实验11 机构结构分析及运动简图
- 格式:pptx
- 大小:590.72 KB
- 文档页数:10
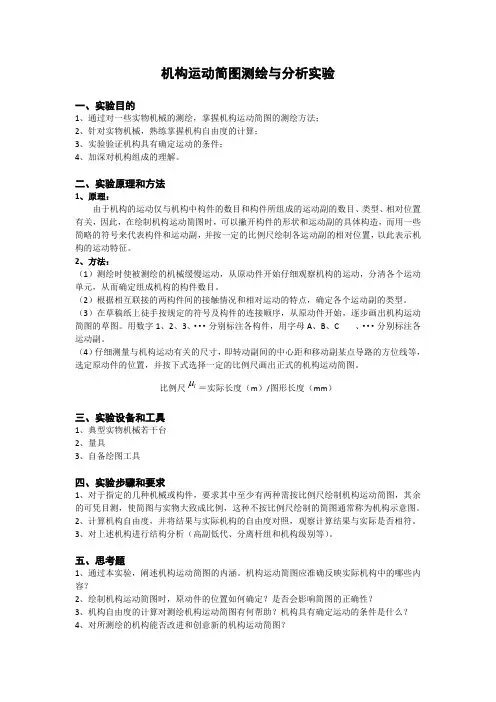
实验一、机构运动简图测绘与分析实验二、实验预习内容机构组成要素、机构自由度及机构运动简图方面的有关概念,见表1-1。
表1-1常用机构构件、运动副代表符号四、实验方法及步骤1.分析机构的运动情况,判别运动副的性质通过观察和分析机构的运动情况和实际组成,先搞清楚机构的原动部分和执行部分,使其缓慢运动,然后循着运动传递的路线,找出组成机构的构件,弄清各构件之向组成的运动副类型、数目及各运动副的相对位置。
2.恰当地选择投影面选择时应以能简单、清楚地把机构的运动情况表示清楚为原则。
一般选机构中多数构件的运动平面为投影面,必要时也可以就机械的不同部分选择两个或多个投影面,然后展开到同一平面上。
3.选择适当的比例尺根据机构的运动尺寸,先确定出各运动副的位置(如转动副的中心位置、移动副的导路方位及高副接触点的位置等),并画上相应的运动副符号,然后用简单的线条和规定的符号画出机构运动简图,最后要标出构件号数、运动副的代号字母以及原动件的转向箭头。
4.计算机构自由度并判断该机构是否具有确定运动在计算机构自由度时要正确分析该机构中有几个活动构件、有几个低副和几个高副。
并在图上指出机构中存在的局部自由度、虚约束及复合铰链,在排除了局部自由度和虚约束之后,再利用公式计算机构的自由度,检查计算的自由度数是否与原动件数目相等,以判断该机构是否具有确定运动.实验二、齿轮范成原理及齿轮参数测定齿轮加工方法基本上有两种—范成法和仿型法。
由于范成法可以用一把刀具加工出不同齿数和变位系数的渐开线齿轮,同时具有较高的加工精度,故以范成法应用最广。
范成法是利用一对齿轮互相啮合时其共轭齿廓互为包络线的原理来加工齿轮的。
加工时其中一个为刀具,另一个为轮坯,它们和一对真正的齿轮互相啮合传动一样保持着固定的角速比传动,同时刀具还沿着轮坯的轴向作切削运动,这样得到齿轮的齿廓就是刀具刀刃在各个位置的包络线。
若用渐开线作为刀具的齿廓,则包络线必为渐开线.由于实际加工时看不到刀刃在各个位置形成的过程,故通过齿轮范成仪来实现轮坯与刀具间的传动过程,并用铅笔将刀具刀刃的各个位置描绘在图纸上,这时我们就能清楚地观察到齿轮范成的过程。
课题十一凸轮机构运动参数的测定凸轮机构主要是由凸轮,从动件和机架三个基本构件组成的高副机构。
其中凸轮是一个具有曲线轮廓或凹槽的构件,一般为主动件,作等速回转运动或往复直线运动。
从动件与凸轮轮廓接触,传递动力和实现预定的运动规律故从动件的运动规律取决于凸轮轮廓曲线。
由于组成凸轮机构的构件数较少,结构比较简单,只要合理地设计凸轮的轮廓曲线就可以使从动件获得各种预期的运动规律。
凸轮机构能将主动件的连续运动转变为从动件的移动或转动,因而广泛用于各种机械中,特别是自动机械、自动线中的机械控制装置中。
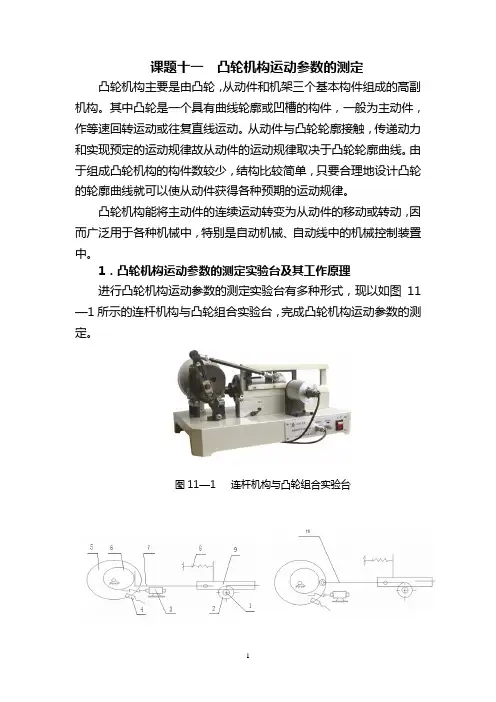
1.凸轮机构运动参数的测定实验台及其工作原理进行凸轮机构运动参数的测定实验台有多种形式,现以如图11—1所示的连杆机构与凸轮组合实验台,完成凸轮机构运动参数的测定。
图11—1 连杆机构与凸轮组合实验台a)b)图11—2 凸轮机构实验台的运动简图1--同步脉冲发生器 2—减速器 3--电机 4—传感器5--光栅盘 6--凸轮 7--平底直动从动件 8--回复弹簧9--滑块 10--滚子直动从动件如图11—2a)、b)所示,凸轮机构的实验台是电机、减速器、凸轮、直动从动件、滑块、传感器、同步脉冲发生器、光栅盘和回复弹簧等组成。
通过调速器调节电机的转速输出后,经蜗杆减速器带动凸轮转动,驱动从动件运动,其位移量通过直线位移传感器由模/数转换模块在嵌入式计算机系统的控制下,将位移量转换成数字信号,计算出其往复移动的周期、线速度、线加速度等机构运动参数。
也可更换不同廓线的盘形凸轮,从而调节从动件的偏心距。
2.凸轮机构运动参数的测定实验注意事项(1) 调节电机的转速时应缓慢转动调速旋钮,在关闭实验台电源前,应将电动机的转速调到最小。
(2) 用手转动凸轮盘1~2 周,检查各运动构件的运行状况,各螺母紧固件应无松动,各运动构件应无卡滞现象。
(3) 测试时,凸轮的转速不应过高,以免产生大的冲击,造成零件损坏。
(4) 调节从动件偏心距时,偏心距不宜过大,否则有可能使凸轮机构卡死,造成零件损坏。
机构运动简图
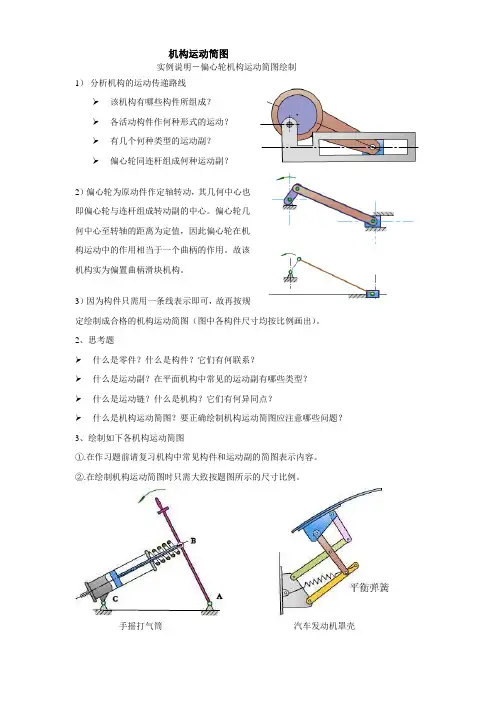
实例说明-偏心轮机构运动简图绘制
1)分析机构的运动传递路线
➢该机构有哪些构件所组成?
➢各活动构件作何种形式的运动?
➢有几个何种类型的运动副?
➢偏心轮同连杆组成何种运动副?
2)偏心轮为原动件作定轴转动,其几何中心也
即偏心轮与连杆组成转动副的中心。
偏心轮几
何中心至转轴的距离为定值,因此偏心轮在机
构运动中的作用相当于一个曲柄的作用。
故该
机构实为偏置曲柄滑块机构。
3)因为构件只需用一条线表示即可,故再按规
定绘制成合格的机构运动简图(图中各构件尺寸均按比例画出)。
2、思考题
➢什么是零件?什么是构件?它们有何联系?
➢什么是运动副?在平面机构中常见的运动副有哪些类型?
➢什么是运动链?什么是机构?它们有何异同点?
➢什么是机构运动简图?要正确绘制机构运动简图应注意哪些问题?
3、绘制如下各机构运动简图
①.在作习题前请复习机构中常见构件和运动副的简图表示内容。
②.在绘制机构运动简图时只需大致按题图所示的尺寸比例。
手摇打气筒汽车发动机罩壳
泵手动冲孔机
颚式破碎机偏心轮传动机构4、习题答案
手摇打气筒(弹簧不为构件)颚式破碎机
泵手动冲孔机汽车发动机罩壳偏心轮传动机构
机构运动简图校内课程校外实训
一、绘制如下各机构运动简图(在绘制机构运动简图时只需大致按题图所示的尺寸比例)
手摇打气筒汽车发动机罩壳
泵手动冲孔机
颚式破碎机偏心轮传动机构班级:姓名:学号:。
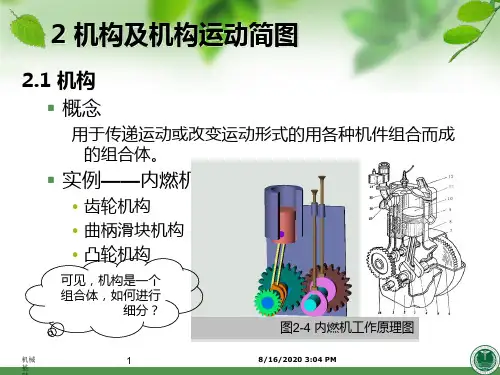
第二章机构的结构分析——机构运动简图用运动副的代表符号及国标规定的常用机构的运动简图符号和构件的表示方法,将机构的运动情况表示出来,这种简化图形就称为机构运动简图。
用运动副的代表符号及国标规定的常用机构的运动简图符号和构件的表示方法,将机构的运动情况表示出来,这种简化图形就称为机构运动简图。
●机构运动简图必须与原机械具有相同的运动特性●影响机构运动的尺寸(运动尺寸),及各构件之间的联接关系需要反映在简图上。
常用机构运动简图符号在机架上的电机齿轮齿条传动带传动圆锥齿轮传动链传动圆柱蜗杆蜗轮传动凸轮传动外啮合圆柱齿轮传动棘轮机构内啮合圆柱齿轮传动一般构件的表示方法机构运动简图应满足的条件:1.构件数目与实际相同2.运动副的性质、数目与实际相符3.运动副之间的相对位置以及构件尺寸与实际机构成比例。
机构示意图4.构件用1、2、3…数字表示,运动副处用大写英文字母A、B、C表示,机架用斜线表示,原动件用箭头表示。
S3123S’3θ1A CD B二、画法步骤1. 搞清该机械的实际构造和运动情况。
先定出原动件和工作部分,再把两者之间的传动部分搞清楚。
从而了解该机械由哪些构件组成,各构件之间形成了何种运动副。
2. 选择合适的投影面(多数构件的运动平面)。
3. 选择合适的比例尺,定出各运动副之间的相对位置。
L μ=实长图长4. 用简单的线条和各种运动副符号绘制简图。
例1:绘制图示偏心轮机构的运动简图。
S 3123θ1ACD B例:绘制下图机构运动简图。
小结§2-2机构运动简图问题?第二章机构的结构分析——机构具有确定运动的条件§2-3机构具有确定运动的条件问题:取运动链中某个构件为机架,其余构件在什么条件下才具有确定运动?给定一个独立运动参数:其余构件有确定位置。
四杆机构五杆机构给定一个独立运动参数:机构没有确定运动。
给定两个独立运动参数:机构有确定运动。
机构具有确定运动时所必须给定的独立运动参数的数目称为机构的自由度。

实验一机构运动简图绘制与分析一、实验目的1.熟悉并掌握机构运动简图绘制的原理和方法,学会根据实际机械和模型绘制机构运动简图的技能;2.加深和巩固机构自由度的计算方法,并检验机构是否具有确定运动;3.加深对平面机构结构分析的了解。
二、实验内容及要求1.以指定的3~4种机构模型或机器为研究对象,进行机构运动简图的绘制;2.分析所画各机构的构件数、运动副类型和数目,计算机构的自由度,并验证它们是否具有确定的运动;3.进行机构的结构分析。
三、实验设备和工具1.各种机器实物和模型;2.学生自备铅笔、直尺、圆规、橡皮、草稿纸等;四、实验原理机器和机构都是由若干构件及运动副组合而成。
而机构的运动是由原动件的运动规律、联接各构件的运动副类型和机构的运动尺寸(即各运动副间相对位置尺寸)来决定的。
因此,在绘制机构运动简图时,可以撇开构件的形状和运动副的具体构造,而用一些简单的线条来代替构件。
构件的表示法见图1。
用规定的符号代表运动副,并按一定的比例尺表示运动副的相对位置,以此表明机构的运动特征。
常用运动符号示例见表1-1。
五、实验步骤1、确定组成机构的构件数:缓慢转动机器,沿着运动传递的线路仔细看清各构件间的相对运动(有些相互连接构件间的相对运动非常微小),从而确定组成机构的构件数目。
2、确定运动副的类型:根据相互连接的两构件间的接触情况及相对运动特点,确定各个运动副的类型。
3、选定视图平面:一般选择与多数构件运动平面平行的平面为视图平面。
4、绘制机构示意图的草图:凭目测在草稿纸上徒手按规定的运动副代表符号,从原动件开始,按各构件的连接次序,用简单的线条代表构件,逐步画出机构示意图的草图。
用数字1、2、3……分别标准各构件,用字母A 、B 、C ……分别标准各运动副。
5、计算机构的自由度数,并将计算结果与实际机构的自由度相对照,观察二者是否相符。
机构自由度的计算公式:F=3n-2PL-PH (式中: n 为活动构件的数目;PL 为低副的数目; PH 为高副的数目。