论顺序动作回路
- 格式:doc
- 大小:608.00 KB
- 文档页数:4
一、实验目的1. 理解和掌握顺序动作回路的基本原理及工作方式。
2. 学会搭建顺序动作回路,并对其进行调试。
3. 通过实验,了解顺序动作回路在实际应用中的重要性。
二、实验原理顺序动作回路是一种多执行元件动作控制回路,主要用于实现多个液压执行元件(如液压缸或液压马达)按照预定顺序依次动作。
在顺序动作回路中,通过调节电磁阀的工作时间、压力或行程等参数,实现对执行元件动作顺序的控制。
三、实验器材1. 双作用液压缸2个2. 电磁阀2个3. 液压泵1台4. 导线、电源等5. 实验台架四、实验步骤1. 搭建顺序动作回路:- 将液压泵、电磁阀、液压缸和导线等连接起来,搭建顺序动作回路。
- 确保回路连接正确,无短路、断路等现象。
2. 调试顺序动作回路:- 打开液压泵电源,观察液压缸的动作情况。
- 调节电磁阀的工作时间,使两个液压缸按照预定顺序依次动作。
- 调整压力或行程等参数,确保动作顺序正确。
3. 观察和分析实验现象:- 观察液压缸的动作顺序,分析实验结果。
- 记录实验数据,如液压缸的动作时间、压力等。
4. 拆除实验器材:- 实验结束后,拆除实验器材,整理实验台架。
五、实验结果与分析1. 实验结果:- 成功搭建了顺序动作回路,并实现了两个液压缸按照预定顺序依次动作。
- 实验过程中,通过调节电磁阀的工作时间,使液压缸的动作顺序符合预期。
2. 分析:- 顺序动作回路在实际应用中具有重要意义,如自动化机床、液压电梯等设备中,需要多个执行元件按照预定顺序动作,以保证设备的正常运行。
- 通过调节电磁阀的工作时间、压力或行程等参数,可以实现对执行元件动作顺序的控制,从而满足实际应用需求。
六、实验结论1. 顺序动作回路是一种重要的多执行元件动作控制回路,在自动化设备中具有广泛应用。
2. 通过实验,掌握了顺序动作回路的基本原理、搭建方法和调试技巧。
3. 实验结果表明,通过调节电磁阀的工作时间,可以实现对执行元件动作顺序的控制,确保设备正常运行。
行程控制顺序动作回路实验心得
行程控制顺序动作回路是一种广泛应用于生产制造和自动化领域的电气控制系统,它能够实现对机械和设备的多种运动方式的控制,提高生产效率,减少操作失误。
在实际应用中,行程控制顺序动作回路还是常见的工业自动化控制系统。
在进行行程控制顺序动作回路实验时,需要注意以下10点心得:
1.实验前必须认真阅读实验指导书,了解实验原理、实验步骤、仪器使用方法等,做到心中有数。
2.按照实验前的检查清单检查设备是否全部准备就绪,特别是检查电压、电流是否处于正常范围内,防止短路、漏电等安全事故的发生。
3.在进行实验前,要进行好防护措施,如戴好绝缘手套、穿好绝缘鞋,以防止电流将人体带来的安全事故。
4.在进行实验时,应先将所用设备的电源断开,以免因误操作而造成设备损坏造成资源浪费。
5.在进行实验时,应按照实验步骤进行,不要急于求成,首先要明确自己所要达成的目标,并逐步进行调试、测试,一步步来,尽量保证实验的顺利进行。
6.在测试连接电路时,应尽量使用万用表、电压表、电流表等仪器进行检测,认真比对每个设备的反馈信号,如电流、电压等,判断电路的正常运作。
7.在进行实验调试时,要尽量避免对电路进行过多的修改,以免电路不能正常运行,或是出现不明的故障。
8.在测试实验结果时,需要进行详细的记录,准确描述测试过程和测试结果,如若存在问题,需要找出问题的原因并加以解决。
9.在实验结束后,应对仪器设备进行归档处理,及时清理实验现场,排除潜在的安全隐患和威胁。
10.实验结束后,可对实验进行总结,对实验过程中的措施和方法进行评估,优化实验和过程,同时总结出实验心得和体会。
顺序动作回路工作原理顺序动作回路是电气控制中常用的一种电路,用于实现多个动作元件按特定顺序工作的控制。
它通常由多个继电器和其它电气元件组成,通过电气信号的传递和切换,实现各个动作元件之间的顺序控制。
本文将详细介绍顺序动作回路的工作原理。
顺序动作回路主要由三个部分组成:输入电路、输出电路和控制电路。
输入电路的作用是接收输入信号,输出电路的作用是控制动作元件的工作,控制电路则是连接输入和输出电路的关键部分。
下面将逐一介绍这些部分的工作原理。
首先是输入电路。
输入电路通常由按钮、传感器等电气元件组成,用于接收外部输入信号。
当某个按钮按下或传感器检测到特定条件时,输入电路中的继电器被触发,产生相应的输出信号。
这些输出信号将传递到控制电路中,以启动相应的顺序动作。
其次是控制电路。
控制电路起到连接输入电路和输出电路的作用,是顺序动作回路的核心部分。
控制电路一般由继电器、计数器、计时器等组成。
当输入电路触发时,控制电路中的继电器会根据设计好的逻辑关系进行切换,完成一个动作后切换到下一个动作。
计数器和计时器等辅助元件可以用于控制动作的次数和时间间隔。
最后是输出电路。
输出电路通常由继电器或电磁阀等元件组成,用于控制动作元件的运动。
当控制电路中的继电器切换到相应的位置时,输出电路会接通或断开相应的电源,从而使动作元件进行相应的动作。
例如,顺序动作回路可以用于控制一个机器人的动作,输出电路可以控制机器人的手臂、腿部和头部等部位的运动。
顺序动作回路的工作原理可以简单概括为:输入信号触发输入电路中的继电器,继电器通过控制电路的切换实现动作元件的顺序控制,输出电路将控制信号传递给动作元件,使其按照设计好的顺序进行相应的动作。
顺序动作回路在工业生产中起着重要作用。
它可以用于自动化生产线中的工序控制,保证各个工序按照既定顺序完成。
例如,在汽车组装生产线中,顺序动作回路可以用于控制机器臂、焊接设备和喷漆设备等的动作,确保车辆的各个零部件按正确的顺序被装配和加工。
顺序动作回路工作原理-标准化文件发布号:(9556-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII顺序动作回路顺序动作回路的作用是保证执行元件按照预定的先后次序完成各种动作。
按照控制方式不同,可以分为行程控制和压力控制两种。
1.行程控制顺序动作回路图7.32为行程阀控制的动作回路,在图示状态下,1, 2两油缸活塞均在左端。
当推动手柄,使阀3左位工作,缸1的活塞右行,完成动作①;当缸1的活塞运动到终点后挡块压下行程阀4,缸2右行,完成动作②;手动换向阀C复位后,实现动作③;随着挡块的后移,阀4复位,缸2活塞退回,实现动作④。
利用行程阀控制的优点是位置精度高、平稳可靠;缺点是行程和顺序不容易更改图7. 33为行程开关控制的动作回路,在图示状态下,1, 2两油缸活塞均在左端。
电磁阀1YA通电时使阀左位工作,缸I的活塞右行,完成动作①;当缸1的活塞运动到终点后触动行程开关2S,使电磁阀2YA通电换到左位,缸2的活塞右行,完成动作②;当缸2的活塞运动到终点后触动行程开关4S,电磁阀1YA断电复位,实现动作③;油缸1的活塞运动到终点后触动行程开关15,电磁阀2YA断电复位,缸2的活塞退回实现动作④。
行程开关控制的顺序动作回路优点是位置精度高,调整方便,且可以更改顺序,所以应用较广,适合于工作循环经常要更改的场合。
2.压力控制顺序动作回路利用液压系统中的工作压力变化控制各个执行元件的顺序动作是液压系统独具的控制特性。
压力控制的优点是动作灵敏,安装布置比较方便;缺点是可靠性不高,位置精度低。
图7.34为顺序阀控制的动作回路。
当换向阀左位接入回路且顺序阀4的调定压力大于液压缸活塞伸出最大工作压力时,顺序阀4关闭,压力油进入液压缸1的左腔,缸1的右腔经顺序阀3的单向阀回油,实现动作①;当缸1的伸出行程结束到达终点后,压力升高,压力油打开顺序阀4进人液压缸2的左腔,缸2的右腔回油,实现动作②;同样道理,当换向阀右位接入回路且顺序阀3的调定压力大于液压缸活塞缩回最大供油压力时,顺序阀3关闭,压力油进入缸2的右腔,缸2的左腔经顺序阀2的单向阀回油,实现动作③;当液压缸2的缩回行程结束到达终点后,压力升高,压力油打开顺序阀3进入缸1的右腔,缸I 的左腔回油,实现动作④。
顺序动作回路的功能及实现方法顺序动作回路 (Sequential Function Chart,简称SFC) 是工业自动化控制系统中重要的编程语言,具有严谨的结构及逻辑关系,适用于描述复杂的控制要求。
SFC可将整个控制程序分为多个步骤,每一步可以分解为若干个操作,然后按照一定的顺序执行,从而完成对系统的控制。
一、功能SFC常用于描述控制要求复杂的流程,如各类液压、气动、电气等控制系统的自动化控制。
其主要功能如下:1. 分级控制SFC可将控制程序根据复杂程度进行不同级别的分解,使控制程序更易于维护及升级。
2. 逻辑控制通过SFC的状态转移和分支控制,对信号、事件、状态等进行逻辑判断和控制。
3. 时间控制SFC允许用户定义时间控制,例如时间延迟、周期等,并可与逻辑控制结合使用,实现更精确的控制。
4. 异常处理SFC提供了异常情况的处理机制,可以进行异常检测和处理,保证系统的安全性和稳定性。
二、实现方法SFC主要由三个部分组成:步骤、转移条件和动作。
1. 步骤步骤是指程序执行的基本单元,每个步骤都有一个特定的名称和标签,用于标识和引用。
步骤可以包括一个或多个动作,如输出、计算、比较等。
2. 转移条件转移条件用于控制步骤之间的转移,根据条件的满足情况,可以跳转到不同的步骤。
SFC中常用以下条件进行控制:- 过渡条件:在前一个步骤执行完成之后,根据过渡条件来跳转到下一个步骤。
- 异常条件:当程序执行过程中出现异常情况时,根据特定的异常处理程序来处理。
- 暂停条件:可以根据需要设置程序的暂停和恢复条件,以便在特定时刻可以暂停程序执行。
3. 动作动作指在步骤中进行的具体操作,如输出信号、计算、比较等。
SFC中的动作包括以下类型:- 输出动作:用于控制执行机构的动作,如开关、阀门等。
- 计算动作:用于进行数学运算,如加减乘除、取余等。
- 比较动作:用于进行值的比较,如大于、小于、等于等。
SFC的实现包括以下步骤:1. 特定对象的建立首先需要定义被控制的对象,包括控制系统的输入输出、触发条件等,然后建立该对象的模型。
顺序动作回路工作原理顺序动作回路是自动控制系统中常用的一种控制方式,它通过控制器对一系列动作进行顺序控制,从而完成特定的操作。
顺序动作回路广泛应用于工业生产中的自动化设备及机械控制系统中。
顺序动作回路的工作原理可以简单描述为如下几个步骤:1. 输入信号检测:在顺序动作回路中,输入信号通常来自于传感器或控制开关等设备。
这些输入信号可以是物理量、电信号或逻辑信号等。
在工作开始之前,控制器首先需要检测输入信号,确定需要进行的操作。
2. 顺序控制逻辑:基于输入信号的检测结果,控制器根据预先设定的逻辑规则进行顺序控制。
顺序控制逻辑通常通过逻辑电路、程序控制或算法等方式实现。
根据具体的应用需求,控制器可以根据不同的输入信号顺序控制机械装置的运行顺序,以实现不同的操作目标。
3. 动作执行:一旦顺序控制逻辑确定了需要进行的动作,控制器将按照设定的顺序发送相应的指令,控制机械装置或自动化设备进行相应的动作。
这些指令通常通过电磁阀、电机驱动器或其他执行元件发送到机械装置上。
4. 动作完成检测:在顺序动作回路的工作中,需要对每个动作的完成情况进行检测以确保整个顺序过程的正确性和完整性。
通常情况下,这种检测机制可以通过传感器或开关信号来实现。
一旦检测到相应的完成信号,控制器将进入下一个动作的执行过程。
5. 状态监控和故障处理:在顺序动作回路中,状态监控和故障处理是至关重要的一部分。
通过实时监测各个动作的完成状态和设备的工作情况,控制器可以及时发现设备故障或异常情况,并采取相应的应对措施,例如报警、停机或切换备用设备等。
顺序动作回路的工作原理基于输入信号检测、顺序控制逻辑、动作执行、动作完成检测和状态监控与故障处理的循环过程。
通过合理设计和配置,顺序动作回路可以实现多个动作的顺序控制和自动化运行,从而提高生产效率、降低人力成本,并确保工作过程的安全性和可靠性。
需要注意的是,在设计和实施顺序动作回路时,应考虑相关的安全规范和标准,确保系统的可靠性和稳定性。
顺序动作回路实验报告顺序动作回路实验报告引言顺序动作回路是一种常见的电气控制系统,它通过按照一定的顺序控制不同的动作,实现特定的功能。
本次实验旨在通过搭建一个简单的顺序动作回路,探究其工作原理和应用。
实验材料和方法本次实验所需材料包括电源、继电器、按钮开关、灯泡等。
首先,我们将电源连接到继电器的线圈上,再通过按钮开关控制继电器的触点,最后将灯泡连接到继电器的输出端。
实验过程中,我们将按照特定的顺序操作按钮开关,观察灯泡的亮灭情况。
实验结果在实验过程中,我们按照以下顺序操作按钮开关:先按下按钮A,然后按下按钮B,最后按下按钮C。
实验结果显示,当按下按钮A时,灯泡亮起;当按下按钮B时,灯泡继续保持亮起状态;当按下按钮C时,灯泡熄灭。
这表明顺序动作回路按照我们设定的顺序执行了相应的动作。
讨论和分析从实验结果可以看出,顺序动作回路具有按照特定顺序执行动作的能力。
这种控制方式在实际生活中有着广泛的应用。
例如,在自动化生产线中,顺序动作回路可以用来控制机器的启动和停止,保证生产过程的顺利进行。
此外,在家庭电器中,顺序动作回路也可以用来控制电器的开关顺序,提高使用的便捷性和安全性。
顺序动作回路的实现原理主要依靠继电器的工作原理。
继电器是一种电磁开关,通过控制线圈的通断来控制触点的开闭。
在本次实验中,当我们按下按钮A时,电流通过线圈,使得继电器的触点闭合,从而让电流通过触点流向灯泡,灯泡亮起。
当我们按下按钮B时,电流依然通过线圈,触点保持闭合,灯泡继续保持亮起状态。
当我们按下按钮C时,电流断开,线圈不再通电,触点打开,灯泡熄灭。
顺序动作回路的设计需要考虑到动作的顺序和时间间隔。
在本次实验中,我们设定了按钮A、B和C的按下顺序,以及相应的灯泡状态。
然而,在实际应用中,顺序动作回路的设计可能更为复杂,需要考虑到更多的因素。
例如,在自动化生产线中,可能需要设定多个动作的顺序和时间间隔,以适应不同的生产需求。
结论通过本次实验,我们成功搭建了一个简单的顺序动作回路,并观察到了其按照设定的顺序执行动作的能力。
顺序动作回路顺序动作回路的作用是保证执行元件按照预定的先后次序完成各种动作。
按照控制方式不同,可以分为行程控制和压力控制两种。
1.行程控制顺序动作回路图7.32为行程阀控制的动作回路,在图示状态下,1, 2两油缸活塞均在左端。
当推动手柄,使阀3左位工作,缸1的活塞右行,完成动作①;当缸1的活塞运动到终点后挡块压下行程阀4,缸2右行,完成动作②;手动换向阀C复位后,实现动作③;随着挡块的后移,阀4复位,缸2活塞退回,实现动作④。
利用行程阀控制的优点是位置精度高、平稳可靠;缺点是行程和顺序不容易更改。
小型液压机图7. 33为行程开关控制的动作回路,框架式液压机,在图示状态下,1, 2两油缸活塞均在左端。
电磁阀1YA 通电时使阀左位工作,缸I的活塞右行,完成动作①;当缸1的活塞运动到终点后触动行程开关2S,使电磁阀2YA通电换到左位,缸2的活塞右行,完成动作②;当缸2的活塞运动到终点后触动行程开关4S,电磁阀1YA断电复位,实现动作③;油缸1的活塞运动到终点后触动行程开关15,电磁阀2YA断电复位,缸2的活塞退回实现动作④。
行程开关控制的顺序动作回路优点是位置精度高,调整方便,且可以更改顺序,所以应用较广,适合于工作循环经常要更改的场合。
2.压力控制顺序动作回路利用液压系统中的工作压力变化控制各个执行元件的顺序动作是液压系统独具的控制特性。
压力控制的优点是动作灵敏,安装布置比较方便;缺点是可靠性不高,位置精度低。
图7.34为顺序阀控制的动作回路。
当换向阀左位接人回路且顺序阀4的调定压力大于液压缸活塞伸出最大工作压力时,顺序阀4关闭,压力油进人液压缸1的左腔,缸1的右腔经顺序阀3的单向阀回油,实现动作①;当缸1的伸出行程结束到达终点后,压力升高,压力油打开顺序阀4进人液压缸2的左腔,缸2的右腔回油,实现动作②;同样道理,当换向阀右位接人回路且顺序阀3的调定压力大于液压缸活塞缩回最大供油压力时,顺序阀3关闭,压力油进人缸2的右腔,缸2的左腔经顺序阀2的单向阀回油,实现动作③;当液压缸2的缩回行程结束到达终点后,压力升高,压力油打开顺序阀3进人缸1的右腔,缸I的左腔回油,实现动作④。
论顺序动作回路
在由多缸组成的液压系统中,往往需要安照一定的要求实现各缸之间的顺序动作。
例如,自动车床中车刀的纵横向运动,夹紧机构的定位和夹紧等。
按其控制方式不同,顺序动作回路可分为:压力控制,行程控制和时间控制三类。
其中前两类较多。
下面我们就着重研究一下压力控制和行程控制阀的顺序动作回路
1 液压控制的顺序动作回路。
压力控制就是利用油路本身的压力变化来控制液压缸的先后动作顺序,它主要压力继电器或顺序控制阀来实现。
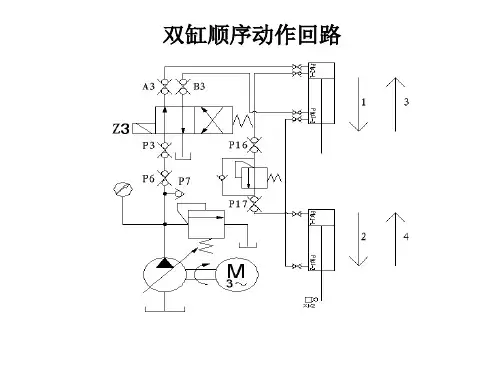
如图6——33,是采用两个单项顺序阀的顺序动作回路,其中单项顺序阀3控制两液压缸进给时的先后动作,单项顺序阀7控制两液压缸退回时的先后动作。
该回路中,如果电磁铁2YA得电,则三项四通阀8右位接入系统,压力油先经单向阀6进入缸1的无杆腔,缸1的有杆腔油液则经阀7中的单向阀再经过阀8的右端,流回油箱。
此时由于系统压力较低,阀3中顺序阀关闭,缸1的活塞先动作,进行夹紧。
当缸1的活塞运动到终点后使系统油压升高,从而达到单项顺序阀3的调定压力则顺序阀开启,压力油过阀3进入缸2的无杆腔,缸2的活塞动作,缸2的有杆腔中的油液经调速阀4在经过阀8右位,流回油箱。
缸2的活塞向左移动,开始镗孔。
当缸2活塞左移到终点后让2YA失电1YA得电,
此时三项四通阀8左位接入系统,压力油先经阀5中的单向阀进入缸2的有杆腔而缸2的无杆腔中的油液经过阀3的单向阀再经过阀8流回油箱缸2活塞先缩回动作。
当缸2活塞缩回到终点系统油压升高达到单项顺序阀7的调定压力,则顺序阀开启,压力油过阀7进入缸1的有杆腔,缸1的无杆腔中油液则经过阀6的单向阀再经过阀8流回油箱,从而缸1活塞返回,完成一次顺序动作循环。
需要注意的:
在液压控制的顺序动作回路中顺序阀的位置很关键,应加在后运动的液压缸上,这样才能实现液压缸的顺序动作,完成想要的工作顺序。
在设置顺序阀的开启压力时,应注意设定其开启压力大于前动作缸的工作压力0.8——1Mpa
2 行程控制阀的顺序动作回路。
行程控制顺序动作回路是利用运动部件到达一定位置时,通过发出信号来控制各液压缸的先后动作顺序。
它可以采用行程开关,行程阀等来实现。
如图6——34,是采用电气行程开关控制电磁换向阀通断实现顺序动作的回路。
该回路中,当电磁铁1YA得电,缸A活塞右行动作直至行程终点了,由挡铁触动行程开关2ST 得电,发出信号使电磁铁1YA失电,3YA得电,缸B活塞杆右行进给。
当缸B右行至终点,由挡铁触动4ST得电,发
出信号使电磁铁3YA断电,2YA得电,缸A活塞左行退回至左限位时触动1ST使电磁铁2YA断电,4YA得电缸B左行退回。
这样就完成了缸A,缸B顺序进退的一次自动循环。
该回路采用电气行程开关进行自动控制,其工作行程长短和动作顺序改变都很方便,此外,通过电气“互锁“功能使液压缸的顺序动作非常可靠。
需要注意的:
压力继电器的位置决定了缸的伸出和缩回的顺序,因此,应注意合理安排。
一般压力继电器应接在前动作缸上由于压力继电器的顺序动作回路不是很长用,所以在此就不加以详细的说明了,如果有感兴趣的同学可以参考相关书籍自己看看,不过在自学的时候应注意:实际使用中,为防止压力继电器在前一动作液压缸到达行程终点前发生错误动作,压力继电器的调定值应比前一动作液压缸的最大工作压力高0.3——0.5Mpa,同时,为了能使压力继电器可靠的发出信号,其压力调定值又应该比溢流阀的调定压力低0.3——0.5Mpa。
顺序动作回路在很多方面都有广泛的应用,因此应对顺序动作回路有较深的学习。
想学好顺序动作回路不仅要好好分析各经典回路的工作原理,还要对各种阀有所理解,吃透各种阀的不同应用和工作原理。
在分析系统工作原理时,不仅要理解系统的工作应用
场合,还应注意在实际应用中各阀的压力不同范围和先后动作要求。
以在实际应用中更好的使用顺序动作回路。