第3章 平面连杆机构的运动分析解剖
- 格式:ppt
- 大小:1.54 MB
- 文档页数:8



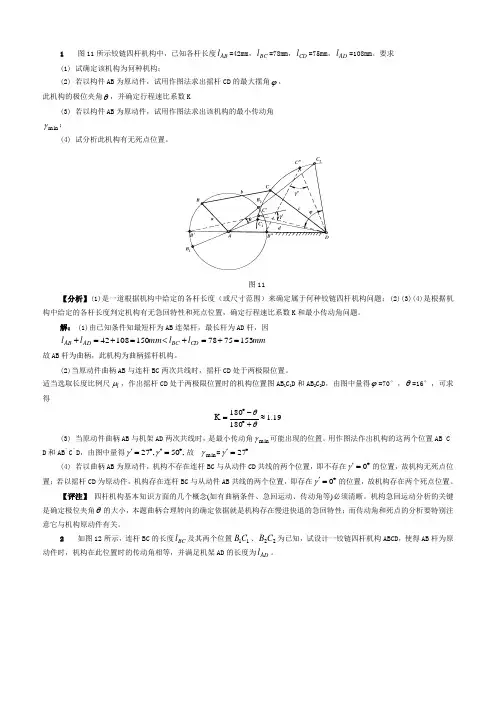
1图11所示铰链四杆机构中,已知各杆长度AB l =42mm ,BC l =78mm ,CD l =75mm ,AD l =108mm 。
要求(1) 试确定该机构为何种机构;(2) 若以构件AB 为原动件,试用作图法求出摇杆CD 的最大摆角ϕ, 此机构的极位夹角θ,并确定行程速比系数K(3) 若以构件AB 为原动件,试用作图法求出该机构的最小传动角min γ;(4) 试分析此机构有无死点位置。
图11【分析】(1)是一道根据机构中给定的各杆长度(或尺寸范围)来确定属于何种铰链四杆机构问题;(2)(3)(4)是根据机构中给定的各杆长度判定机构有无急回特性和死点位置,确定行程速比系数K 和最小传动角问题。
解: (1)由已知条件知最短杆为AB 连架杆,最长杆为AD 杆,因mm l l mm l l CD BC AD AB 153757815010842=+=+<=+=+故AB 杆为曲柄,此机构为曲柄摇杆机构。
(2)当原动件曲柄AB 与连杆BC 两次共线时,摇杆CD 处于两极限位置。
适当选取长度比例尺l μ,作出摇杆CD 处于两极限位置时的机构位置图AB 1C 1D 和AB 2C 2D ,由图中量得ϕ=70°,θ=16°,可求得19.1180180≈+︒-︒=K θθ(3) 当原动件曲柄AB 与机架AD 两次共线时,是最小传动角min γ可能出现的位置。
用作图法作出机构的这两个位置AB ′C′D 和AB ″C ″D ,由图中量得,50,27︒=''︒='γγ故 min γ=︒='27γ(4) 若以曲柄AB 为原动件,机构不存在连杆BC 与从动件CD 共线的两个位置,即不存在︒='0γ的位置,故机构无死点位置;若以摇杆CD 为原动件,机构存在连杆BC 与从动件AB 共线的两个位置,即存在︒='0γ的位置,故机构存在两个死点位置。
【评注】 四杆机构基本知识方面的几个概念(如有曲柄条件、急回运动、传动角等)必须清晰。