功率因素控制器原理.共21页文档
- 格式:ppt
- 大小:3.12 MB
- 文档页数:21
功率因数补偿控制器的工作原理及设计方案功率因数补偿控制器是一种用于提高电力系统功率因数的装置,通过对电网中的无功功率进行补偿来达到功率因数优化的目的。
本文将从功率因数的概念入手,介绍功率因数补偿控制器的工作原理,并提出一种设计方案来实现功率因数补偿。
一、功率因数的概念与重要性功率因数是指交流电路中的有功功率与视在功率之比。
当负载电器的功率因数小于1时,说明负载电器存在一定的无功功率,会导致电网中的无功耗电增加,能量的利用率低。
因此,提高功率因数可以减少无功损耗,提高电能的利用效率。
二、功率因数补偿控制器的工作原理1.电流检测:通过电流互感器等装置检测电流的大小和相位角,以用于计算功率因数的补偿量。
2.信号处理:将电流检测到的信号进行放大、滤波、线性化等处理,以便后续的控制计算和输出。
3.计算控制:根据电流检测到的信号和设定的功率因数目标值,通过控制算法计算出所需的补偿量,同时得到控制信号。
4.输出控制:将计算得到的控制信号转换为相应的电压或电流输出,驱动功率因数补偿设备进行补偿操作。
5.反馈调节:根据补偿操作后的电流进行反馈,对补偿量进行调节,从而实现对功率因数的精确控制。
三、功率因数补偿控制器的设计方案针对功率因数补偿控制器的设计,可以考虑以下几个方面:1.选取合适的补偿装置:常用的补偿装置有电容器、电感和静止补偿器等。
根据不同的负载特点和功率因数要求,选择适用的补偿装置。
2.设计控制算法:根据电流检测到的信号和功率因数目标值,设计合适的控制算法。
常用的控制算法有PID控制、模糊控制和神经网络控制等。
3.选择合适的控制器芯片:根据控制算法的需求,选择合适的控制器芯片,如单片机或DSP芯片,用于进行控制计算和输出。
4.安全保护设计:考虑到功率因数补偿装置可能遇到过电流、过压等问题,需要设计相应的安全保护电路来保护控制器和补偿装置。
5.系统的可靠性设计:设计电源稳定、抗干扰等电路,提高控制系统的稳定性和可靠性。

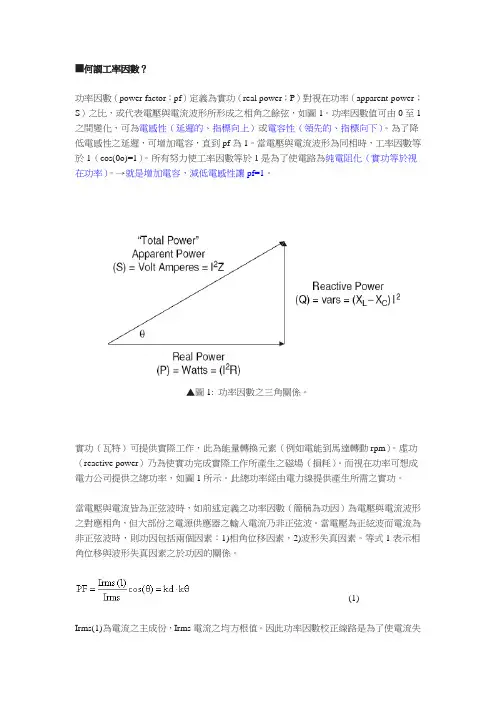
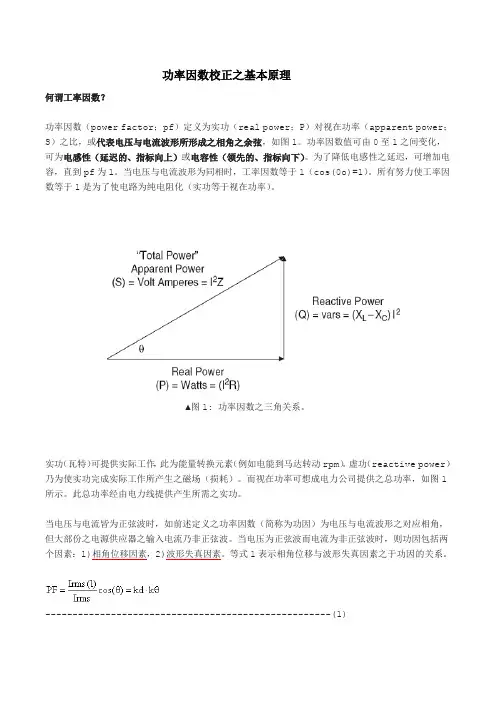
■何謂工率因數?功率因數(power factor;pf)定義為實功(real power;P)對視在功率(apparent power;S)之比,或代表電壓與電流波形所形成之相角之餘弦,如圖1。
功率因數值可由0至1之間變化,可為電感性(延遲的、指標向上)或電容性(領先的、指標向下)。
為了降低電感性之延遲,可增加電容,直到pf為1。
當電壓與電流波形為同相時,工率因數等於1(cos(0o)=1)。
所有努力使工率因數等於1是為了使電路為純電阻化(實功等於視在功率)。
→就是增加電容,減低電感性讓pf=1。
▲圖1: 功率因數之三角關係。
實功(瓦特)可提供實際工作,此為能量轉換元素(例如電能到馬達轉動rpm)。
虛功(reactive power)乃為使實功完成實際工作所產生之磁場(損耗)。
而視在功率可想成電力公司提供之總功率,如圖1所示。
此總功率經由電力線提供產生所需之實功。
當電壓與電流皆為正弦波時,如前述定義之功率因數(簡稱為功因)為電壓與電流波形之對應相角,但大部份之電源供應器之輸入電流乃非正弦波。
當電壓為正絃波而電流為非正弦波時,則功因包括兩個因素:1)相角位移因素,2)波形失真因素。
等式1表示相角位移與波形失真因素之於功因的關係。
----------------------------------------------------(1)Irms(1)為電流之主成份,Irms電流之均方根值。
因此功率因數校正線路是為了使電流失真最小,且使電流與電壓同相。
當功因不等於1時,電流波形沒有跟隨電壓波形,不但有功率損耗,且其產生之諧波透過電力線干擾到連接同一電力線之其它裝置。
功因越接近1,幾乎所有功率皆包含於主頻率,其諧波越接近零。
■瞭解規範EN61000-3-2對交流輸入電流至第40次諧波規範。
而其class D對適用設備之發射有嚴格之限制(圖2)。
其class A要求則較寬鬆(圖3)。
▲圖2:電壓與電流波形同相且PF=1(Class D)。
电器开关原理解读:功率因数控制与功率优化电器开关是现代家庭生活中必不可少的一种设备,它能够控制电流的通断,实现电器的开关和关闭。
而在电器开关的运作过程中,功率因数控制与功率优化起到了至关重要的作用。
首先,我们来了解一下功率因数的概念。
功率因数是指电器负载对电网有用功的利用程度,即有功功率与视在功率的比值。
一个高功率因数表示电器能够更有效地利用电能,减少了无效的电能损耗,节能效果显著。
在正常的家庭电路中,电流呈交流形式,并且存在着电压和电流的相位差。
功率因数控制就是通过改变电流波形,使得电流与电压的相位差较小,从而提高功率因数。
电器开关中的功率因数控制功能是通过电子元器件实现的,比如使用陶瓷电容器等,在电路中串联或并联一定的电容,以改变电流的波形。
这样,电流与电压的相位差减小,功率因数得到了提高。
功率优化是指通过一系列的技术手段,最大限度地利用电能,使得电器的功率因数更趋近于1,从而达到节能效果。
电器开关中的功率优化功能是通过高效率的电子元件和智能控制算法来实现的。
在电路中,引入高效率的变流器、能量回收装置等,以提高电能的利用率和转换效率。
同时,通过智能控制算法,根据电器负载的实际情况,动态调整电器的工作状态,进一步优化功率因数。
功率因数控制与功率优化在电器开关中的应用,对于提高电器的能源利用效率、延长电器的使用寿命、降低电网负荷等方面都有积极的作用。
首先,功率因数控制和功率优化能够减少电器的无效功耗,提高电能的利用率。
在传统的家庭电路中,存在着较大的无功功耗,造成电能的浪费。
而通过功率因数控制和功率优化,可以减少电路中的无功功耗,并增加有用功的利用,从而达到节能的效果。
其次,功率因数控制和功率优化也能够减少电器的损耗,延长电器的使用寿命。
高功率因数时,电器的负载对电网的冲击较小,减少了电器的损耗。
同时,在功率优化的过程中,通过调整电压和电流的波形,使得电能在电器内部的传输更加稳定,减少了电器元件的热损耗,延长了电器的使用寿命。
功率因数控制器1. 引言功率因数控制器是一种用于提高电力系统功率因数的电子设备。
在电力系统中,功率因数是指有功功率与视在功率之比。
功率因数控制器通过控制电路中的电流和电压来实现功率因数的调整,从而改善电力系统的效率和稳定性。
本文将介绍功率因数控制器的工作原理、应用场景和优势。
2. 功率因数控制器的工作原理功率因数控制器通过监测电流和电压的相位差来确定功率因数,并通过控制电路中的电感和电容来调整功率因数的值。
具体而言,功率因数控制器会根据电路的实际功率因数与设定值之间的差异,调整电感和电容的数值来实现功率因数的改善。
功率因数控制器可以采用各种控制算法,如模糊控制、PID 控制等,以实现精确的功率因数控制。
此外,功率因数控制器还可以通过电流和电压的监测来提供保护功能,如过载保护、过压保护等。
3. 功率因数控制器的应用场景功率因数控制器主要应用于电力系统中的工业和商业用电领域。
以下是几个常见的应用场景:3.1 工厂工厂的电力需求通常较大,并且在生产过程中会产生较多的感性负载。
功率因数控制器可以通过控制电路中的电感和电容来补偿感性负载的影响,提高电力系统的功率因数,减少电力损耗,提高电力利用效率。
3.2 商场商场通常有较高的用电需求,且用电负载波动较大。
功率因数控制器可以根据实际用电负载情况动态调整功率因数,保持电力系统的稳定性,并降低电力公司对商场的罚款。
3.3 医院医院的电力需求对电力质量和稳定性要求较高。
功率因数控制器可以提高电力系统的功率因数,降低谐波扰动,减少电力系统对敏感医疗设备的影响,提高医院的电力供应可靠性。
4. 功率因数控制器的优势功率因数控制器具有以下几个优势:4.1 提高电力系统效率功率因数控制器可以提高电力系统的功率因数,减少无效功率的损耗,提高电力系统的效率。
4.2 降低电力损耗功率因数控制器通过减少电流和电压之间的相位差,降低了电力系统中的无功功率,从而减少了电力损耗。
4.3 减少能源消耗功率因数控制器的优化调整可以减少电力需求,从而减少对能源的消耗,降低环境污染。
电器开关原理解读:功率因数控制与功率优化电器开关是电力系统中常见的一种控制器件,功率因数控制和功率优化是其重要的工作原理。
本文将对功率因数控制与功率优化进行解读。
首先,我们来解读功率因数控制的原理。
功率因数是指在交流电路中,电流与电压之间的相位关系。
功率因数是一个无量纲的数值,通常介于-1到1之间,表示功率的有效利用程度。
一个理想的功率因数是1,对应于电流和电压是完全同相的。
功率因数控制的目的是调节电路中的电流和电压之间的相位关系,使得功率因数能够接近1,从而提高电能的利用效率和质量。
在电路中,电感和电容是两个常见的元件。
当电路中存在电感或电容时,电流和电压波形之间会产生相位差,从而降低功率因数。
功率因数控制通过改变电感和电容的电流、电压和频率,调整电流和电压之间的相位差,进而提高功率因数。
一种常见的功率因数控制方法是使用电容器并联到负载上,通过改变电容器的容值,对电流和电压之间的相位关系进行调整,以实现功率因数的优化。
接下来,我们来解读功率优化的原理。
功率优化是指通过优化电路参数,提高电路的效率和性能。
电器开关在设计和运行时,需要通过多种手段来实现功率优化,提高能源利用效率。
首先,电器开关需要具备高效的能量转换能力。
在电能传输和转换中,能量的转换损耗是不可避免的,因此需要通过优化电路设计和选用高效率元件,来减少能量转换损耗,提高电器开关的能效。
其次,功率优化还包括对电器开关的控制和调节。
电器开关需要根据负载的不同需求,实时调整电流和电压的大小和波形,以提供最佳的电源供应。
通过电器开关的高精度控制和调节,可以实现负载的高效工作,减少能源浪费。
最后,功率优化还包括电器开关的硬件和软件设计。
在硬件设计中,需要选择高效的电路拓扑和元件,以及合理布局电路板,减少电路的损耗和噪声。
在软件设计中,需要优化电器开关的控制算法和调节策略,以实现最优的功率调整和功率转换。
综上所述,功率因数控制和功率优化是电器开关的重要工作原理。
功率控制器原理功率控制器是一种用于控制电器设备的电子设备。
它的主要作用是实现电气设备的功率控制,以达到节能、保护设备、保障安全的目的。
在各种领域中,功率控制器的应用越来越广泛,例如工业控制、家庭用电等。
功率控制器原理主要是通过控制电压和电流来实现对设备功率的调节。
通俗地说,功率控制器就是一个能够控制电气设备功率输出的机构,可以通过它调节设备的输出功率大小。
从技术层面上,功率控制器由硬件和软件两部分组成,主要包括电路板、电源、控制芯片等。
通过这些组成部分,功率控制器可以实现对不同电器设备的功率控制。
功率控制器的原理可以分为两类,一种是电源型功率控制器,另一种是波形型功率控制器。
电源型功率控制器主要是通过降低无序的电源的电压,来控制电器的功率。
而波形型功率控制器则是通过控制电源的电流波形,来实现对电气设备功率的调节。
在工业、家用等领域中,功率控制器的应用非常广泛。
例如,对于高功率设备,通过功率控制器可以减少设备的功率,以达到降低运行成本和延长设备使用寿命的目的。
此外,功率控制器还可以帮助控制电气设备的起动和停止,以达到更加安全的工作环境。
在农业、医疗等领域中,功率控制器也被广泛运用,例如农业灌溉、医疗设备控制等。
在选购功率控制器时,需要注意选择适合自己需求的功率控制器。
一般情况下,需要注意功率控制器的承载能力及控制能力等方面。
此外,还需要考虑功率控制器的控制方式、安装方式等因素。
总之,功率控制器是一种非常重要的电子设备,在现代的各个领域都得到了广泛的应用。
只有通过科学合理的选择和使用,才能充分发挥功率控制器的作用,为人们创造更好的生活和工作环境。
功率因数校正(PFC)电路工作原理功率因数校正(PFC)电路工作原理作者:佚名文章来源:本站原创点击数: 943 更新时间:2010-2-20 9:15:00 | 【字体:小大】功率因数校正(英文缩写是PFC)是目前比较流行的一个专业术语。
PFC是在20世纪80年代发展起来的一项新技术,其背景源于离线开关电源的迅速发展和荧光灯交流电子镇流器的广泛应用。
PFC电路的作用不仅是提高线路或系统的功率因数;更重要的是可以解决电磁干扰(EMI)和电磁兼容(EMC)问题。
线路功率因数降低的原因及危害:导致功率因数降低的原因有两个,一个是线路电压与电流之间的相位角ψ,另一个是电流或电压的波形失真。
前一个原因人们是比较熟悉的。
而后者在电工学等书籍中却从未涉及。
功率因数(PF)定义为有功功率(P)与视在功率(S)之比值,即PF=P/S。
对于线路电压和电流均为正弦波波形并且二者相位角为ψ时,功率因数PF即为cosψ。
由于很多家用电器(如排风扇、抽油烟机等)和电气设备是既有电抗的阻抗负载,所以才会存在着电压与电流之间的相位角ψ。
这类电感性负载的功率因数都较低(一般为0.5~0.6),说明交流(AC)电压设备的额定容量不能充分利用,输出大量的无功功率,致使输电效率降低。
为提高负载功率因数,往往采取补偿措施。
最简单的方法是在电感性负载两端并联电容器,这种方法称为并联补偿。
PFC方案完全不同于传统的'功率因数补偿',它是针对非正弦电流波形而采取的提高线路功率因数、迫使AC线路电流追踪电压波形的瞬时变化轨迹,并使电流与电压保持同相位,使系统呈纯电阻性的技术措施。
长期以来,像开关型电源和电子镇流器等产品,都是采用桥式整流和大容量电容滤波电路实现AC-DC转换的。
由于滤波电容的充、放电作用,在其两端的直流电压出现略呈锯齿波的纹波。
滤波电容上电压的最小值远非为零,与其最大值(纹波峰值)相差并不多。
根据桥式整流二极管的单向导电性,只有在AC线路电压瞬时值高于滤波电容上的电压时,整流二极管才会因正向偏置而导通,而当AC输入电压瞬时值低于滤波电容上的电压时,整流二极管因反向偏置而截止。
功率因数校正之基本原理何谓工率因数?功率因数(power factor;pf)定义为实功(real power;P)对视在功率(apparent power;S)之比,或代表电压与电流波形所形成之相角之余弦,如图1。
功率因数值可由0至1之间变化,可为电感性(延迟的、指标向上)或电容性(领先的、指标向下)。
为了降低电感性之延迟,可增加电容,直到pf为1。
当电压与电流波形为同相时,工率因数等于1(cos(0o)=1)。
所有努力使工率因数等于1是为了使电路为纯电阻化(实功等于视在功率)。
▲图1: 功率因数之三角关系。
实功(瓦特)可提供实际工作,此为能量转换元素(例如电能到马达转动rpm)。
虚功(reactive power)乃为使实功完成实际工作所产生之磁场(损耗)。
而视在功率可想成电力公司提供之总功率,如图1所示。
此总功率经由电力线提供产生所需之实功。
当电压与电流皆为正弦波时,如前述定义之功率因数(简称为功因)为电压与电流波形之对应相角,但大部份之电源供应器之输入电流乃非正弦波。
当电压为正弦波而电流为非正弦波时,则功因包括两个因素:1)相角位移因素,2)波形失真因素。
等式1表示相角位移与波形失真因素之于功因的关系。
----------------------------------------------------(1)Irms(1)为电流之主成份,Irms电流之均方根值。
因此功率因数校正线路是为了使电流失真最小,且使电流与电压同相。
当功因不等于1时,电流波形没有跟随电压波形,不但有功率损耗,且其产生之谐波透过电力线干扰到连接同一电力线之其它装置。
功因越接近1,几乎所有功率皆包含于主频率,其谐波越接近零。
■了解规范EN61000-3-2对交流输入电流至第40次谐波规范。
而其class D对适用设备之发射有严格之限制(图2)。
其class A要求则较宽松(图3)。
▲图2:电压与电流波形同相且PF=1(Class D)。
第四章 APFC4.1 功率因素校正技术的由来由整流二极管和滤波电容组成的整流滤波电路具有很多优点:应用广泛、价格低廉、可靠性高等,但是它产生的谐波对电网有着严重的污染,单项不可控整流电路存在以下几个主要的问题:(1)启动时冲击电流大;(2)正常工作时,由于二极管的导通角是<180°,会形成幅度很高的窄脉冲,总谐波失真THD通常超过100%,从而引起了电网电压波形的畸变。
(3)谐波带来的电路功率因数低,一般约为0.5~0.6,造成电路的效率低。
由整流电路可知,二极管整流滤波电路,因为二极管的导通角<180°,以及无源器件电感L、电容C导致的输入信号发生畸变,不但降低了系统的功率因数,效率大大减小,还造成噪声和对电网冲击等一系列的危害。
因此,为了减小AC/DC交流电路输入端谐波电流造成的噪声和谐波污染,保证电网高质量供电以及高可靠性;同时,通过相关技术达到电路节能的效果。
以上阐述都表明了研究提高电路功率因数重要性,因此提出了功率因数校正技术(PFC)的概念。
那如何提高功率因数?根据第三章整流电路的分析可知,功率因数λ=PS=cosφ=υ∙cosφ1主要由两个因素决定:基波因数和相位因数。
因此,通过提高基波因数υ=I1I和相位因数cosφ1是两个主要的途径:(1)使输入电压、输入电流同相位。
若输入电压与输出电压同相位,则相位因素cosφ1为1,功率因素λ增大;(2)使输入电流正弦化若输入电流正弦化,即电流频率保持固定,几乎不存在谐波分量,υ=I1I=1,功率因素λ增大。
满足以上两个条件,功率因素将接近为1,电路效率将非常高。
4.2 PFC的分类根据使用器件的不同,分为无源功率因数校正和有源功率因数校正。
根据有无整流桥,分为有桥PFC和无桥PFC。
无源PFC无源PFC一般采用电感补偿方法。
这种方式是使用由电感、电容等无源器件组合而成的谐振电路来降低谐波电流,以及减小交流输入的基波电流与电压之间相位差,从而提高功率因数。
功率因数自动补偿控制器工作原理功率因数自动补偿器是提高电网系统中功率因数的全自动化电子装置,通过它的调节作用,使电网中的无功消耗降到最小,达到充分利用电能、节约用电的目的。
我站使用的GBK4-1C 型控制器,是通过检测系统中的负荷的功率因数自动投、切补偿电容器使系统功率因数在规定的范围内运行。
检测功率因数投、切法的思想是,当一个系统功率因数下降至低于下限整定值时投入补偿电容器,当功率因数超过上限整定值时切除补偿电容器。
图一说明此控制方式的原理。
图中OA为功率因数下限整定值COSj A线,OB为功率因数上限整定值COSj B线,假设负荷线沿OD直线增加,其功率因数为COSj ,当负荷增至临界调节功率点M1时,电容器C1投入,这时补偿的无功功率为M1K1,视在功率为OK1,使功率因数在OA、OB两直线限定的范围内。
若负荷继续增至M2点时,电容器C2又投入运行,又将功率因数控制在规定的范围内,负荷若再增至M3点时,电容器C3投入,使功率因数维持在规定的范围内。
当负荷减少时,如由K3点减少至N1点时,电容器C1被切除,负荷若减少到N2点时,电容器C2又被切除,当负荷减少至临界调节功率线左面时,电容器被全部切除。
这里临界调节线的位置取决于最小补偿电容器组的容量,负荷的性质以及所规定的功率因数的调节范围。
图二为自动补偿控制器原理图。
图中按虚线将控制器分成:、测量部分;、直流放大部分;、执行部分;、电源部分。
工作如下:先将交流电压与电流间的相位差,转换成直流电压信号,再将直流信号放大驱动执行部分动作,投入或切除补偿电容器。
测量部分的交流信号取自电网系统中母线A、C相线电压uAC和B相电流iB,由图三知三相交流系统中,当B相电流iB与B相电压uB同相,即COSj =1时,相电流iB与线电压uAC相差为p /2,当iB超前或滞后uB时,iB、uAC相位差就会小于或大于p /2,为了测出这种相位关系的变化,测量部分采用半波相敏差分放大线路,u1、u2分别反映交流侧uAC 及iB相位的两个交流电压值。
功率因数控制原理
功率因数控制原理是指调整电路中的功率因数,使其接近于1
的一种控制方法。
在交流电路中,功率因数是指实际功率与视在功率之比。
视在功率包括有功功率和无功功率,其中有功功率用于产生有用的功率,如照明、电动机运转等;无功功率则是由电动机的电感性负载引起的,如电容器的充放电。
实际功率是指实际转化为有用功率的功率。
正常情况下,电路中的功率因数应尽可能接近于1,这样可以
提高电能的利用率,减少电路中的无功功率损耗,以及减少对电网的负荷影响。
然而,许多电气设备的功率因数往往偏离1,甚至较低,导致能源浪费和电网过载。
为了调整功率因数,常用的方法是使用功率因数校正装置,如电容器等。
功率因数校正装置通过在电路中串联或并联连接适当的电容器,来改变电路中的无功功率的大小和相位,从而达到调整功率因数的目的。
具体控制原理为:通过感应电容器的无功电流大小,和电路中的功率因数之间的关系,来计算需要校正的功率因数大小和方向。
然后,根据这个计算结果,控制功率因数校正装置中电容器的接入或切除,以达到调整功率因数的目的。
功率因数校正装置需要根据实际电路的工作和负载特性进行参数调整和优化。
同时,应定期检查装置的工作状态和电容器的容量,以保证功率因数的稳定和准确控制。
综上所述,功率因数控制原理是一种通过调整电路中的无功功率大小和相位,来实现功率因数接近1的控制方法。
这种控制方法可以提高电能的利用率,减少能源浪费和对电网的负荷影响,并且需要根据实际电路情况进行参数调整和优化,以保证功率因数的稳定控制。
功率因数控制器原理
功率因数控制器是一种用于对电力系统中的功率因数进行实时调节的装置。
它的工作原理基于电力系统中的功率三角形理论。
功率因数是指交流电路中有功功率与视在功率之比的数值,用来描述负载电流和电压之间的相位差。
功率因数的大小直接影响电力系统的运行效率和电能的利用率。
功率因数控制器的主要作用是通过调节电路中的电感或电容元件,使得负载电路的功率因数接近单位功率因数(即1),从
而提高电力系统的功率因数和电能的利用效率。
功率因数控制器的工作原理如下:
1. 检测功率因数:通过测量电流和电压的相位差,以及有功功率和视在功率的比值,计算出当前的功率因数数值。
2. 比较设定值:将测量得到的功率因数数值与设定的目标功率因数进行比较。
3. 生成控制信号:根据比较结果,通过控制算法生成相应的控制信号。
如果当前功率因数低于设定值,控制器将增加电路中的电感元件,以增加电感元件对电流的滞后作用,使得功率因数增加;如果当前功率因数高于设定值,控制器将增加电路中的电容元件,以增加电容元件对电流的超前作用,使得功率因数减小。
4. 执行控制操作:根据生成的控制信号,控制器将控制命令发送给电路中的电感或电容元件,使其加入或退出电路,从而实现对功率因数的调节。
功率因数控制器具有实时性和精确性,能够对电力系统中的功率因数进行有效调节,提高电能的利用率,降低电能损耗,提高电力系统的运行效率。
在工业生产和电力供应领域得到广泛应用。