用解析法进行机构的运动分析资料
- 格式:ppt
- 大小:864.00 KB
- 文档页数:31

机械原理_瞬心法解析法机构运动分析瞬心法和解析法是机构运动分析中常用的两种方法。
瞬心法通过分析机构中各个零件的位置和速度,来确定机构的运动学性质。
解析法则通过解析机构的运动方程,得到机构的运动规律。
下面将详细介绍这两种方法并进行比较。
瞬心法是一种基于几何关系的方法,通过寻找机构中每个零件的瞬时转动中心,来确定机构的运动学性质。
瞬心是一个虚拟的点,表示零件在每一瞬时的转动中心。
具体的步骤如下:1.找到机构中的每个可动零件,并确定它们之间的连接关系。
2.将机构定位到其中一时刻,确定每个零件的位置和方向。
3.通过观察每个零件的几何关系,找到这个零件的瞬时转动中心。
4.重复步骤2和3,直到得到整个机构在一个周期内的瞬时转动中心。
5.根据瞬时转动中心的运动轨迹,分析机构的运动学性质。
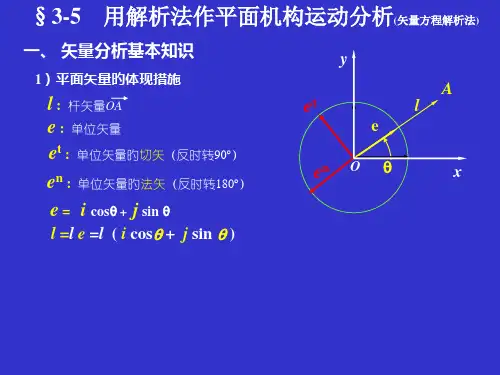
解析法是一种基于运动方程的方法,通过解析机构的运动方程,来得到机构的运动规律。
具体的步骤如下:1.根据机构的几何形状和运动特点,建立机构的运动方程。
2.利用运动方程,解析得到机构的位置和速度的表达式。
3.分析机构的运动学性质,如速度、加速度等。
4.根据运动方程,得到机构的运动规律。
瞬心法和解析法的主要区别在于求解的方式不同。
瞬心法是通过观察几何关系,寻找零件的瞬时转动中心,从而确定机构的运动性质;而解析法则是通过建立和解析机构的运动方程,得到机构的位置、速度等表达式,从而确定机构的运动规律。
瞬心法的优点是简单直观,通过观察几何关系能够快速确定机构的运动性质。
它适用于对于机构零件的位置和速度感兴趣的情况。
另外,瞬心法也适用于对于机构的部分运动情况进行分析的情况。
解析法的优点是能够得到机构的运动规律的具体数学表达式,进一步分析机构的运动性质。
它适用于需要对机构的整个运动过程进行深入分析的情况,或者对机构的动力学特性感兴趣的情况。
虽然瞬心法和解析法有各自的优点和适用范围,但在实际应用中,常常结合使用。
比如,可以先通过瞬心法快速确定机构的运动特征,然后再用解析法进一步分析和求解,得到更详细的运动规律。