六自由度飞行动力学
- 格式:doc
- 大小:64.00 KB
- 文档页数:1

六旋翼飞行器飞行原理
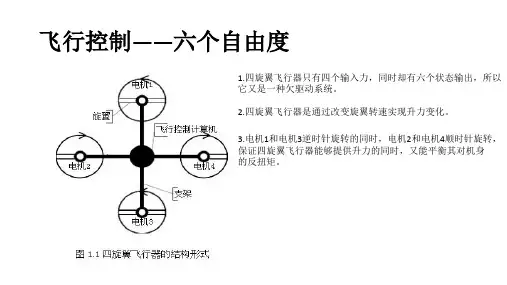
六旋翼飞行器是一种六自由度垂直起降飞行器,相邻的两个旋翼一个顺时针转动,另一个逆时针转动,相邻两个桨一个为正桨,而另外一个为反桨。
这种设计使得飞行器自身扭矩相互抵消,从而保持飞行器的稳定。
在飞行过程中,当6个桨的升力之和等于飞行器的起飞重量时,飞行器保持悬停状态。
如果桨的升力大于飞行器本身的起飞重量,飞行器就会起飞;反之,飞行器就会下降。
通过调整飞行器6个旋翼的转速,可以实现偏航和转换飞行器姿态的目的。
以上内容仅供参考,如需更多信息,建议查阅六旋翼飞行器相关文献或咨询专业技术人员。
飞机设计的基础:六自由度非线性运动方程的建立过程飞机飞行,涉及到力(力矩)平衡、静稳定和静操纵性等一系列的问题。
为了保证飞机的飞行安全和良好的飞行品质,还必须在静品质基础上研究飞机的动态特性。
可以说,飞机的各个系统设计都是围绕着飞机的飞行运动这一基本概念进行的,无论是总体设计、结构设计、气动设计、控制系统设计等等。
今天我们来简单介绍一下飞机运动方程建立的基本思路。
飞行中的歼-20从动力学观点来看,动态特性是研究飞机在外力或外力矩(外界扰动或飞行员操纵)作用下,各个运动参数随时间的变化规律,也就是求解飞机的运动方程,并在此基础上,对动态特性作进一步定量分析。
对于在三维空间运动的刚体飞机,具有6个自由度。
也就是说,如果要完整地描述飞机的运动,需要6个相互独立的微分方程组。
如果再加上空间位置和姿态,完整表征飞机的各个运动参数则需要15个微分方程。
对飞机运动进行受力分析可知,飞机运动要受到重力、发动机推力、空气动力以及三个轴向的滚转力矩作用。
这些力、力矩和运动参数的定义,不在同一坐标系下,因此求解时还需要经过坐标系转换变换到同一坐标系。
六自由度微分方程组加上复杂的坐标系变换,注定了飞机运动方程是复杂的。
飞行中的无人机不过,飞机运动方程能够真实地反映运动过程每一瞬间的情况,是对飞行性能、控制律设计以及运动仿真最基本的依据。
因此,有必要明白运动方程建立的基本方法和具体表现形式。
但是,现代控制理论主要是以传递函数和矩阵形式的状态方程作为分析对象进行研究和设计的。
因此,为了分析飞机稳定性、操纵性、控制律设计的方便,有必要研究建立飞机现行矩阵运动模型的方法。
垂直起降的F-35战机飞机的运动是一个复杂的动力学问题。
如果要全面考虑地球的曲率、燃油的消耗、武器的投射,飞机内部动力系统和操纵系统等机件的相对运动及飞机本身的弹性变形,外力使飞机外形、飞行姿态和运动参数变化等因素,会使飞机运动方程的推导变得极为复杂,并且很难进行解析处理。

民用飞机单发失效时仿真研究摘要:通过对六自由度运动方程进行仿真计算,研究了飞机非对称动力时的操稳特性,并总结了其飞行品质的验证方法。
仿真结果表明该方法的有效性,并具有一定的工程设计指导作用。
关键词:非对称动力;六自由度0 引言对于双发动机民用飞机,当其中一台发动机发生故障时,必然存在左右不平衡推力,造成不平衡力矩,飞机会产生侧滑角及滚转角并降低飞行高度。
此时需要偏转方向舵及副翼平衡不对称推力产生的横航向力矩,并保持飞机继续安全飞行。
目前,单台发动机的失效概率为1×10-5/飞行小时,相对于客机失事概率1×10-9/飞行小时要大得多。
因此,当客机发生动力的非对称损失时,要采取相应的补偿措施,保证其有效的操纵和安全飞行。
因此,有必要根据相关的飞行品质规范,对多发动机飞机的非对称动力的操稳特性进行深入研究。
本文以某典型的双发民用飞机为研究对象,依据运输类飞机适航标准,并结合空气动力学、理论力学及飞行力学等相关原理,确定仿真方法,并计算分析了单发失效时飞机相关的飞行品质,并验证该仿真方法的有效性。
1 非对称动力状态时飞行器飞行动力学模型建立非对称动力飞行指多发动机飞机一侧发动机发生故障,造成推力左右不对称时的飞行。
此时,要求飞机应能做定常直线飞行。
(1)飞行器动力学方程。
利用理论力学的动量定理可知,飞行器质心运动在任意动坐标系Oxyz上投影得质心动力学标量方程组为:m(+wq-vr)=F xm(+ur-wp)=F ym(+vp-uq=F z(1)根据理论力学中质点系的动量距定理知,dhdt=∑M(2)其中:h为质心系对所选择点的动量距;∑M 为合外力矩。
假设各坐标轴角速度的分量为ωX、ωY、ωZ,质量为d m的质心绕3个坐标轴的动量矩为:dh x=ωx(y2+z2)dm-ωyxydm-ωzzxdm dh y=ωy(z2+x2)dm-ωzzxdm-ωxxydmdh z=ωz(x2+y2)dm-ωxzxdm-ωyyzdm(3)引入惯性矩和惯性积,并对上式进行积分得,h x=ωxI x-ωyI xy-ωzI xzh y=ωyI y-ωzI yz-ωxI xyh z=ωzI z-ωxI xz-ωyI yz(4)对于飞机而言,xoz平面为对称面,因而I xy和I yz为零,所以得到转动动力学方程为:L=I x+(I z-I y)qrM=I y+(I x-I z)rpN=I z+(I y-I x)pq(5)(2)飞机运动学方程。

42212312222212''22'212[()()][][()()][()()()()()()()]()sin ()[r r c c qq rr pr u vrc wq c uu c vv c ww c uw c c uvc c c rm u v v r w w q L X q X r X pr L X u X v v r X w w q L X u u X v v X w w X u u w w X u u v v W B L u u X X δδδρρρθρδ'''--+-=++'''++-+-'''+-+-+-+--+----+-+'2]s s spropT δδ+(1)○2 横向运动方程4'1||2312||2212[()()][][()()()()||][()()()c c r p pqqr r r p p v ur c vq c wp cwr c v r uu c uv c c v m v u u r w w p L Y r Y p Y p p Y pq Y qr Y r r L Y v Y u u r Y v v q Y w w p Y w w r Y r L Y u u Y u u v v Y ρρρ+---='''''+++++'''''++-+-+-+-'+'''+-+--+()||2212()()(cos sin ()w c c v v c r c r v v w w Y v v W B L Y u u δθϕρδ--'+-'+-+-(2)4221||2312||2221[()()][][()()()||][()()()()()c c q pp rr rp q q w uq c vr c vp c w q uu c vv c uv c c uwc m w u u q v v p L Z q Z p Z r Z rp Z q q L Z w Z u u q Z v v r Z v v p Z q L Z u u Z v v Z u u v v Z u u ρρρ'''''--+-=++++''''++-+-+-'+'''+-+-+--'+-()||2212()()()(()cos cos ()c c c u w ww c wwc s c s w w Z u u w w Z w w Z w w W B L Z u u δθϕρδ'-+--'+-'+-'+-+-(3)○4 横倾运动方程 51||||24123321||()[][()()()()()()][()()()(x z y p r p p qrpq r r v up c ur c vq c wpc wr c vvv c uu c uv c c v v I p I I qr L K p K r K p p K qr K pq K r r L K v K u u p K u u r K v v q K w w p K w w r K v v L K u u K u u v v K v v ρρρ+-=''''''+++++''''++-+-+-'''+-+-+-''+-+--'+-3212()()]()cos cos ()cos sin ()c vwc c G B G B r c r K v v w w y W y B z W z B L K u u δθϕθϕρδ'+--'+---+-(4)5221||2412||32212()[][()()()][()()()()()()Y X Z q pp q q rr pr w uq c vr c vp c w uu c vv c uv c c uwc c u w I q I I pr L M q M p M q q M r M pr L M w M u u q M v v r M v v p M L M u u M v v M u u v v M u u w w M ρρρ'''''+-=++++''''++-+-+-'+'''+-+-+--''+--+||321()()()(()cos cos ()sin ()c c wwc ww c G B G B s c s u u w w M w w M w w x W x B z W z B L M u u δθϕθρδ--'+-'+-'----+-(5)○6 偏航运动方程 51||||2412||3212()[][()()()()()][()()()z y X r p p p r r pq qrv upc ur c wr c wpc vq c v r uuc uv c c I r I I pq L N r N p N p p N r r N pq N qr L N v N u u p N u u r N w w r N w w p N v v q N L N u u N u u v v ρρρ''''''+-=+++++''''++-+-+-''+-+-'+''+-+--+||3212()()(()cos sin ()sin ()vw c c v v c G B G B r c rN v v w w N v v x W x B y W y B L N u u δθϕθρδ'--'+-'+-+-+-(6)○7 姿态方程: sin tan cos tan cos sin sin /cos cos /cos p q r q r q r ϕϕθϕθθϕϕψϕθϕθ=++=-=+○8 运动关系式:cos cos (cos sin sin sin cos )(cos sin cos sin sin )sin cos (sin sin sin cos cos )(sin sin cos cos sin )sin cos sin cos cos u v w u v w u v w ξψθψθϕψϕψθϕψϕηψθψθϕψϕψθϕψϕςθθϕθϕ=+-++=+++-=-++ 式中:下标为prop 的项为推进器产生的推力;)('∙X 、)('∙Y 、)('∙Z -----无因次水动力导数; )('∙K 、)('∙M 、)('∙N -----无因次水动力矩导数;u-----航速(m/s); v-----横荡速度(m/s); w-----垂荡速度(m/s); p-----横摇角速度(rad/s); q-----纵摇角速度(rad/s); r-----艏摇角速度(rad/s);r δ-----方向舵舵角(rad); s δ-----水平舵舵角(rad);m-----质量(Kg);x I -----绕x 轴的转动惯量(N.m2); y I -----绕y 轴的转动惯量(N.m2); z I -----绕z 轴的转动惯量(N.m2);,,c c c u v w 分别表示海流在,,u v w 方向的分量;,,G G G x y z :表示平台重心位置(m ); ,,B B B x y z :表示平台重心位置(m ); W 、B-----重力和浮力(N)。
一、概述状态空间法是一种经典的控制工程方法,它可以用来求解动力学系统的运动方程。
对于多自由度系统而言,状态空间法可以更加直观地描述系统的运动规律,方便进行控制器设计和系统分析。
本文将以6自由度运动方程为例,介绍状态空间法的求解过程。
二、背景知识1. 6自由度运动6自由度运动是指物体在三维空间中具有6个独立的自由度,它们可以分别描述物体的位置和姿态。
这种运动状态下,物体的运动方程相对复杂,需要通过合适的方法进行求解。
2. 状态空间法状态空间法是一种用矩阵和向量表示动力学系统运动方程的方法。
它将系统的状态量表示为向量,将系统的输入和输出表示为矩阵,通过线性代数的方法求解系统的数学模型。
三、状态空间法求解步骤1. 系统建模我们需要根据物体的运动特性建立系统的动力学模型。
对于6自由度运动,可以利用牛顿-欧拉方程或拉格朗日方程进行建模,得到系统的运动方程。
2. 状态量定义将系统的状态量表示为一个状态向量,其中包括物体的位置、速度、加速度和姿态等信息。
3. 定义输入输出系统的输入输出可以表示为矩阵,其中输入是外部施加的力或扭矩,输出是系统的位置和姿态信息。
4. 构建状态方程根据系统的动力学模型和状态量定义,可以建立系统的状态方程。
状态方程描述了系统状态的演变规律,可以用矩阵形式表示为x' = Ax + Bu,其中x'为状态变化率,A为状态转移矩阵,B为输入矩阵,u为外部输入。
5. 构建输出方程根据系统的输出定义,可以建立系统的输出方程。
输出方程描述了系统的输出与状态和输入之间的关系,可以用矩阵形式表示为y = Cx + Du,其中y为系统的输出,C为输出矩阵,D为直接传递矩阵。
6. 求解系统通过线性代数的方法,可以求解状态方程和输出方程,得到系统的数学模型。
这个模型可以用来进行系统分析、控制器设计等工作。
四、实例分析我们以一个飞行器的姿态控制系统为例,介绍状态空间法求解6自由度运动方程的具体步骤。
飞机六自由度模型及仿真研究一、本文概述随着航空工业的快速发展和飞行器设计的日益复杂化,对飞机动力学特性的理解和分析变得越来越重要。
其中,飞机的六自由度模型是理解和分析飞机动力学特性的基础工具。
本文旨在深入探讨飞机六自由度模型的建立过程,以及基于该模型的仿真研究。
我们将首先介绍飞机六自由度模型的基本概念和理论框架,然后详细阐述模型的建立过程,包括动力学方程的推导、运动学方程的构建以及控制逻辑的设计。
在此基础上,我们将展示如何利用该模型进行仿真研究,包括飞行轨迹的模拟、飞行稳定性的分析以及飞行控制策略的优化等。
我们将总结飞机六自由度模型及仿真研究的重要性,并展望未来的研究方向和应用前景。
本文的目标读者包括航空工程领域的学者、工程师以及研究生,希望通过本文的阐述,能够帮助读者更好地理解和掌握飞机六自由度模型及仿真研究的相关知识和技术。
我们也希望本文的研究能够对飞行器设计、飞行控制以及飞行安全等领域的发展提供一定的理论支持和实践指导。
二、飞机六自由度模型建立在飞行动力学中,飞机的运动可以分解为六个自由度:三个沿坐标轴的平动(纵向、横向和垂直)和三个绕坐标轴的转动(滚转、俯仰和偏航)。
六自由度模型的建立是飞行仿真研究的基础,它能够全面、准确地描述飞机的空间运动特性。
我们需要定义飞机的坐标系和参考坐标系。
通常采用机体坐标系来描述飞机的姿态和运动,而地面坐标系或惯性坐标系则用于描述飞机的位置和速度。
在机体坐标系中,飞机的滚转、俯仰和偏航运动可以通过欧拉角来描述。
接下来,根据牛顿第二定律和动量矩定理,建立飞机的运动方程。
这些方程包括沿三个坐标轴的平动方程和绕三个坐标轴的转动方程。
平动方程描述了飞机的加速度与所受合力的关系,而转动方程则描述了飞机的角加速度与所受合力矩的关系。
在建立运动方程时,需要考虑飞机的质量、质心位置、惯性矩等参数,以及作用在飞机上的各种力(如重力、推力、升力、阻力等)和力矩(如滚转力矩、俯仰力矩、偏航力矩等)。
建立飞机飞行动力学模型飞机的本体飞行动力学模型分为非线性模型和线性模型。
如图所示,线 性模型常用于飞机的飞行品质特性分析和飞行控制律设计,而非线性模型通常 用于飞机稳定性和操纵性特征的精确估计,从而进行各种非线性特征和线性模 型的误差分析。
另外,非线性模型还特别用在一些特殊的飞行任务,例如大迎 角和快速机动飞行等线性模型不适用的场合。
线性模型:主要进行飞机飞行品质 分析歩飞行控制律设计建立全量非线性六自由度运动方程 (1) 刚体飞机运动的假设['3]: ① 飞机为刚体且质量为常数;② 固定于地面的坐标系为惯性坐标系;③ 固定于机体的坐标系以飞机质心为原点;④ 忽略地球曲率,即采用所谓的“平板地球假设”; ⑤ 重力加速度不随飞行高度变化;以上假设是针对几云Jv3,H<30加飞机的。
(2) 坐标系说明:① 地面坐标轴系凡一 Q x:夕。
29:在地面上选一点09,使xg 轴在水平面内 并指向某一方向,z 。
轴垂直于地面并指向地心,yg 轴也在水平面内并 垂直于X 。
轴,其指向按照右手定则确定,如图2 一 3(a)② 机体坐标轴系凡一 d 朴忆:原点O 取在飞机质心处,坐标系与飞机固 连,x 轴在飞机对称面内并平行于飞机的设计轴线指向机头 ,y 轴垂直全董六自由度非蝇性动力学模型非陸模型:主要进行恃奏验证 和非线性分析四阶纵向动 力学模型四外横航向 动力学模型短周期近似模型于飞机对称面指向机身右方 机身下方,如图2 一 3(b)。
oy,:轴在飞机对称面内,与x 轴垂直并指向乩地面坐标轴系氐机体坐标轴系 图2胡常用塑标系说明⑶刚体飞机的全量六自由度非线性运动方程为 力方程组: 力矩方程组: - /)-匚(/十阳)一你3-小)二丄人=A0 二 p + q sin 0 tan 0 十 r cos 0 tan 0W一 心因-几 3 -qJ-钮+v )-4(p —")二览=v 运动方程组: & - i/COS^ 一厂血00 二 ------ (q sin 0 + r cos 0)COS0v - pw一 皿+輕歸讪+ :(F —圖) w — qu —严+心肌0讣(益+导航方程组:ccs^ + 训一sin 妙LOH0 丰cos sin 9 sin 0 + w (sin 肖sin / + cos sin cos y, = sin y/cos0 + r(co$4y cosc* + siny/sin6?sin 0) + ^-cos^sin + sin^ sin Otosd) h --nsin 0 - vcos^sin^ - wcostf cos^符号说明:心飞机质量,重力加速度:2b E机机翼禹税、平均T动茁长和展検:u,v,w速度矢命在分别在体轴条厂八二上的投影;p.q”体轴宗相对于地轴系旋转角速度矢览分别在体轴^x.y.z上的投影;%动力在体耙系各轴上的投勲貝丹押的,丫皿沖.推力在休轴系各细上的投影*飞机的俯仰角、滚转角和偏航角;飞机迎角*侧滑角和绕速度轴矢戟的滚转角;总机速區矢量.飞机航迹倾斜角.荻迹偏转角;飞机体轴系下各轴的转动惯电:匕机体轴系下谷轴的惯性积;飞机所爱升力、胆力、侧力和发动机抵力:合力矩分别在体轴系「丫2上的投影;E机位垃欠_&在炮轴系上的投影柯飞机岛度:飞机升降蛇偏角、亂罠倔角、方向舵偏角和油门位置:建立飞机小扰动线化方程(I)基本假设:①小扰动假设:我们把运动状态与飞机基准运动状态差别很小的扰动运动称为小扰动运动。
飞机六自由度飞行动力学仿真实验一.实验目的1.本实验将理论力学课程教学内容与航空航天工程应用相结合,分析、研究飞机受力与六自由度运动特性,培养学生分析问题和解决问题的能力,展现理论力学知识在航空航天工程中的应用。
2.通过本实验,使学生更好地学习和理解理论力学的有关内容,如飞机的受力分析、空间力系的简化与合成、刚体的平面运动与一般运动、刚体微分方程的建立与求解等,激发学生对理论力学的学习兴趣,开阔视野,增强工程概念。
二.实验仪器与设备实验在PC 个人计算机、WINDOWS 98以上操作系统环境中进行。
三.实验原理飞机在空中的运动,在一定的假设条件下,可以视为理想刚体的运动,遵循刚体的运动规律,理论力学中介绍的刚体平动和转动基本定律都适用于飞行器的运动分析。
飞机在空中的运动为刚体的一般运动,具有六个自由度。
通常建立的机体坐标系如下图所示。
飞机的一般运动可以分解为随质心的平动和绕质心的转动,随质心的平动的速度可表示为 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=W V U V G ,绕质心的转动角速度可表示为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=R Q P ωG 。
飞机受到的气动力、发动机推力、重力是一个空间任意力系,向质心简化的主矢和主矩分别为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=Fz Fy Fx F G 和⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=Mz My Mx M G 。
根据质心运动定理(牛顿方程)和相对于质心的动量矩定理可得飞机的动力学微分方程,一般说来,该方程没有解析解,只能通过数值积分得到数值解。
系统分为“概念演示”与“f16实时仿真”两大模块。
在“概念演示”模块中着重介绍了飞机运动的自由度、单自由度下的操纵与响应特性。
在“f16实时仿真”模块中介绍了飞机定直平飞、盘旋、拉起、起飞、着陆、失速尾旋等的飞行过程及受力情况,学生也可以亲自驾驶这架F16进行实时仿真飞行。
四.实验步骤1.概念演示六自由度演示:点击菜单“概念演示->六自由度演示”,进入六自由度演示状态,如下图所示。