电动机惯量的说明
- 格式:doc
- 大小:28.00 KB
- 文档页数:1
转动惯量一、基本概念惯量J 是一个常用的物理量,在负载被加速或减速的过程中中,是一个非常重要的参数。
转动惯量又可以称为惯性矩,它的的定义是:物体每一质点的质量m 与这一质点到旋转中心轴线的距离r 的二次方的乘积的总和,其数学表达式为:J =21m 2r 。
(1)在伺服控制系统中,大多数的传动机构具有圆柱状构件,因此,下面介绍几种圆柱状物体的转动惯量的计算。
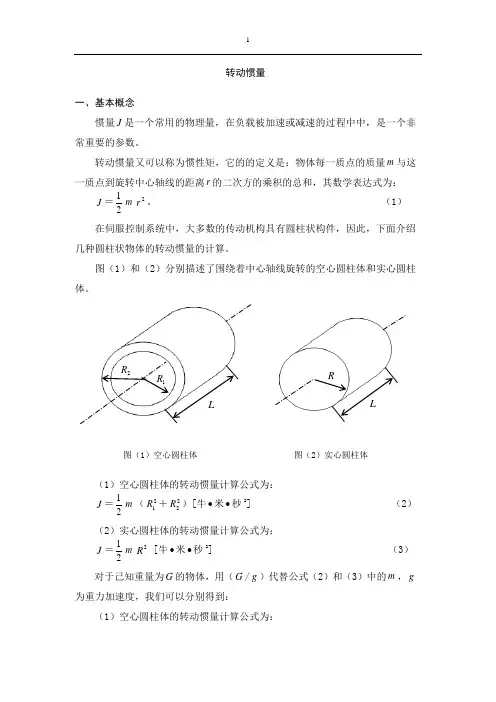
图(1)和(2)分别描述了围绕着中心轴线旋转的空心圆柱体和实心圆柱体。
图(1)空心圆柱体 图(2)实心圆柱体(1)空心圆柱体的转动惯量计算公式为:J =21m (21R +22R )[牛∙米∙秒2] (2)(2)实心圆柱体的转动惯量计算公式为:J =21m 2R [牛∙米∙秒2] (3)对于己知重量为G 的物体,用(G /g )代替公式(2)和(3)中的m ,g 为重力加速度,我们可以分别得到:(1)空心圆柱体的转动惯量计算公式为:J =gR R G 2)(2221+[牛∙米∙秒2] (4)(2)实心圆柱体的转动惯量计算公式为:J =gGR 22[牛∙米∙秒2] (5)如果重量不知道,但知道旋转物体的体积V 和密度γ,则可用(V γ/g )代替公/式(2)和(3)中的m ,我们可以得到:(1)空心圆柱体的转动惯量计算公式为:J =)(24142R R gL -γπ[牛∙米∙秒2] (6)(2)实心圆柱体的转动惯量计算公式为:J =42R gL γπ[牛∙米∙秒2] (7)二、计算 举例说明1.换向器的惯性矩K JK J =81.910)(32244-⨯-⨯K K KiK l D D γπ[克∙厘米∙秒2]。
换向器的几何尺寸: 换向器的外径K D =0.6[厘米]; 换向器的内径Ki D =0.38[厘米]; 换向器的轴向长度K l =0.5[厘米]。
在几何尺寸和材料已知的情况下,换向器的惯性矩K J 为:K J =81.910)(32244-⨯-⨯K K KiK l D D γπ= =81.9105.75.0)38.06.0(32244-⨯⨯⨯-⨯π=4.079×510- [克∙厘米∙秒2],式中,K γ是换向器材料的平均比重,取K γ≈7.5[克/厘米3]。
电机参数电机(英文:Electric machinery,俗称“马达”)是指依据电磁感应定律实现电能转换或传递的一种电磁装置。
电机在我们生活生产等各个方面无处不在,但是电机设计的各种电学机械参数有些让人头疼不已,下面我们就电机中参数术语进行一个整理。
下文中的参数解释比较简单,主要是为了方便不同行当的读者对于电机参数概念的理解,并非最完整的定义(如很多参数定义需要附带温度湿度等一系列的环境定义等)。
1、标称功率或额定功率(Rated Power or Assigned power rating)。
指该电机系统设计设计时的理想功率也是在推荐工作情况下的最大功率。
额定功率是表征电机工作能力的重要指标。
2、额定电压或工作电压(Rated Voltage or Nominal Voltage)。
由于一般电机可以工作在不同电压下,但电压直接和转速有关,其他参数也相应变化,所以该电压只是一种建议电压。
其他参数也是在这种推荐的电压下给出的。
3、空载转速(No load speed)。
单位是(转/每分钟)RPM 此处的R不是RATE 速度的意思,是REVOLUTION旋转的意思,(revolutions per minute)即每分钟转多少圈。
转速是外行看电机参数的一个大坑,因为它不是以一秒为单位,而是分钟,转速频率转换时需要注意这点。
值得注意的是,rpm以分钟作为时间基准单位,但近年来精密型转动、精密型转速的马达愈来愈多,以分钟为单位是早期技术尚不够进步,每秒转动的圈数尚不稳定时(如:这一秒转590圈,下一秒转611圈),因此才以分钟为量测基准单位,如今逐渐也开始有以每秒为单位的需要,特别是有精密控制旋转圈数需求的马达上。
空载转速由于没有反向力矩,所以输出功率和堵转情况不一样,该参数只是提供一个电机在规定电压下最大转速的作用。
4、额定转速(Rated Speed ):是指在额定功率下电机的转速。
也即满载时的电机转速,故又叫做满载转速。
![[说明]电机转动惯量匹配](https://uimg.taocdn.com/7b834108c4da50e2524de518964bcf84b9d52dba.webp)
在伺服系统选型及调试中,常会碰到惯量问题。
其具体表现为:在伺服系统选型时,除考虑电机的扭矩和额定速度等等因素外,我们还需要先计算得知机械系统换算到电机轴的惯量,再根据机械的实际动作要求及加工件质量要求来具体选择具有合适惯量大小的电机;在调试时,正确设定惯量比参数是充分发挥机械及伺服系统最佳效能的前提。
此点在要求高速高精度的系统上表现尤为突出,这样,就有了惯量匹配的问题。
一、什么是“惯量匹配”?1、根据牛顿第二定律:“进给系统所需力矩T = 系统传动惯量J ×角加速度θ角”。
加速度θ影响系统的动态特性,θ越小,则由控制器发出指令到系统执行完毕的时间越长,系统反应越慢。
如果θ变化,则系统反应将忽快忽慢,影响加工精度。
由于马达选定后最大输出T值不变,如果希望θ的变化小,则J应该尽量小。
2、进给轴的总惯量“J=伺服电机的旋转惯性动量JM +电机轴换算的负载惯性动量JL。
负载惯量JL由(以平面金切机床为例)工作台及上面装的夹具和工件、螺杆、联轴器等直线和旋转运动件的惯量折合到马达轴上的惯量组成。
JM为伺服电机转子惯量,伺服电机选定后,此值就为定值,而JL则随工件等负载改变而变化。
如果希望J变化率小些,则最好使JL所占比例小些。
这就是通俗意义上的“惯量匹配”。
二、“惯量匹配”如何确定?传动惯量对伺服系统的精度,稳定性,动态响应都有影响。
惯量大,系统的机械常数大,响应慢,会使系统的固有频率下降,容易产生谐振,因而限制了伺服带宽,影响了伺服精度和响应速度,惯量的适当增大只有在改善低速爬行时有利,因此,机械设计时在不影响系统刚度的条件下,应尽量减小惯量。
衡量机械系统的动态特性时,惯量越小,系统的动态特性反应越好;惯量越大,马达的负载也就越大,越难控制,但机械系统的惯量需和马达惯量相匹配才行。
不同的机构,对惯量匹配原则有不同的选择,且有不同的作用表现。
不同的机构动作及加工质量要求对JL与JM大小关系有不同的要求,但大多要求JL与JM的比值小于十以内。
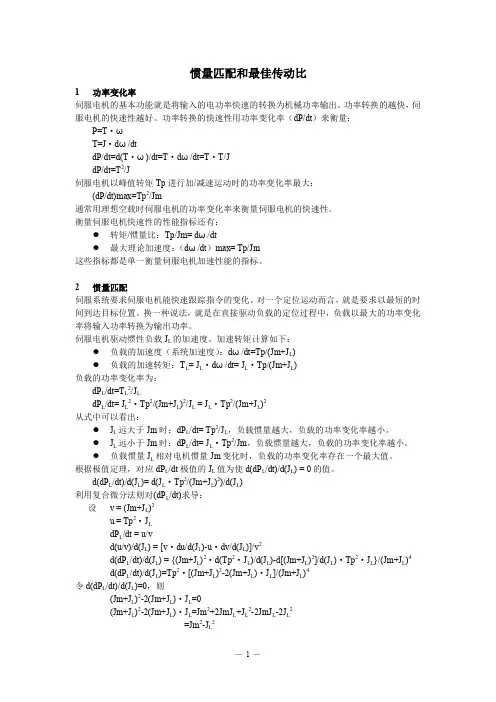
惯量匹配和最佳传动比1 功率变化率伺服电机的基本功能就是将输入的电功率快速的转换为机械功率输出。
功率转换的越快,伺服电机的快速性越好。
功率转换的快速性用功率变化率(dP/dt)来衡量:P=T·ωT=J·dω/dtdP/dt=d(T·ω)/dt=T·dω/dt=T·T/JdP/dt=T2/J伺服电机以峰值转矩Tp进行加/减速运动时的功率变化率最大:(dP/dt)max=Tp2/Jm通常用理想空载时伺服电机的功率变化率来衡量伺服电机的快速性。
衡量伺服电机快速性的性能指标还有:●转矩/惯量比:Tp/Jm= dω/dt●最大理论加速度:(dω/dt)max= Tp/Jm这些指标都是单一衡量伺服电机加速性能的指标。
2 惯量匹配伺服系统要求伺服电机能快速跟踪指令的变化。
对一个定位运动而言,就是要求以最短的时间到达目标位置。
换一种说法,就是在直接驱动负载的定位过程中,负载以最大的功率变化率将输入功率转换为输出功率。
伺服电机驱动惯性负载J L的加速度、加速转矩计算如下:●负载的加速度(系统加速度):dω/dt=Tp/(Jm+J L)●负载的加速转矩:T L= J L·dω/dt= J L·Tp/(Jm+J L)负载的功率变化率为:dP L/dt=T L2/J LdP L/dt= J L2·Tp2/(Jm+J L)2/J L = J L·Tp2/(Jm+J L)2从式中可以看出:●J L远大于Jm时:dP L/dt= Tp2/J L,负载惯量越大,负载的功率变化率越小。
●J L远小于Jm时:dP L/dt= J L·Tp2/Jm,负载惯量越大,负载的功率变化率越小。
●负载惯量J L相对电机惯量Jm变化时,负载的功率变化率存在一个最大值。
根据极值定理,对应dP L/dt极值的J L值为使d(dP L/dt)/d(J L) = 0的值。
LSM系列交流永磁同步伺服电动机使用说明书感谢您使用本公司交流永磁同步伺服电动机(以下简称电机),操作电机前需充分了解本公司的电机型号规格和使用说明书。
安装电机前特别需要注意安全预防措施!安全预防措施非正确使用本电机会造成重大的人身和财产事故。
所有接触电机接线端子的工作必须由有资格的专业人员完成。
请确认电机的供电已被切断且肯定不会再被接通。
1.安全提示1)在对电机或电机驱动器进行任何工作前,请切断供电且确认不会再被接通,旋转部件须处于静止状态。
2)SQ系列电机旋转时,电机端子上有高压,它能导致人身事故。
3)装有阻转制动器的电机,请检查其工作无误,阻转制动器仅用于电机停转的情况下。
允许的紧急制动次数,请查阅电机目录中有关摩擦片的数据。
不允许将阻转制动器作为工作制动器使用。
只允许本公司或经本公司授权的服务站进行维修工作。
4)电机表面温度会超过60℃。
不允许在电机附近放置或在电机上安装对温度敏感的物件。
必要时,须采取防人身接触措施。
2.拆封检查:客户收到电机后,请立即检查以下事项:1)检查电机外观和配件是否有损坏等异常情况。
2)检查电机配线是否毁坏,是否可与电机相连接。
3)电机型号与您定单上的型号是否相同,如有任何不符请与我公司业务处联系。
3.运输、安装和仓储1)搬运电机时不可拖拉电机引出线或紧握电机主轴。
2)安装电机连接器时请勿敲击电机主轴和后罩壳以防止损坏电机轴承和精密反馈元件。
3) 安装时,请注意将电机放在平整的平面上,法兰盘要固定好。
机械部分连接时,请注意上下左右要调准。
偏差将导致不允许的振动,并会损伤轴承和机械耦合部件。
4) 要采用与电机适配的电机驱动器。
请查阅相关产品文件或咨询我公司技术人员。
超过允许的最大电机电流值时,会立刻导致电机永磁体的去磁。
5)只允许存放于干燥,无粉尘以及通风的房间内。
使用前,请用500V兆欧表检查绝缘。
如绕组对机壳的绝缘电阻≤2MΩ,电机在使用前须烘干。
6)长期存放后(大于三个月),为使轴承中的润滑油得以均匀分布,应让电机短时地低速运转,速度为500rpm.如自行装卸电机引起任何问题,恕不负责。
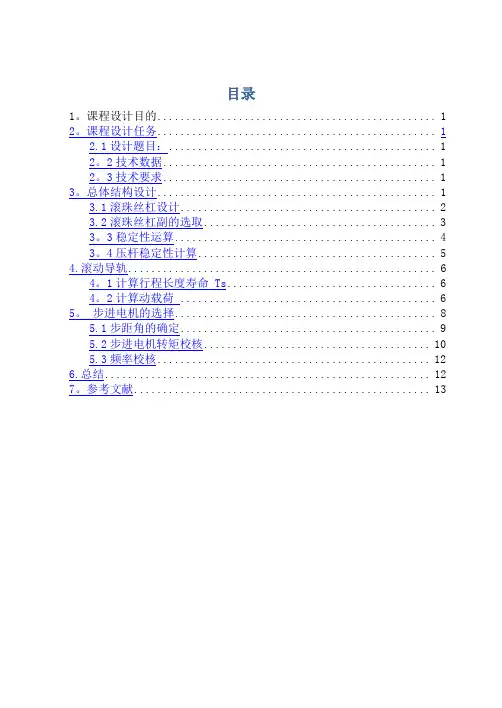
目录1。
课程设计目的 (1)2。
课程设计任务 (1)2.1设计题目: (1)2。
2技术数据 (1)2。
3技术要求 (1)3。
总体结构设计 (1)3.1滚珠丝杠设计 (2)3.2滚珠丝杠副的选取 (3)3。
3稳定性运算 (4)3。
4压杆稳定性计算 (5)4.滚动导轨 (6)4。
1计算行程长度寿命 Ts (6)4。
2计算动载荷 (6)5。
步进电机的选择 (8)5.1步距角的确定 (9)5.2步进电机转矩校核 (10)5.3频率校核 (12)6.总结 (12)7。
参考文献 (13)1。
课程设计目的本课程设计的目的在于培养学生对典型机电一体化产品机械结构的设计能力和对机电伺服系统的设计能力,在学习有关专业课程设计的基础上,进行机电系统设计的初等训练,掌握手册、标准、规范等资料的使用方法,培养分析问题和解决问题的能力,为以后的毕业设计打下良好的基础.2.课程设计任务2。
1设计题目:X—Y双坐标联动数控工作台设计2。
2技术数据工作台长×宽(mm):450×310工作台重量(N):3300行程(mm):ΔX=60-100;ΔY=50-100脉冲当量:0。
05-0。
08mm/p2。
3技术要求(1)工作台进给运动采用滚珠丝杠螺旋结构(2)滚珠丝杠支撑方式:双锥-简支型(3)驱动电机为反应式步进电机(4)步进电机与滚珠丝杠间采用齿轮降速要求消除齿轮间隙3.总体结构设计数控工作台采用由步进电机驱动的开环控制结构,其单向驱动系统结构简图如图所示:实际设计的工作台为X、Y双坐标联动工作台,工作台是由上拖板、中拖板、下拖板及导轨、滚珠丝杠等组成.其中下拖板与床身固联,它上面固定X向导轨,中拖板在下拖板的导轨上横向运动,其上固定Y向导轨,上拖板与工作台固联,在Y向导轨上移动。
X、Y导轨方向互相垂直。
3。
1滚珠丝杠设计滚珠螺旋传动按滚动体循环方式分为外循环和内循环两类,其中应用较广的是插管式和螺旋槽式,它们各有特点,其轴向间隙的调整方法主要有垫片调隙式和螺纹调隙式。
三相异步电动机启动转矩大的原因
三相异步电动机是一种常见的电动机,适用于各种不同的工业和商业应用。
在启动时,三相异步电动机通常需要承受较大的启动转矩,这是由于多种因素导致的。
本文将探讨三相异步电动机启动转矩大的原因。
三相异步电动机的转子惯量较大,这是导致启动转矩大的主要原因之一。
转子惯量是指转子对转速变化的抵抗能力,即转子的质量和几何结构对电动机启动和停止的反应能力。
在启动时,电动机需要克服转子惯量的惯性力才能开始转动。
因此,转子惯量越大,启动转矩就越大。
三相异步电动机的定子电阻对启动转矩也有影响。
定子电阻越大,启动转矩就越大。
这是因为在启动时,电动机需要克服定子电阻产生的电压降才能开始转动。
因此,定子电阻越大,启动转矩就越大。
三相异步电动机的负载也会影响其启动转矩。
当电动机负载较大时,启动转矩也会相应增大。
这是因为在启动时,电动机需要克服负载的惯性力才能开始转动。
因此,负载越大,启动转矩就越大。
三相异步电动机的供电电压和频率也会影响其启动转矩。
当供电电压和频率较低时,启动转矩也会相应增大。
这是因为在启动时,电动机需要克服较低的电压和频率产生的阻力才能开始转动。
因此,供电电压和频率越低,启动转矩就越大。
三相异步电动机启动转矩大的原因主要包括转子惯量大、定子电阻大、负载大、供电电压和频率低等因素。
在设计和选择三相异步电动机时,需要考虑这些因素,以确保电动机能够正常启动并满足工作要求。
同时,在实际应用中,还需要采取一系列措施来降低启动转矩,如采用软启动器、降低负载、提高供电电压和频率等。
在伺服系统选型及调试中,常会碰到惯量问题。
其具体表现为:在伺服系统选型时,除考虑电机的扭矩和额定速度等等因素外,我们还需要先计算得知机械系统换算到电机轴的惯量,再根据机械的实际动作要求及加工件质量要求来具体选择具有合适惯量大小的电机;在调试时,正确设定惯量比参数是充分发挥机械及伺服系统最佳效能的前提。
此点在要求高速高精度的系统上表现尤为突出,这样,就有了惯量匹配的问题。
一、什么是“惯量匹配”?1、根据牛顿第二定律:“进给系统所需力矩T = 系统传动惯量J ×角加速度θ角”。
加速度θ影响系统的动态特性,θ越小,则由控制器发出指令到系统执行完毕的时间越长,系统反应越慢。
如果θ变化,则系统反应将忽快忽慢,影响加工精度。
由于马达选定后最大输出T值不变,如果希望θ的变化小,则J应该尽量小。
2、进给轴的总惯量“J=伺服电机的旋转惯性动量JM +电机轴换算的负载惯性动量JL。
负载惯量JL由(以平面金切机床为例)工作台及上面装的夹具和工件、螺杆、联轴器等直线和旋转运动件的惯量折合到马达轴上的惯量组成。
JM为伺服电机转子惯量,伺服电机选定后,此值就为定值,而JL则随工件等负载改变而变化。
如果希望J变化率小些,则最好使JL所占比例小些。
这就是通俗意义上的“惯量匹配”。
二、“惯量匹配”如何确定?传动惯量对伺服系统的精度,稳定性,动态响应都有影响。
惯量大,系统的机械常数大,响应慢,会使系统的固有频率下降,容易产生谐振,因而限制了伺服带宽,影响了伺服精度和响应速度,惯量的适当增大只有在改善低速爬行时有利,因此,机械设计时在不影响系统刚度的条件下,应尽量减小惯量。
衡量机械系统的动态特性时,惯量越小,系统的动态特性反应越好;惯量越大,马达的负载也就越大,越难控制,但机械系统的惯量需和马达惯量相匹配才行。

同步电动机的转动惯量和飞轮转矩冯大勇,杨国峰吉林石化公司炼油厂和乙烯厂,吉林吉林(132021)摘要介绍了同步电动机正确选择转动惯量和飞轮转矩的必要性,转动惯量和飞轮转矩物理概念,二者间的换算关系,同步电动机的转动惯量和飞轮转矩的计算及新方法的应用,驱动往复式压缩机类型机械设备的同步电动机转动惯量的选择。
关键词转动惯量;飞轮转矩;同步电动机;往复式压缩机中图分类号:TM341文献标识码:A文章编号:1008-7281(2011)05-0017-03Inertia Moment and Flying Wheel Torque of Synchronous MotorFeng Dayong and Yang GuofengAbstract This paper introduces the necessity to correctly select the inertia moment and flying wheel torque of synchronous motor,and describes the physical concept,conversion rela-tionship and calculation methods of the two quantities.How to apply the new method and how to select the inertia moment of synchronous motor for driving machineries such as reciprocating compressor are also proposed.Key words Inertia moment;flying wheel torque;synchronous motor;reciprocating com-pressor0引言同步电动机主要用于驱动往复式压缩机,由于压缩机的自身特性,设计时必须保证压缩机曲轴的旋转角速度变化在合理范围内,以避免在运动机件连接处引起附加动载荷及在垂直于曲轴的平面内产生振动,影响机件的强度和降低机械效率。
西门子MicroMaster440变频器常用参数的设置摘要本文以西门子MircoMaster 440变频器为例,说明变频器常用参数的设置方法。
关键词控制方式;加减速时间;转动惯量;快速调试;动态缓冲;负载制动;转矩提升一般变频器的参数有数百甚至上千个,对这些参数进行合理正确的设置是使变频器高效运行并且满足用户要求的前提,那么,如何进行设置呢?本文以西门子MicroMaster440变频器为例进行说明。
1 变频器的控制方式它是由负载的力矩特性所决定的,电动机的机械负载转矩特性由下式决定:P=Tn/9550 式中:P:电动机功率KW. T:电动机转矩N*M. n:电动机的转速rpm。
转矩T与转速n的关系可分为3种:①恒转矩:转速变化时转矩恒定的负载。
如传送带,起重机等;②恒功率:转速和转矩成反比关系,但是二者之积恒定不变。
如机床主轴;③变转矩:转矩随着转速的变化按照一定的函数关系变化的负载。
如风机,泵类等。
当参数变频器控制方式P1300=0时变频器工作在线性U/F 方式,此方式能够适应大多数恒转矩负载。
如果负载是风机,泵类则P1300=1。
在变频调速的时候系统可能会发生共振现象,从而造成系统工作异常甚至机械损坏,为此变频器提供了可跳转频率的功能,P1091~P1094用于设置跳转频率点P1101用于设置跳频带宽,从而避免共振。
当P1300=3时变频器的工作在可编程的U/F控制方式P1320.P1322.P1324提供了可编程频率坐标,P1321.P1323.P1325提供了可编程的电压坐标,该方式能在某一特定频率下为电动机提供特定的转矩以适应负载的变化。
矢量控制是仿照直流电动机的控制思想对异步电动机进行控制,首先将定子三相电流通过坐标换算成励磁电流分量和电枢电流分量并且分别对这2个量进行控制。
因此电动机的机械特性是非常硬的而且具有很高的动态响应能力。
根据需要可以将P1300=20/21无/有反馈矢量控制或P1300=22/23无/有反馈的矢量转矩控制以满足负载的控制精度。
丝杆传动伺服电机转矩计算公式概述说明以及解释1. 引言1.1 概述在机械工程领域中,丝杆传动伺服电机转矩计算是一个重要的问题。
丝杆传动是一种常见的力传递装置,它通过螺旋副来实现力的转换和传递。
而伺服电机是一种能够精确控制位置和转速的电动机。
为了正确设计和使用丝杆传动伺服电机系统,必须准确计算所需的转矩。
1.2 文章结构本文将从以下几个方面详细阐述丝杆传动伺服电机转矩计算公式:丝杆传动原理介绍、伺服电机转矩计算方法以及相关参数解释。
接下来,本文将推导出转矩计算公式,并介绍简化与优化方法以提高计算效率。
随后,我们将通过工程实践验证这些公式的准确性,并分析结果讨论。
最后,本文将总结主要研究成果,并对未来发展提出展望和建议。
1.3 目的本文的目标是给读者提供一个全面了解丝杆传动伺服电机转矩计算公式的资料,使其能够理解其原理并应用于实际工程中。
通过该文章的学习,读者将能够准确计算所需的转矩,并能够避免在设计和使用过程中可能遇到的问题。
同时,本文也希望为相关领域的进一步研究提供一定的参考和指导。
2. 丝杆传动伺服电机转矩计算公式:2.1 丝杆传动原理介绍:丝杆传动是一种常见的机械传动方式,常用于将旋转运动转换为直线运动。
它由螺纹丝杆和螺母组成,通过回转螺杆来推动螺母在丝杆上产生直线位移。
丝杆传动具有高效、精确、可靠的特点,广泛应用于各种领域中。
2.2 伺服电机转矩计算方法:在丝杆传动系统中,伺服电机所需提供的转矩是非常重要的参数。
它决定了能否准确实现所需的位移和速度控制。
转矩计算公式的推导基于以下几个关键参数:- 加速度:表示系统在单位时间内改变速度的能力。
- 惯性负载:表示被驱动物体对运动状态变化的阻力。
- 系统效率:表示能量在传递过程中损失的比例。
根据这些参数,可以得到如下伺服电机转矩计算公式:T = J * α+ F * d / (2π) + Tw其中:- T 表示所需的转矩;- J 是伺服电机的转动惯量,反映了系统对改变旋转速度的阻力;- α是系统的加速度,表示旋转速度的单位改变率;- F 是负载物体的摩擦力或其它阻尼力,表示系统受到的外部阻力;- d 是丝杆导程,表示螺纹丝杆每圈所产生的线性位移;- Tw 是伺服电机额定扭矩。
西门子MicroMaster440变频器常用参数的设置摘要本文以西门子MircoMaster 440变频器为例,说明变频器常用参数的设置方法。
关键词控制方式;加减速时间;转动惯量;快速调试;动态缓冲;负载制动;转矩提升一般变频器的参数有数百甚至上千个,对这些参数进行合理正确的设置是使变频器高效运行并且满足用户要求的前提,那么,如何进行设置呢?本文以西门子MicroMaster440变频器为例进行说明。
1 变频器的控制方式它是由负载的力矩特性所决定的,电动机的机械负载转矩特性由下式决定:P=Tn/9550 式中:P:电动机功率KW. T:电动机转矩N*M. n:电动机的转速rpm。
转矩T与转速n的关系可分为3种:①恒转矩:转速变化时转矩恒定的负载。
如传送带,起重机等;②恒功率:转速和转矩成反比关系,但是二者之积恒定不变。
如机床主轴;③变转矩:转矩随着转速的变化按照一定的函数关系变化的负载。
如风机,泵类等。
当参数变频器控制方式P1300=0时变频器工作在线性U/F 方式,此方式能够适应大多数恒转矩负载。
如果负载是风机,泵类则P1300=1。
在变频调速的时候系统可能会发生共振现象,从而造成系统工作异常甚至机械损坏,为此变频器提供了可跳转频率的功能,P1091~P1094用于设置跳转频率点P1101用于设置跳频带宽,从而避免共振。
当P1300=3时变频器的工作在可编程的U/F控制方式P1320.P1322.P1324提供了可编程频率坐标,P1321.P1323.P1325提供了可编程的电压坐标,该方式能在某一特定频率下为电动机提供特定的转矩以适应负载的变化。
矢量控制是仿照直流电动机的控制思想对异步电动机进行控制,首先将定子三相电流通过坐标换算成励磁电流分量和电枢电流分量并且分别对这2个量进行控制。
因此电动机的机械特性是非常硬的而且具有很高的动态响应能力。
根据需要可以将P1300=20/21无/有反馈矢量控制或P1300=22/23无/有反馈的矢量转矩控制以满足负载的控制精度。
三相电机的惯量一、引言三相电机是一种常见的旋转设备,广泛应用于工业生产中。
了解电机的特性对于正确使用和维护电机至关重要。
其中一个重要参数是电机的惯量。
本文将从基本概念、计算方法和影响因素等方面介绍三相电机的惯量。
二、基本概念1. 惯量的定义在物理学中,惯量是描述物体对于改变其状态(包括静止和运动状态)的抵抗程度的物理量。
对于三相电机而言,惯量表示了电机转子对于转速变化的抵抗能力。
2. 惯量的单位惯量的单位通常使用kg·m²或g·cm²来表示,其中1 kg·m²等于1000 g·cm²。
三、计算方法1. 转子惯量转子惯量是三相电机惯量的主要组成部分。
计算转子惯量的一种常用方法是使用转子的质量和尺寸数据。
具体计算公式如下:转子惯量 = 转子质量×转子半径²2. 转子与负载的惯量在实际应用中,电机不仅需要驱动自身转子的惯量,还需要克服负载的惯量。
负载的惯量包括传动系统、工作机械等。
计算转子与负载的总惯量时,需将转子惯量和负载惯量相加。
3. 转矩-转速曲线法除了使用质量和尺寸数据计算惯量外,还可以通过转矩-转速曲线法来测量电机的惯量。
该方法通过在电机轴上施加一定的扭矩,并测量电机转速的变化,从而得到电机的惯量值。
四、影响因素1. 转子质量和几何形状:转子的质量和几何形状是决定电机惯量的关键因素。
转子的质量越大,惯量也越大。
2. 负载惯量:负载的惯量是影响电机总惯量的重要因素。
如果负载的惯量较大,电机需要更大的力矩来克服负载的惯性。
3. 传动系统:传动系统的效率和转动稳定性会直接影响到电机的惯量。
传动系统越稳定,电机惯量也越稳定。
4. 转速:电机的转速对于惯量的计算和影响也是一个重要因素。
在高速转动时,电机的惯量通常较大。
五、总结三相电机的惯量是描述电机转子对于转速变化的抵抗能力的重要参数。
通过对转子的质量、尺寸和负载的惯量进行计算或测量,可以得到电机的惯量值。
转动惯量一、基本概念惯量J 是一个常用的物理量,在负载被加速或减速的过程中中,是一个非常重要的参数。
转动惯量又可以称为惯性矩,它的的定义是:物体每一质点的质量m 与这一质点到旋转中心轴线的距离r 的二次方的乘积的总和,其数学表达式为:J =21m 2r 。
(1)在伺服控制系统中,大多数的传动机构具有圆柱状构件,因此,下面介绍几种圆柱状物体的转动惯量的计算。
图(1)和(2)分别描述了围绕着中心轴线旋转的空心圆柱体和实心圆柱体。
图(1)空心圆柱体 图(2)实心圆柱体(1)空心圆柱体的转动惯量计算公式为:J =21m (21R +22R )[牛∙米∙秒2] (2)(2)实心圆柱体的转动惯量计算公式为:J =21m 2R [牛∙米∙秒2] (3)对于己知重量为G 的物体,用(G /g )代替公式(2)和(3)中的m ,g 为重力加速度,我们可以分别得到:(1)空心圆柱体的转动惯量计算公式为:J =gR R G 2)(2221+[牛∙米∙秒2] (4)(2)实心圆柱体的转动惯量计算公式为:J =gGR 22[牛∙米∙秒2] (5)如果重量不知道,但知道旋转物体的体积V 和密度γ,则可用(V γ/g )代替公/式(2)和(3)中的m ,我们可以得到:(1)空心圆柱体的转动惯量计算公式为:J =)(24142R R gL -γπ[牛∙米∙秒2] (6)(2)实心圆柱体的转动惯量计算公式为:J =42R gL γπ[牛∙米∙秒2] (7)二、计算 举例说明1.换向器的惯性矩K JK J =81.910)(32244-⨯-⨯K K KiK l D D γπ[克∙厘米∙秒2]。
换向器的几何尺寸: 换向器的外径K D =0.6[厘米]; 换向器的内径Ki D =0.38[厘米]; 换向器的轴向长度K l =0.5[厘米]。
在几何尺寸和材料已知的情况下,换向器的惯性矩K J 为:K J =81.910)(32244-⨯-⨯K K KiK l D D γπ= =81.9105.75.0)38.06.0(32244-⨯⨯⨯-⨯π=4.079×510- [克∙厘米∙秒2],式中,K γ是换向器材料的平均比重,取K γ≈7.5[克/厘米3]。
惯量,也是伺服电机的一项重要指标。
它指的是转子本身的惯量,对于电机的加减速来说相当重要。
一般来说,小惯量的电机制动性能好,启动,加速停止的反应很快,适合于一些轻负载,高速定位的场合。
如果你的负载比较大或是加速特性比较大,而选择了小惯量的电机,可能对电机轴损伤太大,选择应该根据负载的大小,加速度的大小,等等因素来选择,一般有理论计算公式。
电机的转子惯量是电机本身的一个参数。
单从响应的角度来讲,电机的转子惯量应小为好。
但是,电机总是要接负载的,负载一般可分为二大类,一类为负载转矩,一类为负载惯量。
影响伺服电机响应的主要负载是负载惯量。
伺服电机驱动器对伺服电机的响应控制,最佳值为负载惯量与电机转子惯量之比为一,最大不可超过五倍。
通过机械传动装置的设计,可以使负载惯量与电机转子惯量之比接近一或较小。
当负载惯量确实有这样大,机械设计不可能使负载惯量与电机转子惯量之比小于五倍时,则可使用电机转子惯量较大的电机,即所谓的大惯量电机。
使用大惯量的电机,要达到一定的响应,驱动器的容量应要大一些。
例题
现在已知:一个直径是80的轴,长度为500,材料是钢材。
计算一下,当在0.1秒内使它达到500转/分的速度时所需要的力矩?
分析:知道轴的直径和长度,以及材料,我们可以查到钢材的密度,进而计算出这个轴的质量m,
由公式ρ=m/v
可以推出m=ρv=ρπr^2*L.
根据在0.1秒达到500转/分的角速度,我们可以算出轴的角加速度
β=△ω/△t=2πn/60/△t
电机轴我们可以认为是圆柱体过轴线,
所以J=mr^2/2。
所以M=Jβ
=mr^2/2*2πn/60/△t
=ρπr^2*L*r^2/2*2πn/60/△t
=7.8×10^3 ×3.14×0.04^2×0.5×0.04^2÷2 ×500×2π÷60÷0.1
=8.203145
单位J=kgm^2/s^2=N*m
三相异步电动机11kw-4级转速1480r/min。
根据公式:T2=9.55*P/n
解读为:输出力矩T2等于9.55乘以输出功率P,然后除以额定转速N,这样可以计算出电机的输出转矩为:70.9N.m计
算出两个值相比较即可
伺服电机中的大容量,中荣量,小容量什么意思?请朋友们详细介绍一下?
指电机功率大小,<1KW的叫小容量,1~10KW的中容量,>10KW的是大容量。