汽机控制器
- 格式:doc
- 大小:263.50 KB
- 文档页数:11
燃机电⼚CCS、MCS逻辑说明燃机电⼚MCS逻辑1.协调控制系统协调控制包括:机组负荷控制(CJA00DE)、压⼒设定回路(CJA00DP)、燃机排⽓温度设定回路(CJA00DT)。
包括:50CJA00DE100机组负荷设定50CJA00DE100A机组速率设定50CJA00DE100B机组总负荷设定值50CJA00DE100C机组电⽹负荷设定50CJA00DE110 机组负荷上下限50CJA00DP100 ⾼压蒸汽压⼒设定50CJA00DP200中压蒸汽压⼒设定50CJA00DP300低压蒸汽压⼒设定50CJA00DT100 燃机排⽓温度设定50CJA00DT110 蒸汽温度设定50CJA00DT200 燃机排⽓最⼤温度设定2.机组负荷控制(CJA00DE)机组的负荷和温度设定采⽤外部设定,此设定影响燃机的负荷和温度控制。
燃机的控制(负荷控制和温度控制)经过MIN-gate(取⼩功能块)后运⾏⾄次级的位定控制器,以控制进⼊燃机的燃料量。
燃料量决定燃机负荷和燃机排⽓温度;后者与燃机的IGV (进⽓导叶)协同作⽤,这样最终调节燃机的空⽓流量,从⽽控制燃机的排⽓温度。
在机组负荷和温度设定值范围内,也应考虑启动和运⾏过程中余热锅炉的热应⼒。
由于燃机的排⽓总是通过余热锅炉排出(⽆转向挡板,也可认为是旁路挡板),模块设定值GT正常情况下总是投⼊(通过⼀个带选择开或关(ON/OFF)的设定值模块实现,见50CJA00EE010)此设定值将在以下情况退出:1) 在异常或不正常情况下⼿动退出;2) 燃机的负荷限制发⽣时,由燃机控制器⾃动切为⼿动;机组负荷设定(50CJA00DE100)代表了联合循环运⾏的负荷设定。
此设定值能够由运⾏⼈员⼿动调节,运⾏⼈员可以设定整个电⼚传送⾄电⽹的净出⼒(50CJA00DE100C)也可以设定⽑出⼒,即总的发电出⼒(50CJA00DE100B)。
净出⼒设定能通过远程控制进⾏调节,如AGC指令。
浅述汽轮机WOODWARD调速控制器更新升级汽轮机的调速控制器是确保汽轮机运行稳定、安全和可靠的关键设备之一。
随着科学技术的进步和汽轮机的发展,调速控制器也需要不断更新升级,以适应新的运行要求和技术发展。
WOODWARD是一家全球知名的调速控制器生产厂家,他们的产品在汽轮机调速控制领域具有很高的信誉和市场份额。
他们不断研发新的产品和技术,提供更先进、更智能和更可靠的调速控制器,以满足用户的需求和期望。
1.控制算法的改进:随着自动化技术的发展和控制理论的深入研究,WOODWARD调速控制器的控制算法也得到了不断改进。
新的算法可以更准确地预测和响应汽轮机的负荷变化,使汽轮机的调速性能更好,运行更加稳定。
2.硬件的升级:随着电子技术的不断进步,WOODWARD调速控制器的硬件也得到了升级。
新的硬件可以提供更高的计算和存储能力,支持更复杂的算法和更大规模的数据处理。
新的硬件还具有更好的可靠性和抗干扰性能,可以更好地应对复杂的运行环境。
3.通信接口的改进:现代汽轮机通常采用分布式控制系统,调速控制器需要与其他设备进行有效的通信。
WOODWARD调速控制器更新升级中,通信接口的改进是一个重要的方面。
新的通信接口可以与其他设备更方便地进行数据交换和信息共享,提高汽轮机系统的整体性能和效率。
4.故障诊断和维护功能的增强:WOODWARD调速控制器的更新升级还包括故障诊断和维护功能的增强。
新的调速控制器可以利用先进的传感器和监测技术,实时监测和诊断汽轮机的运行状态,及时发现故障并采取措施修复。
新的调速控制器还提供更多的维护信息和操作指导,方便用户进行维护和保养。
WOODWARD调速控制器的更新升级对于提高汽轮机的性能、可靠性和安全性非常重要。
随着科学技术的不断进步和汽轮机的不断发展,调速控制器需要不断更新升级,以适应新的运行要求和技术发展。
WOODWARD作为全球领先的调速控制器生产厂家,不断研发新的产品和技术,为用户提供更先进、更智能和更可靠的调速控制器。
应用可编程控制器进行200MW发电机组汽机自动保护系统改造摘要:继电器形式的汽轮机保护装置存在许多不足,将其改造为以计算机技术为核心的新型控制装置,会大大增强机组运行的安全性和可靠性。
关键词:汽轮机自动保护可编程控制器安全性可靠性1、概述汽轮机是火力发电厂的主要设备,由锅炉产生的高温高压蒸汽带动其高速运转,200mw机组汽轮机的转速是3000转/分钟,其安全性极其重要。
汽轮机自动保护系统(ets即emergency tripsystem)是发电厂对系统可靠性要求最高的子系统,主要任务是监测汽轮机运行的主要参数,在某个参数超过安全定值时,该系统通过电磁阀自动泄去汽机危急遮断油,关闭汽机全部蒸汽进汽阀门,实现紧急停机,从而保证机组的安全。
鉴于ets的特殊地位,对est的设计提出了很高的要求。
这套系统的拒动和误动,都会严重影响着电厂的安全运行。
正因为这个原因,电厂和制造厂对该系统是慎之又慎。
目前,一些国产200mw机组汽机保护装置是传统型的,以继电器为主搭建,存在可靠性不够高、保护逻辑修改麻烦、不能与主控制系统构成有效的通信连接等问题。
近年来,随着计算机技术的发展,ets的设计逐步发展到plc。
plc(programmable logiccontroller)是可编程序控制器,是以计算机技术为核心的工业控制装置,因其具有可靠性高、处理速度快、逻辑修改方便等特点,在我国发电厂汽机本体保护中得到了广泛的应用。
2、传统型ets的不足(1)继电器的质量影响到保护装置的可靠性,由于继电器存在接触不良、剩磁、触点老化和配接线质量等问题,严重影响着可靠性,容易引起拒动和误动。
(2)继电器动作以后会马上复位,对于分析故障、查找动作原因比较困难,不能提供可靠的证据。
(3)保护装置在线试验受到限制,必须短接或解线才能进行试验。
(4)系统的灵活性受到一定的限制,一旦配制完成,要修改逻辑,只有通过重新增加继电器和修改配线才能实现,由于程序复杂,需新增很多继电器。
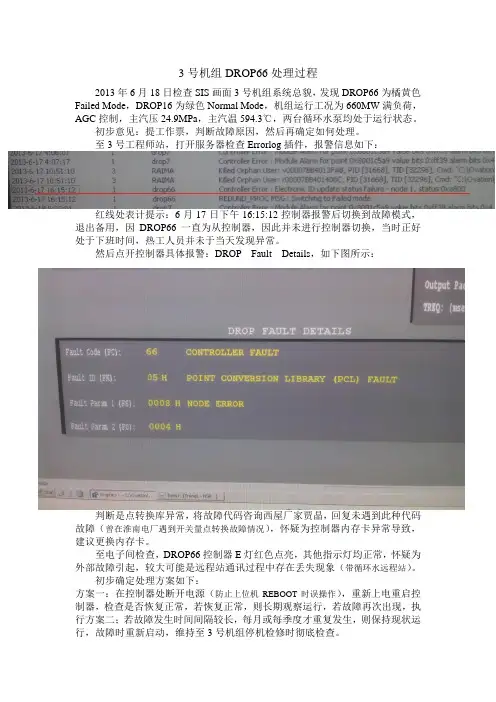
3号机组DROP66处理过程2013年6月18日检查SIS画面3号机组系统总貌,发现DROP66为橘黄色Failed Mode,DROP16为绿色Normal Mode,机组运行工况为660MW满负荷,AGC控制,主汽压24.9MPa,主汽温594.3℃,两台循环水泵均处于运行状态。
初步意见:提工作票,判断故障原因,然后再确定如何处理。
至3号工程师站,打开服务器检查Errorlog插件,报警信息如下:红线处表计提示:6月17日下午16:15:12控制器报警后切换到故障模式,退出备用,因DROP66一直为从控制器,因此并未进行控制器切换,当时正好处于下班时间,热工人员并未于当天发现异常。
然后点开控制器具体报警:DROP Fault Details,如下图所示:判断是点转换库异常,将故障代码咨询西屋厂家贾晶,回复未遇到此种代码故障(曾在淮南电厂遇到开关量点转换故障情况),怀疑为控制器内存卡异常导致,建议更换内存卡。
至电子间检查,DROP66控制器E灯红色点亮,其他指示灯均正常,怀疑为外部故障引起,较大可能是远程站通讯过程中存在丢失现象(带循环水远程站)。
初步确定处理方案如下:方案一:在控制器处断开电源(防止上位机REBOOT时误操作),重新上电重启控制器,检查是否恢复正常,若恢复正常,则长期观察运行,若故障再次出现,执行方案二;若故障发生时间间隔较长,每月或每季度才重复发生,则保持现状运行,故障时重新启动,维持至3号机组停机检修时彻底检查。
方案二:考虑16/66控制器所带设备,制定处理方案,逐条核对可行性,该对控制器主要附带:1)两台循环水泵及出口液控蝶阀(可切至就地,由运行人员就地操作,该问题可解决);2)所有抽气逆止门,1、2、3抽影响到高加汽侧,5、6抽影响相对小,4抽直接影响汽泵,存在非停可能,需制定详细方案;3)汽机本体各类疏水阀,需参考汽机专业、运行人员意见考虑到方案二需慎重处理,机组负荷较高,因此列为第二选择。
汽轮机控制系统( DEH)设计及操作使用说明上海汽轮机有限企业300MW 机组 DEH 系统说明书DEH 系统使用的是西屋企业的OVATION型集散控制系统。
其先进性在于分别的构造和鉴于微办理器的控制,这两大特色加上冗余使得系统在拥有更强的办理能力的同时提升了靠谱性。
100MB 带宽的高速以太网的高速公路通信使各个控制器之间互相隔绝,又能够通过它来互相联系,能够说是整套系统的一个核心。
系统的主要构成包括:工程师站、操作员站、控制器等。
一、DEH 系统功能汽轮机组采纳由纯电调解液压伺服系统构成的数字式电液控制系统 (DEH) ,供应了以下几种运转方式:操作员自动控制汽轮机自启动自同期运转DCS 远控运转手动控制经过这几种运转方式,能够实现汽轮机控制的基本功能如转速控制、功率控制、抽汽控制功能。
1 .基本控制功能工程师站和操作员站的画面是主机控制接口,它是用来传达指令给汽轮机和获取运转所需的资料。
翻开CUSTOM GRAPHIC 窗口,运转人员能够用鼠标点击对应的键来调出相应的图像。
也能够翻开DATA ANALYSIS AND MAINTENANCE窗口,选用OPERATOR STATION PROGRAMS按钮,在OPERATOR STATION PROGRAMS 菜单上采纳 DIAGRAM DISPLAY 按钮,在 DISPLAY DIAGRAM 菜单上采纳所需的图号,再按 DISPLAY 按钮,就能调出所需的图形。
基本系统图像全部基本系统图像将机组运转的重要资料供应给运行人员。
屏幕分红不一样的地区,包含一般信息,页面特定信息。
一般信息控制方式—用来表示机组目前全部的控制方式。
这些方式分操作员自动、汽轮机自动控制、遥控、以及手动同步和自动同步。
旁路方式-DEH供应一个旁路接口,能够调理再热调理汽阀,以便与外面的旁路控制器相当。
运转人员可依据实质状况选择带旁路运转方式和不带旁路运转方式。
控制设定-主要显示实质值、设定值、目标值和速率。
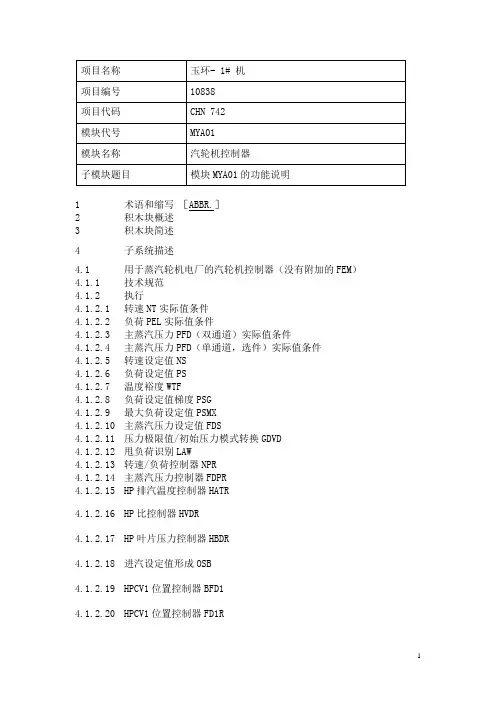
1 术语和缩写[ABBR.]2 积木块概述3 积木块简述4 子系统描述4.1 用于蒸汽轮机电厂的汽轮机控制器(没有附加的FEM)4.1.1 技术规范4.1.2 执行4.1.2.1 转速NT实际值条件4.1.2.2 负荷PEL实际值条件4.1.2.3 主蒸汽压力PFD(双通道)实际值条件4.1.2.4 主蒸汽压力PFD(单通道,选件)实际值条件4.1.2.5 转速设定值NS4.1.2.6 负荷设定值PS4.1.2.7 温度裕度WTF4.1.2.8 负荷设定值梯度PSG4.1.2.9 最大负荷设定值PSMX4.1.2.10 主蒸汽压力设定值FDS4.1.2.11 压力极限值/初始压力模式转换GDVD4.1.2.12 甩负荷识别LAW4.1.2.13 转速/负荷控制器NPR4.1.2.14 主蒸汽压力控制器FDPR4.1.2.15 HP排汽温度控制器HATR4.1.2.16 HP比控制器HVDR4.1.2.17 HP叶片压力控制器HBDR4.1.2.18 进汽设定值形成OSB4.1.2.19 HPCV1位置控制器BFD14.1.2.20 HPCV1位置控制器FD1R4.1.2.21 HPCV2位置控制器BFD24.1.2.22 HPCV2位置控制器FD2R4.1.2.23 HPCV3位置控制器BFD3(选件)4.1.2.24 HPCV3位置控制器FD3R(选件)4.1.2.25 HPCV4位置控制器BFD4(选件)4.1.2.26 HPCV4位置控制器FD4R(选件)4.1.2.27 OCV(OCV)位置控制器BUEL(选件)4.1.2.28 OCV位置控制器UELR(选件)4.1.2.29 IPCV1位置控制器 BAF14.1.2.30 IPCV1位置控制器AF1R4.1.2.31 IPCV 2位置控制器 BAF24.1.2.32 IPCV 2位置控制器 AF2R4.1.2.33 CBCV(连通管蝶阀)位置控制器BSTK(选件)4.1.2.34 CBCV位置控制器STKR(选件)4.1.3 操作员控制及监视4.1.3.1 信号4.1.3.2 运行要素4.2 首-末站1 术语和缩写(Abbr.)A1MV1A AF1脱扣电磁阀1已脱扣A1MV2A AF1脱扣电磁阀2已脱扣A2MV1A AF2脱扣电磁阀1已脱扣A2MV2A AF2脱扣电磁阀2已脱扣AF1 IPCV 1AF1A IPCV 1开启AF1AP IPCV 1运行点AF1KP IPCV 1位置控制器增益AF1MN IPCV 1位置控制器输出到最小AF1MX IPCV 1位置控制器输出到最大AF1OB IPCV 1进汽开始AF1OE IPCV 1进汽结束AF1OK IPCV 1关闭时间测量OKAF1R IPCV 1位置控制器AF1RA IPCV 1位置控制器伺服阀控制AF1Z IPCV 1关闭AF2 IPCV 2AF2A IPCV 2开启AF2AP IPCV 2运行点AF2KP IPCV 2位置控制器增益AF2MN IPCV 2位置控制器输出到最小AF2MX IPCV 2位置控制器输出到最大AF2OB IPCV 2进汽开始AF2OE IPCV 2进汽结束AF2OK IPCV 2关闭时间测量OKAF2R IPCV 2位置控制器AF2RA IPCV 2位置控制器伺服阀控制AF2Z IPCV 2关闭AFOB IPCV 2进汽开始AFOE IPCV 2进汽结束AFS1A IPESV1(中压主汽门)开启AFS1OK IPESV1关闭时间测量OKAFS1Z IPESV1关闭AFS2A IPESV2关闭AFS2OK 中压蒸汽ESV 2关闭时间测算OK AFS2Z 中压蒸汽ESV 2关闭ANABWT TSE启动退出ANFABR 退出启动ASGAF1 IPCV1快速有效指示ASGAF2 IPCV2快速有效指示ASGFD1 IPCV1快速有效指示ASGFD2 IPCV2快速有效指示ASGFD3 IPCV3快速有效指示ASGFD4 IPCV4快速有效指示ASGUEL OCV快速有效指示ASGZD1 LPIDCV1快速有效指示ASGZD2 LPIDCV2快速有效指示AUST 自动关闭AUSTRM 自动关闭核对信号AVA1M1 AF1遮断电磁阀1不符AVA1M2 AF1遮断电磁阀2不符AVA1MV AF1遮断电磁阀不符AVA2M1 AF2遮断电磁阀1不符AVA2M2 AF2遮断电磁阀2 不符AVA2MV AF2遮断电磁阀不符AVF1M1 FD1遮断电磁阀1不符AVF1M2 FD1遮断电磁阀2不符AVF1MV FD1遮断电磁阀不符AVF2M1 FD2遮断电磁阀1不符AVF2M2 FD2遮断电磁阀2不符AVF2MV FD2遮断电磁阀不符AVPFD 主蒸汽压力测量结果不符AVPHZ 中压蒸汽压力测量结果不符AVPZD 低压补汽压力测量结果不符AVZ1M1 ZD1遮断电磁阀1不符AVZIM2 ZD1遮断电磁阀2不符AVZ1MV ZD1遮断电磁阀1不符BAF1 IPCV1开度限值BAF1IE IPCV1限制功能激活BAF1NA IPCV1以正常梯度开启的命令BAF1SA IPCV1快速打开的命令BAF1T IPCV1阀位限制的时间参数BAF1TS IPCV1 阀位限制的快速时间参数BAF1V IPCV1延时的阀位限值BAF1Z 校核IPCV1关闭的阀位限制BAF1ZU IPCV1关闭命令BAF2 IPCV2开度限值BAF2IE IPCV2限制功能有效BAF2NA IPCV2以正常梯度开启的命令BAF2SA IPCV2快速打开的命令BAF2T IPCV2阀位限制的时间参数BAF2TS IPCV2 阀位限制的快速时间参数BAF2V IPCV2延时的阀位限值BAF2Z 校核IPCV2关闭的阀位限制BAF2ZU IPCV2关闭命令BEGME 测量范围端限制功能BEGRIE 限制功能有效BFD1 HPCV1开度限值BFD1IE HPCV1限制功能有效BFD1NA HPCV1以正常梯度开启的命令BFD1SA HPCV1快速打开的命令BFD1T HPCV1阀位限制的时间参数BFD1TS HPCV1阀位限制的快速时间参数BFD1V HPCV1延时的阀位限值BFD1Z 校核HPCV1关闭的阀位限制BFD1ZU HPCV1关闭命令BFD2 HPCV2开度限值BFD2NA HPCV2以正常梯度开启的命令BFD2SA HPCV2快速打开的命令BFD2T HPCV2阀位限制的时间参数BFD2TS HPCV2阀位限制的快速时间参数BFD2V HPCV2延时的阀位限值BFD2Z 校核HPCV2关闭的阀位限制BFD2ZU HPCV2关闭命令BFD3 HPCV3开度限值BFD3IE HPCV3限制功能有效BFD3NA HPCV3以正常梯度开启的命令BFD3SA HPCV3快速打开的命令BFD3T HPCV3阀位限制的时间参数BFD3TS HPCV3阀位限制的快速时间参数BFD3V HPCV3延时的阀位限值BFD3Z 校核HPCV3关闭的阀位限制BFD3ZU HPCV3关闭命令BFD4 HPCV4开度限值BFD4IE HPCV4限制功能有效BFD4NA HPCV4以正常梯度开启的命令BFD4SA HPCV4快速打开的命令BFD4T HPCV4阀位限制的时间参数BFD4TS HPCV4阀位限制的快速时间参数BFD4V HPCV4延时的阀位限值BFD4Z 校核HPCV4关闭的阀位限制BFD4ZU HPCV4关闭命令BLE 机组的协调级BRAF1 IPCV1位置检测器故障BRAF2 IPCV2位置检测器故障BRAFS1 IPESV1(ESV)位置检测器故障BRAFS2 IPESV2位置检测器故障BRFD1 HPCV1位置检测器故障BRFD2 HPCV2位置检测器故障BRFD3 HPCV2位置检测器故障BRFD4 HPCV 4位置检测器故障BRFDS1 HPESV 1位置检测器故障BRFDS2 HPESV 2位置检测器故障BRFDS3 HPESV 3位置检测器故障BRFDS4 HPESV 4位置检测器故障BRSTK CBCV位置检测器故障BRUEL OCV位置检测器故障BRZD1 LPIDCV1位置检测器故障BRZD2 LPIDCV2位置检测器故障BSTK CBCV阀位限值BSTKT CBCV阀位限制的时间参数BSTKV CBCV延时的阀位限值BUEL OCV开度限值BUELIE OCV限制功能有效BUELNA OCV以正常梯度启动(OPEN)的命令BUELT OCV阀位限制的时间参数BUELTS OCV阀位限制的快速时间参数BUELV OCV延时的阀位限值BUELZ 校核OCV关闭(CLOSED)的阀位限制BZD1 LPIDCV1开度限值BZD1IE LPIDCV1限制功能有效BZD1NA LPIDCV以正常梯度启动(OPEN)的命令BZD1SA LPIDCV1以正常梯度启动的命令BZD1T LPIDCV1阀位限制的时间参数BZD1TS LPIDCV1阀位限制的快速时间参数BZD1V LPIDCV1延时的阀位限值BZD1ZU LPIDCV1关闭命令BZD2 LPIDCV2开度限值BZD2IE LPIDCV2功能限制BZD2NA LPIDCV2以正常梯度启动的命令BZD2SA LPIDCV2以快梯度启动的命令BZD2T LPIDCV2阀位限制的时间参数BZD2TS LPIDCV2阀位限制的快速时间参数BZD2V LPIDCV2延时的阀位限值BZD2ZU LPIDCV2关闭命令DGD 压力限制点Δ值DNGD GT(燃机)和ST(汽机)转速差DNKUPA 离合器脱开转速Δ限值DNKUPE 离合器啮合转速Δ限值DNTGR 转速偏差太大控制DRNIE 蒸汽的纯度未达标DTS 透平主控制程序DTSZ 汽轮机保护系统DVD 初试压力模式Δ值EHAS 电液油动机控制装置ESV 主汽门EYR 控制器输出固定值F1MV1A FD1遮断电磁阀1遮断F1MV2A FD1遮断电磁阀2遮断F2MVIA FD2遮断电磁阀1遮断F2MV2A FD2遮断电磁阀2遮断FBMX 最大允许裕度FD1 HPCV1FD1AP HPCV1运行点FD1KP HPCV1阀位控制器增益FD1MN HPCV1控制器输出到最小FD1MX HPCV1控制器输出到最大FD1OB HPCV1进汽开始FD1OE HPCV1进汽结束FD1OK HPCV1关闭时间测量OKFD1R HPCV1阀位控制器FD1RA HPCV1阀位控制器伺服阀控制FD1Z HPCV1关闭FD2 HPCV2FD2A HPCV2启动FD2AP HPCV2运行点FD2KP HPCV2阀位控制器增益FD2MN HPCV2控制器输出到最小FD2MX HPCV2控制器输出到最大FD2OB HP进汽控制阀2进汽开始FD2OE HP进汽控制阀2进汽结束FD2OK HPCV2关闭时间测量OK FD2R HPCV2阀位控制器FD2RA HPCV2阀位控制器伺服阀控制FD2Z HPCV2关闭FD3 HPCV3FD3A HPCV3启动FD3AP HPCV3运行点FD3KP HPCV3阀位控制器增益FD3MN HPCV3控制器输出到最小FD3MX HPCV2控制器输出到最大FD3OB HPCV3进汽开始FD3OE HPCV3进汽结束FD3OK HPCV3关闭时间测量OKFD3R HPCV3阀位控制器FD3Z HPCV3关闭FD4 HPCV4FD4A HPCV4启动FD4AP HPCV4运行点FD4KP HPCV4阀位控制器增益FD4MN HPCV4控制器输出到最小FD4MX HPCV4控制器输出到最大FD4OB HPCV4进汽开始FD4OE HPCV4进汽结束FD4OK HPCV4关闭时间测量OKFD4R HPCV4阀位控制器FDDYVE HPCV ON动态前馈控制FDPR 主蒸汽压力控制器FDPRIE 主蒸汽压力控制器有效FDPRKP 主蒸汽压力控制器增益FDPRTN 主蒸汽压力控制器积分时间FDS 主蒸汽压力设定值FDS1A HP ESV1(ESV)开启FDS1OK HP ESV1关闭时间测量OKFDS1Z HP ESV1关闭FDS2A HP ESV2开启FDS2OK HP ESV2 关闭时间测量OKFDS2Z HP ESV2关闭FDS3A HP ESV3开启FDS3OK HP ESV3 关闭时间测量OKFDS3Z HP ESV3关闭FDS4A HP ESV4开启FDS4OK HP ESV4关闭时间测量OKFDS4Z HP ESV4关闭FDSFG 主蒸汽压力设定值有效FDSV 使主蒸汽压力设定值延迟FDSVG 延迟主蒸汽压力设定值梯度FDSVK 校准的延迟主蒸汽压力设定值FDSX 外部主蒸汽压力设定值FDSXA 外部主蒸汽压力设定值OFFFDSXAB 外部主蒸汽压力设定值OFF命令FDSXE 外部主蒸汽压力设定值作用FDSXEB 外部主蒸汽压力设定值ON命令FDXW 主蒸汽压力控制偏差FGDGR 喷嘴组控制监控运作FGOSU 使阀位设定值切换有效FGSAK 使透平快速冷却有效FGSWF 使设定值控制有效FGUEN 使超速脱扣试验能有效GDB 压力限制模式ON命令GDE 限位压力模式ONGDER 限制压力到达GDNGD 燃机和汽轮机速度差限制值GDNT 转速偏差控制限值GDVD 限制压力/初试压力模式转换GFE 频率限制影响GLSE 发电机断路器和电网上断路器ONGLSEV 发电机断路器和电网上断路器ON,延迟GNSR 超速试验转速设定值梯度RESET(复置)命令GNTGRD 转速梯度限值GP2EB 两倍厂用电的负荷限制值GPBAU 运行模式转换输出限值GPLSP 甩负荷限制值确认GPNEG 负负荷限值GSA 发电机断路器OFFGSE 发电机断路器ONGSP1A 临界转速范围1开始限值GSP1E 临界转速范围1结束限值GSP2A 临界转速范围2开始限值GSP2E 临界转速范围2结束限值GTOB 燃机控制器进气开始中位设定值GTOE 燃机控制器进气结束中位设定值GTTD 燃机控制器微分时间常数GWGDER 压力限制限值达到GWSTOV HPCV故障限值GYRKOR 校正的进汽限值HAF1 IPCV1阀位实际值HAF2 IPCV2阀位实际值HAFS1 IPESV 1阀位实际值KAFS2 IPESV 2阀位实际值HAT HP排汽温度实际值HATFG 使HP排汽温度实际值有效HATR HP排汽蒸汽温度控制器HATRAB HP排汽温度控制器OFF命令HATREB HP排汽温度控制器ON命令HATRIE 使HP排汽温度控制器有效HATRKP 使HP排汽温度控制器增益HATRTN HP排汽温度控制器积分时间HATRTS HP排汽温度控制器无扰切换时间常数HATS HP排汽温度设定值HATXD HP排汽温度控制偏差HBD HP叶片压力实际值HBDFG 使HP叶片压力实际值有效HBDR HP叶片压力控制器HBDREB HP叶片压力控制器ON命令HBDRIE 使HP叶片压力控制器有效HBDRKP 使HP叶片压力控制器增益HBDRTN HP叶片压力控制器积分时间HBDRTS HP叶片压力控制器无扰切换时间常数HBDS HP叶片压力设定值HBDXD HP叶片压力控制偏差HDU HP旁路站HER 加热抽汽(区域供热或过程加热)压力控制器HEREB 加热抽汽(区域供热或过程加热)压力控制器ON命令HERIE 加热抽汽(区域供热或过程加热)压力控制器有效HERS 加热抽汽(区域供热或过程加热)压力控制器设定值HFD1 HPCV1实际值HFD2 HPCV2阀位实际值HFD3 HPCV3阀位实际值HFD4 HPCV4阀位实际值HFDS1 HP ESV1阀位实际值HFDS2 HP ESV2阀位实际值HFDS3 HP ESV3阀位实际值HFDS4 HP ESV4阀位实际值HP HPHSGT 燃机控制器中心阀位设定值HSGTIE 燃机控制器中心阀位设定值有效HSTK 连通管蝶形控制阀阀位实际值HUEL OCV阀位实际值HVDFG 使HP压比实际值有效HVDR HP压比控制器HVDRAB HP压比控制器OFF命令HVDREB HP压比控制器ONHVDRIE HP压比控制器有效HVDRKP HP压比控制器增益HVDRTN HP压比控制器积分时间HVDRTS HP压比控制器无扰切换时间常数HVDXD HP比控制偏差HZD1 LP进汽蝶阀1实际阀位HZD2 LP进汽蝶阀2实际阀位HZPR 热再热蒸汽压力控制器HZPRIE 热再热蒸汽压力控制器有效HZS 热再热蒸汽压力设定值HZSV 热再热蒸汽压力设定值延迟HZSVG 热再热蒸汽压力设定值梯度HZSX 外部热再热蒸汽压力设定值HZSXA 外部热再热蒸汽压力设定值OFFHZSXAB 外部热再热蒸汽压力设定值OFF命令HZSXE 外部热再热蒸汽压力设定值ONHZSXEB 外部热再热蒸汽压力设定值ON命令HZUE 热再热IP 中压IVFG 使实际值等焓调整控制器有效IVR 等焓调整控制器IVRAB 等焓调整控制器OFF命令IVREB 等焓调整控制器ON命令IVRIE 等焓调整控制器有效IVRKP 等焓调整控制器增益IVRTN 等焓调整控制器积分时间IVRTS 等焓调整控制器无扰切换时间常数IVSB 等焓调整控制器禁止命令IVXD 等焓调整控制偏差KAF1 IPCV1设定值校正KAF2 IPCV2设定值校正KANL 负荷能力KANLFG 使负荷能力有效KANLIE 负荷能力有效KATFD 排汽温度控制器对HPCV控制增益KDN 转速控制器比例前馈部分KFD1 HPCV1设定值校正KFD2 HPCV2设定值校正KGT 燃机控制器阀位设定值增益KOS 进气控制器比例前馈部分KPS 负荷控制器比例前馈部分KU 电网瞬时中断KUPA 离合器脱开KUPE 离合器啮合KVRFD HPCV控制器校正增益KZD1 LPIDCV1阀位设定值校正KZD2 LPIDCV2阀位设定值校正KZUE 冷再热LALBNR 带有转速控制器的负荷运行期间甩负荷LAW 甩负荷识别LAWS 汽轮机保护系统的甩负荷信号LB 带负荷运行LBNR 有转速控制器的带负荷运行LBNRB 转速控制器ON时命令负荷运行LBOR 进汽控制器负荷运行LBORB 进汽控制器ON时命令负荷运行LBPR 负荷控制器的负荷运行LBPRB 负荷控制器ON时命令负荷运行LP 低压LSE 电网断器ONNNOM 额定转速NOR 转速/ 进汽控制器NORTN 转速/进汽控制器积分时间NORTNS 转速/进汽控制器的快速积分时间NPR 转速/负荷控制器NPRIE 转速/进汽控制器有效NPPTN 转速/负荷控制器的积分时间NPRTNS 转速/负荷控制器的快速积分时间NS 转速设定值NSABGL 转速设定值匹配NSGP 超速脱扣试验转速设定值梯度NSNF 转速跟踪设定值NSOG 转速设定值上限NSS 超速脱扣试验转速设定值NSUG 转速设定值下限NSV 延迟转速设定值NSVG 延迟转速设定值梯度NSVGSY 转速设定值同步梯度NSVH 转速上升设定值控制NSWART 转速设定值保持NSYN 同步转速设定值NSYNC 将转速设定值设定为同步转速的指令NT 透平转速NT1 转速实际值——信号1NT2 转速实际值——信号2NT3 转速实际值——信号3NTASP 透平转速至临界转速范围之外NTGRKL 转速梯度太小NTGT GT转速实际值NTGTMA GT转速至测量范围起点以上的NTRIE 转速控制器有效NWART 保持转速OFB 上裕度OFBN 转速上裕度OFBO 进汽上裕度OFBP 负荷上裕度OGE 上限达到OM 运行和监视ORIE 进汽控制器有效OS 进汽设定值OS100 进汽设定值为100%OS105 进汽设定值为105%OS95 进汽设定值为95%OSABGL 进汽设定值匹配OSAF IPCV进汽设定值OSAF1 IPCV1进汽设定值OSAF2 IPCV2进汽设定值OSAFS 存储IPCV阀位设定值OSB 进汽设定值形成OSFD1 HPCV1进汽设定值OSFD2 HPCV2进汽设定值OSFD3 HPCV3进汽设定值OSFD4 HPCV4进汽设定值OSG 进汽设定值梯度OSGA 进汽设定值梯度OFF OSGAB 进汽设定值梯度OFF OSGE 进汽设定值梯度ON OSGEB 命令进汽设定值梯度ON OSGI 内进汽设定值梯度OSGV 延迟进汽梯度OSNF 跟踪进汽设定值OSSTK CBCV进汽设定值OSUEL OCV进汽设定值OSUG 进汽设定值下限OSV 延迟进汽设定值OSVG 延迟进汽设定值梯度OSVLH 进汽设定值爬升OSX 外进汽设定值OSXE 外进汽设定值OSZD LPIDCV进汽设定值PEL 负荷实际值PEL1 负荷1实际值PEL2 负荷2实际值PFD 主蒸汽压力实际值PFD1 主蒸汽压力1实际值PFD2 主蒸汽压力2实际值PFDK 校正的主蒸汽压力PHZ 热再热蒸汽压力PHZ1 热再热蒸汽压力1PHZ2 热再热蒸汽压力2 PIPEL 负荷设定值压力校正系数PMDBS IP叶片上游压力PMIN 最小负荷PNOM 额定负荷PRAF1 试验IPCV1PRAF2 试验IPCV2PRFD1 试验HPCV1PRFD2 试验HPCV2PRFD3 试验HPCV3PRFD4 试验HPCV4PRIE 负荷控制器有效PRUEL 试验OCVPRZD1 试验LPIDCV1PRZD2 试验LPIDCV2PS 负荷设定值PSABGL 负荷设定值匹配PSB 负荷设定值限制PSF 频率对负荷设定值的影响PSFA 负荷设定值/基本频率影响OFF PSFAB 命令负荷设定值/基本频率影响OFF PSFE 负荷设定值/基本频率影响ON PSFEB 命令负荷设定值/基本频率影响ON PSG 负荷设定值梯度PSGA 负荷设定值梯度OFFPSGAB 命令负荷设定值梯度OFFPSGE 负荷设定值梯度ONPSGEB 命令负荷设定值梯度ONPSG1 内部负荷设定值梯度PSGV 延迟负荷梯度PSKE 锅炉控制负荷设定值PSMX 最大负荷设定值PSMXIE 最大负荷设定值有效PSMXV 最大延迟负荷设定值PSNF 跟踪负荷设定值PSS 超速脱扣试验ON命令PSSE 超速脱扣-试验ONPSUG 负荷设定值下限PSV 延迟负荷设定值PSVG 延迟负荷设定值梯度PSVLH 负荷设定值上升PSW 有效的限负荷设定值PSX 外负荷设定值PSXAB 外部失效负荷设定值PSXE 外部负荷设定值开始PZD 低压补汽压力实际值PZD1 低压补汽压力1实际值PZD2 低压补汽压力2实际值POS105 进汽设定值反馈信号为105%RSS 超速脱扣试验OFF命令RSSE 超速脱扣试验OFFSA11N1 AF1脱扣电磁阀1(冗余1)单个脱扣SA11N3 AF1脱扣电磁阀1(冗余2)单个脱扣SA12N1 AF1脱扣电磁阀2(冗余1)单个脱扣SA12N3 AF1脱扣电磁阀2(冗余2)单个脱扣SA21N2 AF2脱扣电磁阀1(冗余1)单个脱扣SA21N4 AF2脱扣电磁阀1(冗余2)单个脱扣SA22N2 AF2脱扣电磁阀2(冗余1)单个脱扣SA22N4 AF2脱扣电磁阀2(冗余2)单个脱扣SAKAF1 IPCV1快速冷却SAKAF2 IPCV2快速冷却SAKFD1 HPCV1快速冷却SAKFD2 HPCV2快速冷却SAKFD3 HPCV3快速冷却SAKFD4 HPCV4快速冷却SAKSTK CBCV快速冷却SASAF1 IPCV1运行点故障SASAF2 IPCV2运行点故障SASFD1 HPCV1运行点故障SASFD2 HPCV2运行点故障SASFD3 HPCV3运行点故障SASFD4 HPCV4运行点故障SASSTK CBCV运行点故障SASUEL OCV运行点故障SASZD1 LPIDCV1运行点故障SASZD2 LPIDCV2运行点故障SB 设置命令SBAF1 IPCV1阀位测量故障SBAF2 IPCV2阀位测量故障SBFD1 HPCV1阀位测量故障SBFD2 HPCV2阀位测量故障SBFD3 HPCV3阀位测量故障SBFD4 HPCV4阀位测量故障SBSTK CBCV阀位测量故障SBUEL OCV阀位测量故障SBZD1 LPIDCV1开位测量故障SBZD2 LPIDCV2开位测量故障SF11N1 FD1脱扣电磁阀1(冗余1)单个脱扣SF11N3 FD1脱扣电磁阀1(冗余2)单个脱扣SF12N1 FD1脱扣电磁阀2(冗余1)单个脱扣SF12N3 FD1脱扣电磁阀2(冗余2)单个脱扣SF21N2 FD2脱扣电磁阀1(冗余1)单个脱扣SF21N4 FD2脱扣电磁阀1(冗余2)单个脱扣SF22N2 FD2脱扣电磁阀2(冗余1)单个脱扣SF22N4 FD2脱扣电磁阀2(冗余2)单个脱扣SGAF1 IPCV1快速动作有效SGAF1N IPCV1快速动作,无效SGAF2 IPCV2快速动作有效SGAF2N IPCV2快速动作,无效SGFD1 HPCV1快速动作有效SGFE1N HPCV1快速动作有效,无效SGFD2 HPCV2快速动作有效SGFD2N HPCV2快速动作,无效SGFD3 HPCV3快速动作有效SGFD3N HPCV3快速动作,无效SGFD4 HPCV4快速动作有效SGFD4N HPCV4快速动作,无效SGUEL OCV快速动作有效SGUELN OCV快速动作,无效SGZD1 LPIDCV1快速动作有效SGZD1N LPIDCV1快速动作,无效SGZD2 LPIDCV2快速动作有效SGZD2N LPIDCV2快速动作,无效SHWAF1 IPCV1硬件输出故障SHWAF2 IPCV2硬件输出故障SHWFD1 HPCV1硬件输出故障SHWFD2 HPCV2硬件输出故障SHWFD3 HPCV3硬件输出故障SHWFD4 HPCV4硬件输出故障SHWSTK CBCV硬件输出故障SHWUEL OCV硬件输出故障SHWZD1 LPIDCV1硬件输出故障SHWZD2 LPIDCV1硬件输出故障SPBAF1 IPCV1阀位限制禁止手动设定命令SPBAF2 IPCV2阀位限制禁止手动设定命令SPBFD1 HPCV1阀位限制禁止手动设定命令SPBFD2 HPCV2阀位限制禁止手动设定命令SPBFD3 HPCV3阀位限制禁止手动设定命令SPBFD4 HPCV4阀位限制禁止手动设定命令SPBUEL OCV阀位限制禁止手动设定命令SPBZD1 LPIDCV1阀位限制禁止手动设定命令SPBZD2 LPIDCV2阀位限制禁止手动设定命令SPKU 禁止电网瞬态中断SPPSK 禁止锅炉负荷控制设定值SPSWF 禁止设定值控制SS 汽轮机遮断STAF1R IPCV1禁止运行点STAF2R IPCV2禁止运行点STATHF 过频率不变率STATLF 低频率不变率STATNR 转速控制器不变率STFD1 HPCV 1故障STFD1M HPCV1故障状态信号STFD1R HPCV1禁止运行点STFD2 HPCV2故障STFD2M HPCV2故障状态信号STFD2R HPCV2禁止运行点STFD3 HPCV3故障STFD3M HPCV3故障状态信号STFD3R HPCV3禁止运行点STFD4 HPCV4故障STFD4M HPCV4故障状态信号STFD4R HPCV4禁止运行点STFDSX 外部主蒸汽压力设定值故障STGS 发电机断路器故障STHAT HP排汽温度实际值故障STHBD HP叶片压力实际值故障STHVDR HP比实际值故障STILL 汽轮机停机STIV 等焓调整实际值故障STK CBCVSTKAB CBCV关闭命令(在100%开度下值冻结)STKANL 负荷能力故障STKAP CBCV运行点STKKP CBCV阀位控制器增益STKMN CBCV控制器输出最小STKMX CBCV控制器输出最大STKOB CBCV进汽开始STKOE CBCV进汽结束STKR CBCV阀位控制器STKRA CBCV阀位控制器伺服阀控制STLS 电网断路器故障STNT1 转速-信号1实际值故障STNT2 转速-信号2实际值故障STNT3 转速-信号3实际值故障STNTGT GT转速实际值故障STPEL 负荷测量故障STPEL1 负荷测量1故障STPEL2 负荷测量2故障STPFD 主汽压力测量故障STPFD1 主汽压力测量1故障STPFD2 主汽压力测量2故障STPHZ 热再热压力测量故障STPHZ1 热再热压力测量1故障STPHZ2 热再热压力测量2故障STPNS 转速设定值控制停止STPSWF 设定值控制停止STPZD 低压补汽压力测量故障STPZD1 低压补汽压力测量1故障STPZD2 低压补汽压力测量2故障STSTKR 连通管蝶形控制阀运行点禁止STUELR OCV运行点禁止STZD1R LPIDCV1运行点禁止STZD2R LPIDCV2运行点禁止SVNS 转速设定值设定SVOS 进汽设定值设定SVPS 负荷设定值设定SWFQ 认可设定值控制SYH 同步命令HIGHERSYR 模拟控制器输出SYT 同步命令LOWERSZ11N1 ZD1脱扣电磁阀1(冗余1)单个脱扣SZ11N3 ZD1脱扣电磁阀1(冗余2)单个脱扣SZ12N1 ZD1脱扣电磁阀2(冗余1)单个脱扣SZ12N3 ZD1脱扣电磁阀2(冗余2)单个脱扣TAB 透平启动和升程限制器TAB50 透平启动和升程限制器设置50% TABG0 透平启动和升程限制器设置0 % TABGNF 跟踪透平启动和升程限制器的限值TABIE 透平启动和升程限制器有效TABMA 透平启动和升程限制器,测量范围开始TABME 透平启动和升程限制器,测量范围结束TENTL 透平降负荷TKU 瞬态电网中断时间参数TLAW 甩负荷识别时间参数TLR 透平应力评估+寿命消耗TPA 透平自动试验器TSE 透平应力评估TSPKU 禁止瞬态电网中断时间参数TUOSAF IPCV寿命设定值切换时间TVSTOV HPCV故障延时时间UEL OCVUELAP OCV运行点UELKP OCV阀位控制器增益UELOB OCV进汽开始UELOE OCV进汽结束UELR OCV阀位控制器URLRA OCV阀位控制器伺服阀控制UELZ OCV阀位限制关闭校核UFB 低裕度UFBN 转速低裕度UFBO 进汽低裕度UFBP 负荷低裕度VDB 初始压力模式ON命令VDE 初始压力模式ONVGBAF1 IPCV1阀位限制手动设定VGBAF2 IPCV2阀位限制手动设定VGBFD1 HPCV1阀位限制手动设定VGBFD2 HPCV2阀位限制手动设定VGBFD3 HPCV3阀位限制手动设定VGBFD4 HPCV4阀位限制手动设定VGBSTK CBCV阀位限制手动设定VGBZD1 LPIDCV1阀位限制手动设定VGBZD2 LPIDCV2阀位限制手动设定VGFDS 主蒸汽压力设定值手动设定VGHZS 热再热蒸汽压力设定值手动设定VGNS 转速设定值手动设定VGOS 进汽设定值手动设定VGOSG 进汽设定值梯度手动设定VGPS 负荷设定值手动设定VGPSG 负荷设定值梯度手动设定VGPSMX 外部最大负荷设定值手动设定VGZDS LP补汽压力设定值手动设定WTA TSE影响OFFWTAB 命令TSE影响OFFWTE TSE影响ONWTEB 命令TSE影响ONWTF 温度裕度WTG 透平应力评估(TSE)WTNR TSE限制对转速控制器上有效WTO 增负荷温度裕度WTOR TSE限制在进汽控制器上有效WTPR TSE限制在负荷控制器上有效WTS TSE故障WTST TSE故障,存储WTU 负荷下降温度裕度Y1AF1 IPCV1阀位控制器硬件输出Y1AF1R IPCV1控制器输出信号1读回Y1AF2 IPCV2阀位控制器硬件输出1Y1AF2R IPCV2控制器输出信号1读回Y1FD1 HPCV1阀位控制器硬件输出1Y1FD1R HPCV1控制器输出信号1读回Y1FD2 HPCV2阀位控制器硬件输出1Y1FD2R HPCV2 控制器输出信号1读回Y1FD3 HPCV3阀位控制器硬件输出1Y1FD3R HPCV3 控制器输出信号1读回Y1FD4 HPCV4阀位控制器硬件输出1YIFD4R HPCV4控制器输出信号1读回Y1STK 连通管蝶形控制阀阀位控制器硬件输出1 Y1STKR 连通管蝶形控制阀控制器输出信号1读回Y1UEL OCV阀位控制器硬件输出1Y1UELR OCV 控制器输出信号1读回Y1ZD1 LPIDCV1阀位控制器硬件输出1Y1ZD1R LPIDCV1 控制器输出信号1读回Y1ZD2 LPIDCV2阀位控制器硬件输出1Y1ZD2R LPIDCV2 控制器输出信号1读回Y2AF1 IPCV1阀位控制器硬件输出2Y2AF1R IPCV1 控制器输出信号2读回Y2AF2 IPCV2阀位控制器硬件输出2Y2AF2R IPCV2 控制器输出信号2读回Y2FD1 HPCV1阀位控制器硬件输出2Y2FD1R HPCV1 控制器输出信号2读回Y2FD2 HPCV2阀位控制器硬件输出2Y2FD2R HPCV2 控制器输出信号2读回Y2FD3 HPCV3阀位控制器硬件输出2Y2FD3R HPCV3 控制器输出信号2读回Y2FD4 HPCV4阀位控制器硬件输出2Y2FD4R HPCV4 控制器输出信号2读回Y2STK 连通管蝶形控制阀阀位控制器硬件输出2 Y2STKR 连通管蝶形控制阀控制器输出信号2读回Y2UEL OCV阀位控制器硬件输出2Y2UELR OCV 控制器输出信号2读回Y2ZD1 LPIDCV1阀位控制器硬件输出2Y2ZD1R LPIDCV1控制器输出信号2读回Y2ZD2 LPIDCV2阀位控制器硬件输出2Y2ZD2R LPIDCV2 控制器输出信号2读回YAF IPCV阀位控制器设定值YAF1ED IPCV1控制器输出,阀位阻尼YAF1LS IPCV1慢关闭限制YAF1OG IPCV1控制器输出,上限YAF1R IPCV1阀位控制器输出YAF1UG IPCV1控制器输出,下限YAF2ED IPCV2控制器输出,阀位限制阻尼YAF2LS IPCV2慢关闭YAF2OG IPCV2控制器输出,上限YAF2R IPCV2阀位控制器输出YAF2UG IPCV2控制器输出,下限YFD1ED HPCV12控制器输出,阀位衰减限制YFD1LS HPCV1慢关闭YFD1OG HPCV1控制器输出,上限YFD1R HPCV1阀位控制器输出YFD1UG HPCV1控制器输出,下限YFD2ED HPCV2控制器输出,阀位衰减限制YFD2LS HPCV2慢关闭YFD2OG HPCV2控制器输出,上限YFD2R HPCV2阀位控制器输出YRD2UG HPCV2控制器输出,下限YFD3ED HPCV3控制器输出,阀位衰减限制YFD3LS HPCV3慢关闭YFD3OG HPCV3控制器输出,上限YFD3R HPCV3阀位控制器输出YFD3UG HP控制器3控制器输出,下限YFD4ED HP控制器4控制器输出,限制阀位衰减UFD4LS HPCV4慢关闭YFD4OG HPCV4控制器输出,上限YFD4R HPCV4阀位控制器输出YFD4UG HPCV4控制器输出,下限YFDPG1 主蒸汽压力控制器输出,限值1 UFDPG2 主蒸汽压力控制器输出,限值2 YFDPR 主蒸汽压力控制器输出YHATGO HP排汽压力控制器,上限YHATGU HP排汽压力控制器,下限YHATR HP排汽压力控制器输出YHATRH HP排汽压力控制器手动设定YHBDGO HP叶片压力控制器,上限YHBDGU HP叶片压力控制器,下限YHBDR HP叶片压力控制器输出YHVDR HP比控制器输出YHZPG1 热再热蒸汽压力控制器,限值1 YHZPG2 热再热蒸汽压力控制器,限值2 YHZPR 热再热蒸汽压力控制器输出YIVR 等焓修整控制器输出YNOR 转速/进汽控制器输出YNPR 转速/负荷控制器输出YR 中MIN选择功能输出YRFD 控制器跟踪MIN选择功能输出YRKOR 进汽校准YSTKED CBCV控制器输出,阀位限制阻尼YSTKLA CBCV慢启动YSTKOG CBCV控制器输出,上限YSTKR CBCV阀位控制器YSTKUG CBCV控制器输出,下限YUEL OCV控制器输出YUELLS OCV慢关闭YUELOG OCV控制器输出,上限YUELR OCV阀位控制器输出YUELUG OCV控制器输出,下限YZD LPIDCV控制器输出YZD1ED LPIDCV1控制器输出,阀位限制阻尼YZD1LS LPIDCV1慢关闭YZD1OG LPIDCV1控制器输出,上限YZD1R LPIDCV1阀位控制器输出YZD1UG LPIDCV1控制器输出,下限YZDPG1 LP补汽压力控制器,限值1 YZDPG2 LP补汽压力控制器,限值2 YZDPR LP进汽压力控制器输出ZIMV1A ZD1脱扣电磁阀1脱扣Z1MV2A ZD1脱扣电磁阀2脱扣ZD1 LPIDCV1ZD1A LPIDCV1启动ZD1AP LPIDCV1运行点ZD1KP LPIDCV1阀位控制器增益ZD1MN LPIDCV1控制器输出至最小ZD1MX LPIDCV1控制器输出至最大ZD1OK LPIDCV1关闭时间测量OKZD1R LPIDCV1阀位控制器测量ZD1RA LPIDCV1阀位控制器伺服阀控制ZD1Z LPIDCV1关闭ZDOB LPIDCV1补汽开始ZDOE LPIDCV1补汽结束ZDPR LP补汽压力控制阀ZDPRIE LP补汽压力控制阀有效ZDS LP补汽压力设定值ZDS1A LP补汽ESV1启动ZDS1OK LP补汽ESV1关闭时间测量OKZDS1Z LP补汽ESV1关闭ZDS2A LP补汽ESV2启动ZDA2OK LP补汽ESV2关闭时间测量OK ZDS2Z LP补汽ESV2关闭ZDSV 低压补汽压力设定值延迟ZDSVG 低压补汽压力设定值梯度延迟ZDSX 外部低压补汽压力设定值ZDSXA 外部低压补汽压力设定值OFF ZDSXAB 外部低压补汽压力设定值OFF命令ZDSXE 外部低压补汽压力设定值ON ZDSXEB 外部低压补汽设定值ON命令ZDUEH 低压补汽蒸汽状态合适2模块概述(本章节不是电厂专门说明书的一部分内容。
一、汽轮机控制器(Turbine Controller)汽轮机控制器画面主要由启动装置控制回路(S/UP DEVICE)、转速负荷控制回路(SPD/LOAD CTRL)、压力控制回路(HP PRES CTRL)三部分构成,以上三个回路换算出的指令经过中央低选功能得出总流量指令,再通过高排温度控制器(HP EXH TEMP CTRL)、高压叶片级压力控制器(HP BLAD PRES CTRL)及阀位限制功能(POSN LIMIT)的限制,从而控制高中压调门及补汽阀的阀门开度。
启动升程限制器(TAB)作用于汽机启动阶段,其指令输出(0~100%)由TAB自动生成,在启动过程中无需运行人员操作。
TAB每次到达某一限值时,其输出都会停止变化,等待执行特定任务操作,操作完成收到反馈信号后,输出才会继续变化。
在特殊工况下,TAB可切到外部控制,人为输入指令值,来改变总流量指令。
转速设定值(SPEED SETP)为汽机设置目标转速,由闭环控制器自动计算生成,在启动过程中无需运行人员操作。
当转速设定值手动设置不被闭锁时,也可人为输入目标转速值。
汽轮机实际转速(ST SPEED)以一定的速率升降至目标转速,该速率由TSE 温度裕度(TSE INFL)限制,在汽机启动前需运行人员手动投入TSE INFL,如该功能发生故障,将会报TSE故障(TSE FAULT),故障消除后需再次手动投入TSE。
在转速上升过程中,如果转速设定值与实际转速偏差过大(DEV TOO HIGH),将会闭锁设定值功能(STOP),待差值减小后自动解除闭锁设定值;在通过临界转速区时,如果加速度太小(ACCL<MIN),转速跟踪信号发生(BLOCKED),目标转速将以60r/min将实际转速拉到临界转速区外,直至运行人员手动复位(RELS SETP-CTRL)。
负荷设定值(LOAD SETP)为汽机设置目标负荷,并网后自动置于最小负荷设定值,在升负荷过程中,由运行人员手动输入目标负荷指令及升降负荷速率(LOAD GRAD SETP),该速率同样受TSE限制。
汽轮机TSI、DEH、ETS系统介绍汽轮机TSI、DEH、ETS系统介绍⒈汽轮机TSI系统介绍⑴ TSI系统概述汽轮机TSI(Turbine Supervisory Instrumentation)系统是一个监控和控制汽轮机运行的关键系统。
它主要由传感器、仪表、控制器和监控软件组成,用于实时监测和记录汽轮机的各种参数,以确保其安全可靠运行。
⑵ TSI系统功能TSI系统的功能包括:●监测并记录汽轮机的转速、温度、压力等参数。
●实时显示汽轮机的运行状态。
●报警和保护措施,一旦出现异常情况,系统会发出警报并采取相应的保护措施。
⑶ TSI系统组成TSI系统由以下几个主要组成部分组成:●传感器:用于测量汽轮机的各种参数,如转速、温度、压力等。
●仪表:用于显示汽轮机的运行状态和相关参数。
●控制器:用于实时监控和控制汽轮机的运行。
●监控软件:用于记录和分析汽轮机运行数据。
⒉ DEH系统介绍⑴ DEH系统概述DEH(Digital Electro-Hydraulic)系统是一种数字化电液控制系统,用于控制汽轮机的调速、负荷控制和安全保护。
它通过电信号与液压系统进行交互,实现对汽轮机的精确控制。
⑵ DEH系统功能DEH系统的功能包括:●汽轮机的精确调速控制。
●负荷控制,根据电网需求自动调整汽轮机的负荷。
●安全保护,监测并保护汽轮机免受过载、过热等危险情况。
⑶ DEH系统组成DEH系统由以下几个主要组成部分组成:●控制器:负责接收和处理控制信号,并控制液压系统。
●电液伺服阀:通过控制液压系统,实现对汽轮机调速和负荷的精确控制。
●传感器:用于测量汽轮机的转速、负荷等参数。
●人机界面设备:用于显示和操作DEH系统。
⒊ ETS系统介绍⑴ ETS系统概述ETS(Emergency Trip System)系统是一种紧急停机保护系统,用于监测和保护汽轮机在紧急情况下的安全停机。
⑵ ETS系统功能ETS系统的功能包括:●监测和检测汽轮机运行中的紧急情况。
汽轮机505控制器说明书汽轮机505控制器是一种用于汽轮机的控制系统,主要用于监测和控制汽轮机的运行状态和性能。
它由多个部分组成,包括传感器、执行器和处理器等,通过收集、处理和执行指令来实现对汽轮机的控制。
首先,汽轮机505控制器采用先进的传感器技术来监测汽轮机的运行状态。
传感器可以测量和检测各种参数,如温度、压力、转速、振动等,以获取汽轮机的运行数据。
这些数据可以帮助操作人员了解汽轮机的工作状态,发现潜在问题,并采取相应的措施。
其次,汽轮机505控制器采用高效的执行器来控制汽轮机的运行。
执行器可以根据控制器的指令,精确地调节汽轮机的运行参数,如增加或降低燃气流量、调节叶片角度等。
通过执行器的控制,汽轮机的运行可以达到最佳状态,并能够适应负荷变化等外部条件的变化。
第三,汽轮机505控制器拥有强大的处理能力。
它配备了先进的处理器,可以高效地处理传感器采集到的数据,并根据预设的算法进行分析和计算。
控制器可以比较实际参数与设定值之间的差异,并根据设定的控制策略调整执行器的工作,以保持汽轮机的运行性能在合理范围内。
此外,汽轮机505控制器还具有一些重要的功能,例如故障诊断和保护。
控制器可以检测到汽轮机的故障,并通过显示屏或报警器向操作人员发出警报。
有些控制器还可以自动采取措施,例如自动切断燃气供应或降低负荷,以保护汽轮机免受更严重的损坏。
最后,汽轮机505控制器还具备一定的通信能力。
它可以与其他控制系统进行通信,例如过程控制系统或监控系统,以实现信息的共享和数据的传输。
这样,汽轮机的运行数据可以被集中管理和监测,从而提高运行效率和安全性。
综上所述,汽轮机505控制器是一种重要的控制系统,它可以监测和控制汽轮机的运行状态和性能。
通过先进的传感器技术、高效的执行器和强大的处理能力,控制器可以实现对汽轮机的精确控制,并提供故障诊断和保护功能。
此外,控制器还具备通信能力,可以与其他系统进行数据交互。
因此,汽轮机505控制器在汽轮机的运行和维护中起着重要的作用。
DEH 基本画面说明1 、汽轮机控制器汽轮机控制器画面主要由启动装置控制回路(TAB)、转速负荷控制回路(SPD/LOAD CTRL)、压力控制回路(HP PRES CTRL)三部分构成,以上三个回路换算出的指令经过中央低选功能得出总流量指令,再通过高排温度控制器(HP EXH TEMP CTRL)、高压叶片级压力控制器(HP BLAD PRES CTRL)及阀位限制功能(POSN LIMIT)的限制,从而控制高中压调门及补汽阀的阀门开度。
启动升程限制器(TAB)作用于汽机启动阶段,其指令输出(0~100%)由 TAB 自动生成,在启动过程中无需运行人员操作。
TAB 每次到达某一限值时,其输出都会停止变化,等待执行特定任务操作,操作完成收到反馈信号后,输出才会继续变化。
在特殊工况下,TAB 可切到外部控制,人为输入指令值,来改变总流量指令。
TAB 指令主要用于分阶段完成机组启动过程中所需逐步完成的设备复位、设备检查等工作。
转速设定值(SPEED SETP)为汽机设置目标转速,由闭环控制器自动计算生成,在启动过程中无需运行人员操作,盘车转速为 50~60 转/分,程控设定暖机转速 360 转/分,当暖机结束后,由操作员手动释放额定转速,程控设定机组额定转速为 3009 转/分,略高于电网频率,用于防止并网瞬间逆功率。
当转速设定值手动设置不被闭锁时,也可人为输入目标转速值。
汽轮机实际转速(ST SPEED)以一定的速率升降至目标转速,该速率由 TSE 温度裕度(TSE INFL)限制,在汽机启动前需运行人员手动投入,如该功能发生故障,将会报 TSE 故障(TSE FAULT)。
在转速上升过程中,如果转速设定值与实际转速偏差过大(DEV TOO HIGH),将会闭锁设定值功能(STOP),待差值减小后自动解除闭锁设定值;在通过临界转速区时,如果加速度太小(ACCL<MIN),转速跟踪信号发生(TRACKED),目标转速将以 60r/min 将实际转速下降到临界转速区外,直至运行人员手动复位(RELS SETP-CTRL)。
汽机控制器相关介绍(B厂发电部一值刘期飞)汽机控制器是DEH的核心部分,它接受启动装置,转速设定,应力控制,遥控负荷,负荷设定,最大负荷,升速率,主汽压力的指令与限制。
同时通过改变主汽阀和调节汽阀的位置,从而改变机组进汽量,完成对汽轮机的转速及负荷实时控制,还可以参与电网一次调频、同步并网、甩负荷控制功能。
西门子汽轮机还可以实现真正意义上的汽轮机自启动,完全可以做到一键启机。
下面就汽机控制器相关功能做简要介绍:TAB启动装置:启动装置实际上是一个设定值调整器,它不仅能根据设定值的不同,巧妙地对汽机进行复置,而且还具备保护功能。
启动装置提供一个模拟量信号去一个低选逻辑。
在起动前,当遮断信号释放时,启动装置将阀位信号置零,保证调节阀可靠关闭。
在起动时起动装置的信号开始升高,使转速控制器进行转速控制,当汽机达到正常速度,并且发电机已同步,起动装置设定在100%位置,这样TAB启动装置控制器信号不再受限制。
功率负荷不平衡控制功能动作原理:当发电机负荷瞬间减少(变化率大于32.2%/10 ms)且发电机功率与机械功率的差值大于40%额定负荷时功率负荷不平衡控制动作, 通过CV的快关电磁阀( FASV)将CV 快速关闭,以抑制汽机超速,在触发条件消失后,功率负荷不平衡信号将保持3s后复位,CV的快关电磁阀失电,调门重新开启。
高压压力控制器:高压压力控制器用于控制主蒸汽压力。
控制方式分限压控制和初压控制两种。
限压方式一般用于炉跟踪,一方面可在主蒸汽压力下降到极限值时限制汽机负荷,使压力不致下降太多,另一方面也可充分利用锅炉蓄能,保证机组负荷稳定。
而初压方式一般用于机跟踪运行方式,它调整主蒸汽压力,使其压力保持稳定,但负荷波动量较大。
转速负荷控制器:转速负荷控制器是汽机控制器的核心,在并网前机组启动阶段,转速负荷控制器控制汽机升速,并在临界转速区对缸温、轴温及升速率进行控制,使转速大于一定值,同时还接受应力的指令,进行升速率限制,保证温度裕度大于允许温度30摄氏度,从而维持机组顺利升转速至额定转速。
在机组并网后,转速负荷控制器接受来自操作员站的负荷设定值、负荷升速率、最大负荷设定值等信号,完成对负荷的控制,还可以根据需要进行调频。
注意一点,在汽轮机并网情况下依然可以切到转速控制来控制机组负荷,通过转速对负荷设定时,我们机组3000R为0负荷,3015R满负荷,具体负荷根据比例进行计算。
同期功能:同期方式是转速控制阶段的一种特殊运行方式,根据电气同期装置来的同期增减信号调整汽轮机的转速,升至额定转速前设定汽机转速为3012 r/min。
设定转速值高出额定转速12r/min 的目的是为了要在降低转速下实施同期, 保证主开关闭合后发电机不会因逆功率而遮断。
TSE作用:即为汽轮机应力估算器,通过对下列部件的监视: HP主汽门阀壳,HP调节门阀壳,HP 汽缸,HP转子,IP转子。
进而计算出该部件所受热应力的大小,其大小可以由该部件与蒸汽接触表面的温度和50%深度处的温度这两者之间的温差来表征:温差大,热应力大;温差小,热应力小。
TSE根据所测的温差计算余量,然后作用于控制设定值,在起动时为转速设定值,在带负荷时为负荷设定值。
从而避免出现最小的蒸汽温度限制以避免加热组件时的不适当冷却,最小的汽缸温度限制以避免在给定的蒸汽温度下出现不适当的瞬时的热载荷,在启动及带负荷时防止汽机超过热应力运行,即为我们经常会用到的X准则。
同时该准则还可以在在汽轮机带蒸汽冲转前设置一定的过热度,以防止汽轮机发生水击现象。
一次调频:,一次调频功能投入时,直接与功率或流量信号叠加,控制汽轮机的调门开度。
一次调频一般要设定频差死区,频差死区的设定为了防止在电网频差小范围变化时汽机调门不必要的动作,有利于机组稳定运行。
同时还可以设定调频限幅,如我厂一般要求限幅为400MW到1000MW之间,一方面要求锅炉侧参数稳定,一方面防止大幅度过负荷。
还有我厂的补汽阀是否参与一次调频还有待商量,西门子专家建议我厂调门保留5%的裕度,以用于一次调频。
汽机控制器画面介绍:44 SYNUP/SYN DOWN注释如下:1:S/UPDEVICE :启动装置2:SPEED SETP:转速设定3:TSE INFL:应力限制,TSE FAULT报警时将闭锁负荷增长和转速升高4:LOAD GRAD SETP:升负荷率设定。
5:LOAD SETP:手动负荷设定6:EXTERN LOAD SETP:遥控负荷设定,将此按钮投入就将负荷交由外界控制。
7:MAX LOAD SETP:最大负荷设定8:HP SETP:主汽压力设定9:ST SPEED 汽机实际转速10:TRACKED :在设定转速控制失去作用的情况下,如在机组停机过程中或者发生事故情况,机组自身设定的转速将自动跟踪转速实际值,机组转速跟踪设定值=转速实际值—60R,如机组停机后,设定跟踪值将为-60R。
从而可以保证调门的关严。
11:ACCL<MIN :冲转过程中,过临界时汽轮机转速<一定值。
12:DEV TOO HIGH :汽轮机转速设定值与实际值相差太大13::RELS SETP –CTRLS:在CONTROLLER NOT OK报警或其他故障报警的情况下,如果确认故障没有问题,按此进行复位。
机组才可以继续走步。
14:RELEASED:走步释放在释放位置,表示可以正常走步。
15:BLOCKED:闭锁走步:CONTROLLER NOT OK报警时,启动装置将闭锁机组走步,停止增减负荷/转速,如果确认故障本身没有问题,可以通过复位RELS SETP –CTRLS,机组恢复正常走步。
16:STOP:停止走步,出现:limit press reached,DEV TOO HIGH、TSE FAULT 、ACCL<MIN报警时,机组停止升转速和加负荷,等稳定到规定值以内后再继续走步,在此期间,可能出现负荷或者转速下降现象。
17:PRESS OP.MODE 压力模式,0表示没有预选,1和2相应表示限压模式和初压模式。
18: HP:实际主汽压力,对主汽压力增长起到一个限制作用,防止输出设定压力与实际压力相差太大。
19:HP PRESS CTRL:主汽压力控制器20:LOAD OP .MODE 转速负荷控制模式,0表示没有预选,1和2相应表示转速控制和负荷控制模式。
21:SPD CTRL ACT 转速控制起作用22:ACTIVE POWER 实际负荷,对输出的负荷设定起到一个限制作用。
23:LOAD CTRL ACT 负荷控制起作用24:FREQU INFL 一次调频25:SPD/LOAD CTRL :转速负荷控制器,汽轮机控制器的核心控制部分。
26:S/UP ACT 启动装置控制起作用27:HP PRESS ACT 主汽压力控制起作用SGC OPEN HP-TURB:恢复高压缸进汽,当负荷达到一定值或者外面条件满足的情况下,它会自动恢复高压缸进汽。
此键基本不要我们操作,它会自动投入。
28:limit press reached :此时不在初压方式下,即压力控制器启作用,:limit press reached相当于一个限压保护动作。
当机前主蒸汽压力由于某种原因降低到汽压保护限值以下时,DEH将强迫高压调节阀关小,使汽压得以恢复;当汽压恢复到保护限值之上时,调节阀便不再关小,DEH继续原先的调节控制,此汽压保护动作消失。
在汽压保护动作期间,高压调节阀关小,汽机负荷可能出现实际负荷下降的现象。
为防止调门全部关死的现象,蒸汽流量低于额定流量10%的情况下,调门不在关闭,自动解除限压保护动作。
29:SGC TURBINE:汽轮机启动走步子组30:STM PURITY:蒸汽品质确认31:REL NOMINAL SPEED:汽轮机转速释放,此只是为了设置一个中断点,没有其它意义。
操作员应该利用此时间来确认机组本身有没有问题,然后可以继续冲转。
32:SGC OPEN HP-TURB:恢复高压缸进汽,当负荷达到一定值或者外面条件满足的情况下,它会自动恢复高压缸进汽。
此键基本不要我们操作,它会自动投入。
33:HP EXH TEMP CTRL:高压缸排汽温度控制,该控制器是一个限制控制器,当高压缸排汽温度超过475时,控制器输出负值,关小中压调门,减小蒸汽流量,进而调整高压缸排汽温度,使之保持在允许范围内。
高于495时,,关高调门,关高排逆止门,切除高压缸,开启高压通风阀,转变为中压缸进汽方式。
ACT表示高压缸排汽温度控制器动作。
34:HP BLAD PRESS CTRL:高压叶片压力控制,BLAD PRESS CTRL ACT表示高压缸叶片压力动作。
它输出负值,关小高压调门。
35:REINTEGRATION F-ACK:主气门、调门跳闸电磁阀继电器断电会发此报警。
表示上面无法确认下面跳闸电磁阀状态。
如果经检查确信没有故障,可以按此键加以恢复。
36:REST TRIP :机组跳闸后复位37:CONTROLLER NOT OK,汽轮机控制器NOT OK,如果发此报警信号表示测点或者系统出现问题,将闭锁机组加负荷和增转速。
38:ON LOAD :并网状态39:LAW KU:短甩负荷,即以前的功率负荷不平衡。
具体解释键上面的功率负荷不平衡原理。
40:TRIPPED:机组跳闸41::LAW GPLSPQU:长甩负荷。
既发电机出口开关跳闸或者电网发生永久性故障时,机组快速切掉所有负荷,控制方式转为转速控制,为FCB的一种。
42 LIMT ACT:阀位限制动作,表示实际值大于阀位设定值。
43:POSN LIMT:阀位限制,并网后我们一般把阀位限制值设定为105%,可以保证调门的全开。
44:SYN UP/SYN DOWN:同期增/同期减评语本文对汽机主控画面的介绍比较详实,值得大家学习和借鉴!。