机构将连续的输入回转运动转化为间歇的步进输出运动。
该种类型的分割器由于精度高、速度快、扭矩大、体积小等显著特点,广泛应用于各种需要步进驱动的自动组合机,加工机械,金属加工器械,输送机步进驱动,包装机,食品机械,分装设备,医药器械,自动检测机,挤压入料装置,以及在其他工业使用的间歇分割机。
弧面凸轮分割器按照输出轴的输出类型分为:轴式、法兰式、平台桌面式.型式选定需提供如下参数:1.中心距(即输入轴与输出轴间的距离):45、50、63、70、80、83、100、110、125、140、150、160、175、180、200、250、3502.分割数:2、3、4、5、6、8、9、10、12、16、24、32、……3.动程角:90°;120°;180°;240°;270°;300°等4.凸轮旋向:右旋R为标准型、左旋L(见下图)5.曲线类型:(1)MS曲线(优选变正弦曲线,标准)、(2)MT 曲线、(3)MCV曲线、(4)按用户要求曲线。
140DS分割器价格是多少?140DS分割器选型计算方式是什么?在日常生活中,大家都多多少少听说过140DS分割器,那么各位对140DS分割器了解又有多少呢?是不是哪个140DS分割器厂家更靠谱是大家比较关心的问题?憋着急,下面小编来一一问您解答疑惑~~~~140DS分割器价格的一个决定因素是技术的投入,140DS分割器所涵盖的技术从产品的选型、设计、到加工测量每一个环节都体现了工程技术团队加工技术的较好,比如在产品选型的初期,对于产品技术参数的匹配度,就是一个专业技术参数和使用经验的计算过程,因为计算所涉及到的参数较多,分割数、驱动角度、出入力轴的转数、圆盘直径、厚度、材质、夹具重量、工件重量、中心距离等,这些参数即使是专业的工程师计算,也是要经过多次的理论数据与实际加工经验相结合才得出的有效数据,因为,选型意味着产品的匹配度,也决定了产品价格的关键所在。
140DS分割器原理主要的特点是完成升降生产动作,大部分在机械的升降动作中用到,特别是高速的生产动作,140DS分割器的稳定性是其它设备所不及的,同样在这些升降动作需求中,无论从设计还是实际的应用中,所付出的成本同比分割器也是低的。
升降分割器所能实现的是高低工位的运作,或者是加工条件的需求,定向入力分割所实现的升降运动的功能。
摇摆式的运作属于分割器的凸轮分割中所产生往复运动的原理,入力轴的连续旋转,在分割的作用下,出力轴作往复运动,在生产中,这种摇摆式的应用较常用在同一工序的两个加工动作,或两个不同的工序的同一加工动作中,在一些大型机械中,需要达到摇摆需求的部件中也常常被用到,有一些摇摆式的机械动作也习惯使用电机的极位切换的方式,但是,从使用中的稳定性上,还是分割器的优势多些。
140DS分割器有两种主要的操作模式。
一种模式被称为“按需循环”。
它的意思就是,凸轮的输入轴一次循环一圈,分割器的输出轴在分割的作用下输出一个位置。
整个机械运作通常是通过使用凸轮轴传感器来检测凸轮轴位置和VFD来停止及起动电动机来实现。
产品明细:
例一、 使用于间歇回转圆盘INDEXING DRIVES
选用适当大小及规格之间歇分割器(INDEXING DRIVES)及所需动力之马达,请依据下列之计算,参考图一所示
间歇分割器(INDEXING DRIVES)设计资料:
1.间歇分割定位等分:
N=6 S:分割数
2.每等分回转时间:秒
3.入力轴之回转数:
n=80rpm:凸轮轴速度(每分钟回转数)
4.凸轮曲线:修正正弦曲线
5.回转盘之尺寸:O300X20t
6.夹具之重量:3kg/组
7.工作之重量:0.25kg/组
8.转盘依靠其底部之滑动面支持本身重量负荷,有效
半径:R=100(m/m)
9.夹具固定于节圆直径O200(m/m)处
解答
1~1 间歇分割定位等分:N=6
1~2 回转时间和定位时间之比为1:2,因此转位角度(INDEX ANGLE),
h=360°x1/1+2=120°
1~3 入力轴之回转数:n=80rpm
1~4 凸轮曲线系修正正弦曲线,因此Vm=1.76, Am=5.53, Qm=0.99
1~5 负载扭矩:Tt
1.惯性扭矩:Tt
(a)转盘重量:W1 夹具重量:W2 工作重量:W3 则
W1=/4x302x2x7.8x1/1000=11.026(kg)
W2=3x6=18(kg)
W3=0.25x6=1.5(kg)
(b)回转盘惯性矩:I1 夹具惯性矩:I2 工作惯性矩:I3 各为
I1=W1R2/2G=11.026x0.152/2x9.8=0.0126(kg x m x s2)
I2=W1Re2/G=18x0.12/9.8=0.018(kg x m x s2)
I3=W1Re2/G=1.5x0.12/9.8=0.0015(kg x m x s2)
(c)总惯性矩:I
I=I1+I2+I3 I=0.0126+0.018+0.0015=0.032(kg x m x s2)
(d)出力轴最大角加速度:
=Amx2/Nx(360/hxn/60)2=5.53x2/6x(360/120x80/60)2=92.66(rad/s2)
(e)静扭矩(惯性扭矩):Ti
Ti=1x Ti=0.032x 92.66=2.965(kgx m)
2.摩擦扭矩:Tf
Tf=x w x R=0.15x (11.026+18+1.5) x 0.1=0.458(kgx m)
3.作功扭矩:Tw
在间歇分割时没有作功,因此Tw=0
4.以上总负载扭矩:Tt
Tt=Ti+Tf+Tw=2.965+0.458+0=3.423(kgx m)
1~6 实际负载扭矩:Te 安全负载之因数 fc=1.5
Te=Tt x fc=3.423 x 1.5= 5.135(kg x m)
1~7 入力轴扭矩:Tc 注:入力轴起动负载扭矩视为0,因此Tca=0
Tc=360/hxN x Qm x te + Tca= 360/120x6 x 0.99 x 5.135 =2.54(kg x m)
1~8 计算所需之马力:P
P=Tcxn/716xn(HP) 或 P= Tcxn/975xn(kw) Thp=Tcxn/716xn(HP) 或 P=Tcxn/975xn
假设效率n=60%那么
P=2.54x80/716x0.6=0.47(HP) 或 P=2.54x80/975x0.6=0.34(kw)
事实上,以上所计算之值为起动时之最大马力,而连续传动所需之马力为1/2
1~9 选择适用之间歇分割器(INDEXING DRIVES)
根据以上所计算之资料以及人力轴之转数80rpm来选择,请参考说明书上所记载,凡是出力轴扭矩高于以上所计算之Te值者均可选用。
Vm:最大非向性速度
Am:最大非向性之加速度
Qm:凸轮轴最大扭力系数
:角加速度
h:入力轴转位(驱动)角度
:摩擦系数
:速度比
:角速度(弧度/秒)
:角加速度(弧度/秒2)。