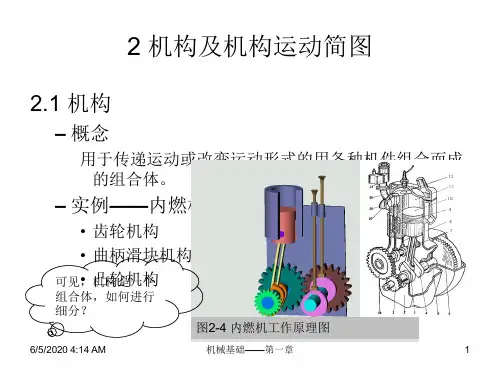
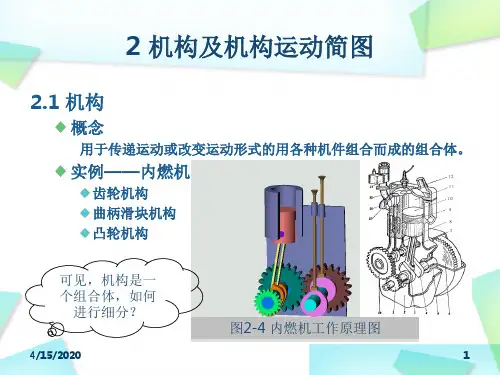
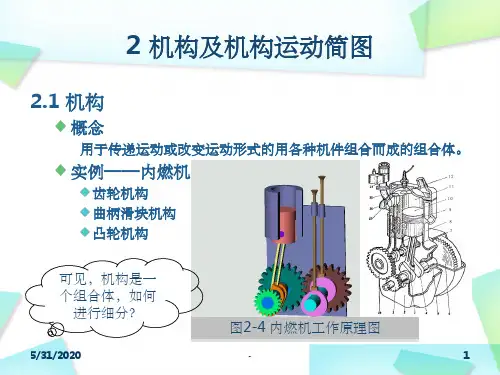
机构及机构运动简图
- 格式:ppt
- 大小:4.78 MB
- 文档页数:36
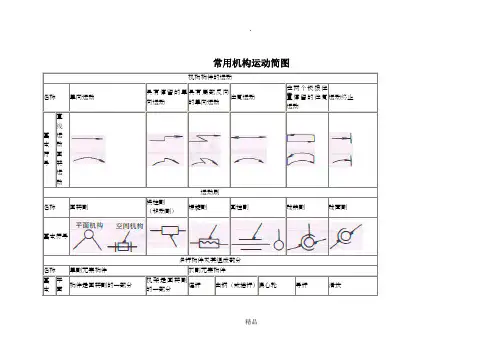
常用机构运动简图机构构件的运动
名称单向运动具有停留的单
向运动
具有局部反向
的单向运动
往复运动
在两个极限位
置停留的往复
运动
运动终止
基本符号直
线
运
动
回
转
运
动
运动刷
名称回转副棱柱副
(移动副)
螺旋副圆柱副球销副球面副
基本符号
多杆构件及其组成部分名称单副元素构件双副元素构件
基本平
面
构件是回转副的一部分
机架是回转副
的一部分
连杆曲柄(或摇杆)偏心轮导杆滑块
精品
精品
多杆构件及其组成部分
基
本
符
号
及
可
用
符
号
空
间
机
构
单副元素构件双副元素构件
构件是回转副的一部分
机架是回转副的
一部分
连杆曲柄(或摇杆)偏心轮导杆滑块
多杆构件及其组成部分
名称三副元素构件机构示例
精品
基本符号
及可用符
号
凸轮机构
名称盘形凸轮移动凸轮空间凸轮
圆柱凸轮圆锥凸轮双曲面凸轮
基本符号
可用符号
凸轮从动杆
名称尖顶从动杆曲面从动杆滚子从动杆平底从动杆基本符号
槽轮机构和棘轮机构
精品
精品
如有侵权请联系告知删除
,感谢你们的配合!
外啮合内啮合
基本符号及可
用符号
名称
棘轮机构外啮合内啮合
基本符号及可
用符号
精品。