平面机构的运动分析答案
- 格式:doc
- 大小:247.00 KB
- 文档页数:7
1.速度瞬心是两刚体上瞬时速度相等的重合点。
2.若瞬心的绝对速度为零,则该瞬心称为绝对瞬心;
若瞬心的绝对速度不为零,则该瞬心称为相对瞬心。
3.当两个构件组成移动副时,其瞬心位于垂直于导路方向的无穷远处。
当两构件组成高副时,两个高副元素作纯滚动,则其瞬心就在接触点处;若两个高副元素间有相对滑动时,则其瞬心在过接触点两高副元素的公法线上。
4.当求机构的不互相直接联接各构件间的瞬心时,可应用三心定理来求。
5.3个彼此作平面平行运动的构件间共有 3 个速度瞬心,这几个瞬心必定位于一条直线上。
6.机构瞬心的数目K与机构的构件数N的关系是K=N(N-1)/2 。
7.铰链四杆机构共有 6 个速度瞬心,其中 3 个是绝对瞬心。
8.速度比例尺μ
ν
表示图上每单位长度所代表的速度大小,单位为: (m/s)/mm 。
加速度比例尺μa表示图上每单位长度所代表的加速度大小,单位为 (m/s2)/mm。
9.速度影像的相似原理只能应用于构件,而不能应用于整个机构。
10.在摆动导杆机构中,当导杆和滑块的相对运动为平动,牵连运动为转动时(以上两空格填转动或平动),两构件的重合点之间将有哥氏加速度。
哥氏加速度的大小为2×相对速度×牵连角速度;方向为相对速度沿牵连角速度的方向转过90°之后的方向。
二、试求出图示各机构在图示位置时全部瞬心的位置(用符号
ij
P直接标注在图上)。
P
24)
12
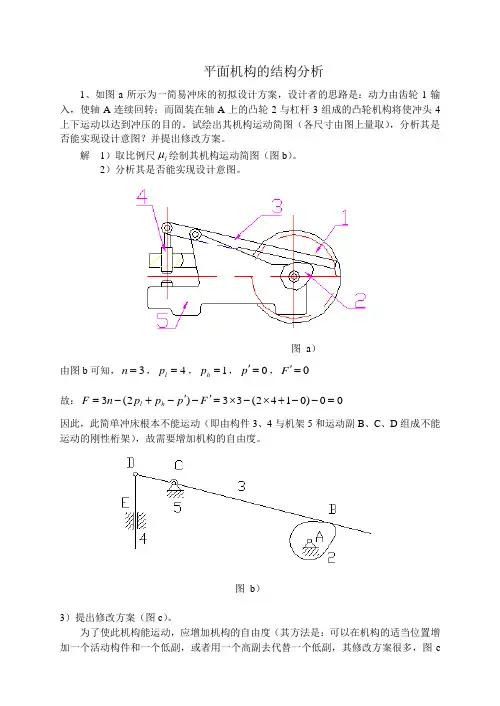
三、 在图a 所示的四杆机构中,
l AB =60mm,l CD =90mm ,l AD =l BC =120mm ,ω2=10rad/s ,试用瞬心法求:
1)当φ=165°时,点C 的速度v C ; 2)当φ=165°时,构件3的BC 线上速度最小的一点E 的位置及速度的大小;
3)当v C =0时,φ角之值(有两个解); 解:1)以选定的比例尺μl 作机构运动简图(图b )。
2)求v C ,定出瞬心P 13的位置(图b )
a )
(P 13)
P
P 23→∞
v C =ω33413P P μl =
34132313B
l l
v P P P P μμg g
g =1060583833
⨯⨯⨯⨯≈×174=418(mm/s)
3)定出构件3的BC 线上 速度最小的点E 的位置:
E 点位置如图所示。
v E =ω313EP μl ≈×52×3 =374(mm/s)
4)定出v C =0时机构的两个位置(作于图c ),量出:
φ1≈45° φ2≈27°
想一想:
1.要用瞬心法求解某构件(如构件3)上点的速度,首先需要定出该构件的何种瞬心
2.构件(如构件3)上某点的速度为零,则该点一定就是它的什么瞬心
四、 在图示摆动导杆机构中,∠BAC =90°,L AB =60mm ,L AC =120mm ,曲柄AB 以等角速度ω1=30rad/s 转动。
请按照尺寸按比例重新绘制机构运动简图,试用相对运动图解法求构件3的角速度和角加速度。
解:取长度比例尺mm m l /001.0=μ作机构运动简图 v B2=ω1•l AB =30•60=1800mm/s=1.8m/s
a B2=ω12
AB =3022 3232B B B B v v v =+v v v BC ⊥AB ∥BC
B 1
C 2(P 13)
13
大小: ω1l AB ω1≈6rad/s ,顺时针
3323232n t k r B B B B B B B a a a a a +=++v v v v v
方向:B →C ⊥BC B →A ⊥CB //CB
大小:ω32l BC ω12l AB 2ω2v B3B2 =V μmm s m //
32k B B a v
'p
α1≈210rad/s 2
,逆时针 (注:ω1和α1计算过程略)
五、 图示的各机构中,设已知各构件的尺寸,原动件1以等角速度ω1顺时针方向转动。
试用图解法求机构在图示位置时构件3上C 点的速度及加速度(列出相对运动图解法矢量公式,进行大小、方向分析,最后将下面的速度矢量图和加速度矢量图补充完整。
) 上图中,AB CD BC l l l 2==
C B CB v v v =+v v v n t n t
C C B CB CB a a a a a +=++v v v v v
方向:⊥CD ⊥AB ⊥BC 方向:C →D ⊥CD B →A C →B ⊥CB 大小: ω1l AB 大小:ωCD 2l CD ω12l AB ωCB 2l CB
有:v C
=0,ω3
=0,ω2
=ω
1
a C
= a C
t
= a B
=ω
1 2 l AB
b 3
b 2
b 3’
b
33232C B C B C C C v v v v v
=+=+v v v v v
方向: ⊥AB ⊥BC ∥BC 大小: ω1l AB 0
33323232n t k r C B C B C B C C C C C a a a a a a a =++=++v v v v v
方向: B →A C
→B ⊥CB ∥BC 大小: ω12l AB ω32l CB 0 2ω3v C3C2=0
有:v
C3
=ω1l AB a C3=0
六、已知:在图示机构中,l AB =l BC =l CD =l ,且构件1以ω1匀速转动。
AB 、BC 处于水平位置CD⊥BC,试用相对运动图解法求ω3,α3 (μv 和μa 可任意选择)。
解: 属于两构件间重合点的问题
思路:因已知B 2点的运动,故通过B 2点求B 3点的运动。
1)速度分析
3232B B B B v v v =+v v v
方向:⊥BD ⊥AB ∥CD 大小: ω12l
在速度多边形中,∵b 3与极点p 重合,∴v B3=0
且ω3=v B3/ l BD =0,由于构件2与构件3套在一起,∴ω2=ω3=0
2)加速度分析
33
323232n t n k r B B B B B B B B a a a a a a =+=++v v v v v v 方向: ⊥BD B →A ∥CD 大小: 0 ω12l 0
在加速度多边形中,矢量'
3b πuuu v 代表3t B a v
则有:223
31t
B BD a l αω=== 将矢量'
3b πuuu v
移至B 3点,可见为α3逆时针。
七、已知铰链四杆机构的位置、速度多边形和加速度多边形如下图所示。
试求: ①构件1、2和3上速度均为X v 的点X 1、X 2和X 3的位置; ②构件2上加速度为零的点Q 位置,并求出该点的速度Q v ; ③构件2上速度为零的点H 位置,并求出该点的加速度H a ;
(各速度矢量和加速度矢量的大小任意,但方向必须与此答案相同)
b ´
c。