第二章平面机构的运动分析
- 格式:doc
- 大小:448.50 KB
- 文档页数:2
1、试求出下列机构中的所有速度瞬心。
(a) (b)
(c) (d)
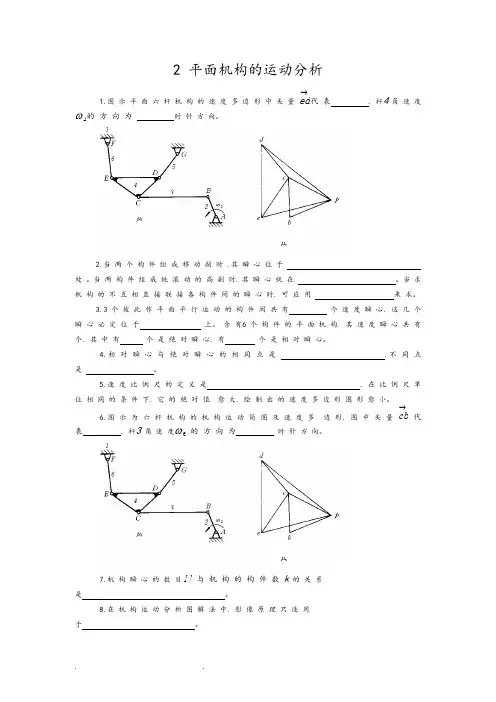
2、图示的凸轮机构中,凸轮的角速度ω1=10s-1,R=50mm,l A0=20mm,试求当φ=0°、45°及90°时,构件2的速度v。
题2图凸轮机构题3图组合机构
3、图示机构,由曲柄1、连杆2、摇杆3及机架6组成铰链四杆机构,轮1′与曲柄1
固接,其轴心为B,轮4分别与轮1′和轮5相切,轮5活套于轴D上。
各相切轮之间作纯滚动。
试用速度瞬心法确定曲柄1与轮5的角速比ω1/ω5。
4、在图示的颚式破碎机中,已知:x D=260mm,y D=480mm,x G=400mm,y G=200mm,l AB=l CE=100mm,l BC=l BE=500mm,l CD=300mm,l EF=400mm,l GF=685mm,ϕ1=45°,ω1=30rad/s逆时针。
求ω
5、ε5。
题4图破碎机题5图曲柄摇块机构
5、图示的曲柄摇块机构, l AB=30mm,l AC=100mm,l BD=50mm,l DE=40mm,ϕ1=45°,等角速度ω1=10rad/s,求点E、D的速度和加速度,构件3的角速度和角加速度。
6、图示正弦机构,曲柄1长度l1=,角速度ω1=20rad/s(常数),试分别用图解法和解析法确定该机构在ϕ1=45°时导杆3的速度v3与加速度a3。
题6图正弦机构题7图六杆机构
7、在图示机构中,已知l AE=70mm,l AB=40mm,l EF=70mm,l DE=35mm,l CD=75mm,l BC=50mm,ϕ1=60°,构件1以等角速度ω1=10rad/s逆时针方向转动,试求点C的速度和加速度。