机械原理:平面机构运动分析解析法
- 格式:ppt
- 大小:3.03 MB
- 文档页数:104
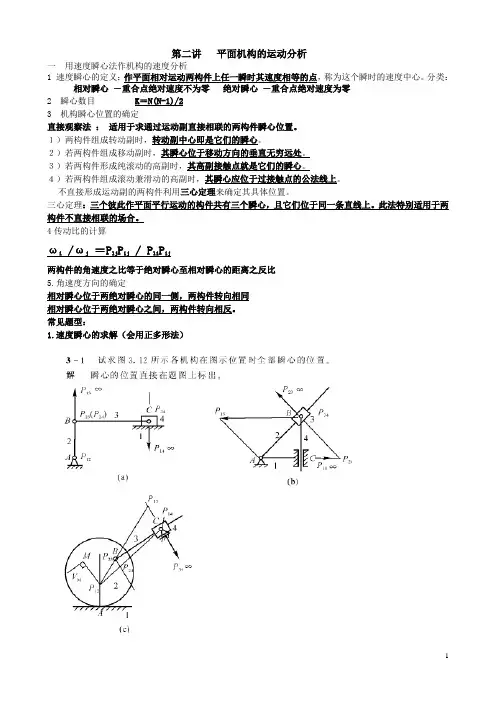
第二讲平面机构的运动分析一用速度瞬心法作机构的速度分析1 速度瞬心的定义:作平面相对运动两构件上任一瞬时其速度相等的点,称为这个瞬时的速度中心。
分类:相对瞬心-重合点绝对速度不为零绝对瞬心-重合点绝对速度为零2 瞬心数目 K=N(N-1)/23 机构瞬心位置的确定直接观察法:适用于求通过运动副直接相联的两构件瞬心位置。
1)两构件组成转动副时,转动副中心即是它们的瞬心。
2)若两构件组成移动副时,其瞬心位于移动方向的垂直无穷远处。
3)若两构件形成纯滚动的高副时,其高副接触点就是它们的瞬心。
4)若两构件组成滚动兼滑动的高副时,其瞬心应位于过接触点的公法线上。
不直接形成运动副的两构件利用三心定理来确定其具体位置。
三心定理:三个彼此作平面平行运动的构件共有三个瞬心,且它们位于同一条直线上。
此法特别适用于两构件不直接相联的场合。
4传动比的计算ωi /ωj=P1j P ij / P1i P ij两构件的角速度之比等于绝对瞬心至相对瞬心的距离之反比5.角速度方向的确定相对瞬心位于两绝对瞬心的同一侧,两构件转向相同相对瞬心位于两绝对瞬心之间,两构件转向相反。
常见题型:1.速度瞬心的求解(会用正多形法)2利用速度瞬心求解速度。
ωi /ωj =P 1j P ij / P 1i P ij例题:在图示四杆机构中,AB l =60mm ,CD l =90mm ,AD l =BC l =120mm ,2ω=10rad/s ,试用瞬心法求: (1)当ϕ=45°时,点C 的速度C v;(2)当ϕ=165°时,构件3的BC 线上(或其延长线上)速度最小的一点E 的位置及其速度大小;(3)当C v =0时,ϕ角之值(有两个解)。
P 13C(a)解:以选定的比例尺0.005/l m mm μ=作机构运动简图如图3-2所示。
(1)定瞬心P 13的位置,求v c 。
131331 6.07rad /AP DP l l s ωω==30.547/c l v CD m s μω==(2)如图(b )所示,定出构件2的BC 线上速度最小的一点E 位置及速度的大小。


平面机构的运动分析平面机构是由若干个连杆组成的机械结构,在运动分析中,我们需要研究机构中各个连杆的运动规律,以及机构整体的运动情况。
平面机构常见的类型有四杆机构、曲柄滑块机构、双曲柄滑块机构等。
在运动分析中,我们通常要确定机构的约束条件、求解连杆的角度、速度和加速度等。
首先,我们需要确定机构的约束条件。
约束条件是指机构中各个连杆之间的几何关系,包括定位约束和连杆长度约束。
定位约束是指机构中一些点的位置关系,可以通过坐标方程等方法求解。
连杆长度约束是指连杆的长度是固定的,可以通过连杆长度的几何关系来确定。
然后,我们可以通过运动分析的方法来求解连杆的角度、速度和加速度等。
在运动分析中,可以使用几何法和代数法等不同的方法来求解。
几何法中常用的方法有图解法和模型法。
图解法是通过绘制连杆的运动图来解决问题,可以直观地表示出机构的运动情况。
模型法是将机构模型化为几何图形,然后通过几何关系求解。
这些方法通常适用于简单的机构。
代数法中常用的方法有位置矩阵法和速度矩阵法。
位置矩阵法是通过建立连杆的位移方程来求解连杆的角度。
速度矩阵法是通过建立速度传递关系求解连杆的速度和加速度。
此外,还可以通过数值模拟的方法来进行运动分析。
数值模拟是利用计算机软件对机构进行建模,并进行数值计算得到机构的运动参数。
这种方法可以应用于复杂的机构,但计算量比较大。
总之,平面机构的运动分析是解决机构运动问题的基础,通过确定约束条件和求解连杆的角度、速度和加速度等参数,可以研究机构的运动规律,为机构的设计和优化提供理论依据。

机械原理平面机构的运动分析机械原理是研究机械结构的运动、力学性能和设计规律的一门学科。
而平面机构是机械原理中的一个重要概念,指的是在同一平面内运动的机构。
平面机构广泛应用于工程领域,例如各种机床、汽车、船舶等。
对平面机构的运动分析,可以帮助我们理解机构的运动性能以及设计出更加高效的机构。
平面机构的运动分析通常包括以下几个方面:1.机构的自由度和约束度分析:机构的自由度指的是机构在运动中能够独立自由变动的数量,约束度指的是机构在运动中受限制的数量。
自由度和约束度的分析可以帮助我们确定机构的运动特性和受力情况,从而进行更加准确的运动分析。
2.运动学分析:运动学分析是研究机构在运动中各个点的速度和加速度分布的过程。
通过运动学分析,可以确定机构在运动中的速度和加速度的大小和方向,进而计算出关键部位的动力学参数,如惯性力、跟随误差等。
3.强度和刚度分析:机构在运动过程中会受到一定的力学载荷,为了确保机构的正常工作和安全性,需要对机构的强度和刚度进行分析。
强度分析可以帮助我们确定机构的承载能力和应力状态,而刚度分析可以帮助我们确定机构的变形情况和运动精度。
4.动力学分析:动力学分析是研究机构在运动中产生的动力学特性的过程。
通过动力学分析,可以确定机构在运动中的力学响应和响应频率,进而验证机构的设计是否符合运动要求和预期的性能。
对于平面机构的运动分析,需要掌握以下基本方法和步骤:1.给定机构的几何结构和运动要求,确定机构的自由度和约束度。
2.建立机构的运动学模型,包括机构的运动副和约束副。
3.分析机构的运动学闭链,通过运动副和约束副的条件,建立运动学方程组,进而求解各个点的速度和加速度。
4.根据机构的几何结构和质量分布,建立机构的动力学模型,包括质点的质量和惯量矩阵。
5.根据运动学方程组和动力学模型,得到机构的动力学方程组,进而求解力学响应和响应频率。
6.对机构的强度和刚度进行分析,确定机构的设计是否满足要求。
机械原理——平面机构的运动分析第3章平面机构的运动分析3-1 机构运动分析的目的和方法3-2 速度瞬心法求机构速度3-3 矢量方程图解法求速度、加速度3-4 综合法进行速度分析3-5 解析法求运动分析基本要求: 理解速度瞬心的概念、数目和位置的确定方法熟练掌握速度瞬心法在机构速度分析中的应用熟练掌握矢量方程图解法进行运动分析掌握用解析法对机构进行运动分析机械原理——平面机构的运动分析任务、方法一、机构运动分析的任务已知:原动件的运动规律和机构运动尺寸确定:⑴各构件的位置、角位移、角速度、角加速度;⑵构件上某些点的轨迹、位移、速度、加速度二、机构运动分析的方法图解法: 速度瞬心法、矢量方程图解法解析法:矢量法、复数法矩阵法、基本杆组法机械原理——平面机构的运动分析3-2 速度瞬心法求机构速度一、速度瞬心的概念二、机构的瞬心数目三、瞬心位置的确定四、用速度瞬心进行机构的速度分析机械原理——平面机构的运动分析一、速度瞬心Instant Center 《理论力学》:当任一刚体相对于另一刚体作平面运动时,在任一瞬时,都可2 以认为它们是绕某一点作相对转动,该点称为瞬时相对回转中心。
υA2A1AA1瞬时相对回转中心的位置P12 2B 2B 1υ B2B1既然P12是瞬时相对回转中心则该瞬时两构件在P12的相对速度为零,或者说绝对速度相等所以P12为两构件该瞬时的等速重合点P12 速度瞬心:两构件瞬时等速重合点相对速度为零,绝对速度相等 1 瞬心:相对瞬心、绝对瞬心瞬心:机械原理——平面机构的运动分析三、瞬心位置的确定1 由瞬心定义确定通过运动副直接相联的构件——显瞬心n P12 ∞ P12 P12 C P23 纯滚2 滚+动滑P12 B 3 P12 1 P12机械原理——平面机构的运动分析瞬心位置的确定2 借助三心定理确定不通过运动副直接相联的构件——隐含的瞬心三心定理:三个相互作平面运动的构件有三个瞬心,且在一条直线上。