无人直升机总体设计
- 格式:pptx
- 大小:3.28 MB
- 文档页数:73
无人直升机设计关键技术摘要:在信息技术的驱动下,无人机已经成为发展最快的飞机类型。
作为无人机体系中的重要分支——无人直升机,因其结构紧凑、灵活的转换,盘旋,垂直起飞和降落,在低速低性能,高机动性和安全性等,形成了覆盖目标、情报、监视、战场监视、通信中继、目标指示、指导和摧毁,电子干扰和对抗,灾难情况调查、气象观测、调查的土地和资源,测绘,地理信息动力巡逻和管道巡逻系统在军事、民用等领域的任务产品。
然而,由于一些独特的关键技术尚未完全突破,无人直升机的发展落后于无人机系统的另一个分支——固定翼无人机。
关键词:无人直升机;设计;关键技术;由于其结构紧凑、转场灵活、空中悬停、垂直起降、低空低速性能、机动性和安全性高等特点,已经形成了覆盖靶标、情报侦察、战场监视、通信中继、目标指示、引导与摧毁、电子干扰与对抗、灾害灾情调查、气象探测、国土资源调查、地理信息测绘、电力巡线和输油管线巡线等军、民用任务领域的产品体系。
一、飞行控制与导航技术1.从飞行控制和导航技术来看,由于无人直升机作为受控对象具有多变量、非线性、强耦合性、时变性等特性,是一种稳定性差、不易操纵和难以控制的飞行器。
所以目前飞行控制和导航技术是制约无人直升机投入实际应用中的瓶颈,也是一项决定无人直升机飞行品质的一项关键技术。
美军根据飞行控制与导航技术水平的高低,按照发展型谱把无人直升机的能力分类定义成十级,分别是:远程引导飞行控制能力、实时故障诊断与监控能力、飞行条件和故障的适应能力、机上航线再规划、集群配合、集群战术再规划、集群战术目标、分布式控制、集群战略目标和完全自主集群。
概括起来就是无人直升机的飞行控制与导航技术水平可分为四类:遥控飞行技术、自动飞行技术、自主飞行技术和智能飞行技术。
无人直升机遥控飞行需要地面人员操纵,按人工指令飞行,其中包括连续指令和离散指令控制飞行两种状态。
自动飞行需要预编程机载飞控系统,无人直升机按编定的程序指令飞行,具有自动导航功能,可按照程序设定实现自动起飞、航线飞行和着陆(舰)。

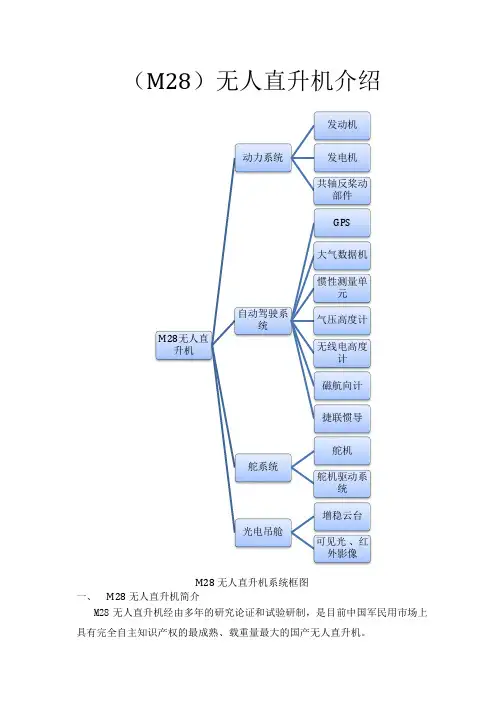
(M28)无人直升机介绍M28无人直升机系统框图一、 M28无人直升机简介M28无人直升机经由多年的研究论证和试验研制,是目前中国军民用市场上具有完全自主知识产权的最成熟、载重量最大的国产无人直升机。
M28无人直升机动力系统发动机发电机共轴反桨动部件自动驾驶系统GPS 大气数据机惯性测量单元气压高度计无线电高度计磁航向计捷联惯导舵系统舵机舵机驱动系统光电吊舱增稳云台可见光、红外影像M28无人直升机参数介绍旋翼直径 5.1m机身高度 2.2m机身宽度 1.5m总重380kg(海平面)有效载荷80kg (海平面)续航时间3~4小时动升限3000m最大飞行速度120km/s巡航速度100km/s悬停定位水平方向CEP(圆概率误差)< 5m 悬停定位高度方向误差<1.8m直线航线飞行误差<15m数传电台有效距离10-180KmM28总体尺寸设备舱尺寸如图所示:M28外型图M28总体尺寸M28设备舱尺寸完全自主起降M28无人直升机采用完全自主垂直起降系统,不需要人为干预即可以完成从起飞、航线飞行到降落的整个过程。
有效载荷80公斤M28无人直升机以反桨共轴直升机为机体,无尾桨的气动特点使其结构紧凑,动力效率高,避免了飞行中比例高达75%的由尾桨失效引起的事故,尤其适用于海上平台起降。
其有效商用载荷达到80公斤,一个外挂架和一个尺寸为50cm ×50cm×40cm的载荷舱均可使用。
多余度设计M28无人直升机采用HeliAP自动驾驶仪和整体设计的机身,具有可靠的多余度飞行控制和舵系统,用户通过10-180公里的可靠数据链路和简洁的图形用户界面甚至可以操纵直升机在雨中完成从起飞到着陆的整个任务。
M 28无人直升机的机身采取单体横造的高级复合材料外壳,它提供了卓越的强度/重量比例,动力传动系统原件航空级铝钛材料。
北京拓云海智能设备技术有限公司正与民航局密切合作,确保了设计、生产和系统的运作符合有关民航条例。
342第二十届(2004)全国直升机年会论文M22小型无人直升机的设计特点陈 铭 胡继忠(北京航空航天大学 航空科学与工程学院)摘要:本文论述了共轴式直升机M22总体设计中的几个问题,包括总体参数选择、气动布局、双旋翼之间的气动干扰问题。
经过试验和改进,使该机的气动性能、稳定性和操纵性达到要求。
关键词:共轴式直升机;总体设计;试验;总体参数一、直升机型式和总体参数选择随着我国国民经济的发展,越来越多的部门需要一种载荷在10~20公斤,可垂直起降,成本低,可在空中悬停及进行中低速飞行的飞行平台。
这种飞行平台的主要用途有:空中摄影;空中巡查输电线路;对地测绘;对地监视;实时图像传输等。
另外,这种飞行平台也应具有体积小,便于运输,便于使用维护的特点。
M22直升机的设计考虑了上述需要。
对该机要求有:垂直上升和中速飞行性能好,动升限在2000~3000米;最大飞行速度120公里/小时,直升机重量轻、尺寸小、可用一辆轻型车运输。
根据这些要求,在直升机型式选择上,采用了共轴式双旋翼方案。
这种型式直升机的特点是:悬停和中速飞行效率高;结构紧凑、尺寸小;由于没有尾桨,不存在来自尾桨的故障。
1.1桨盘载荷选取在总体参数选择中,首先要考虑的是桨盘载荷的问题。
考虑该直升机主要作业在悬停和经济巡航速度范围内,因此,桨盘载荷对这一速度范围的需用功率影响较大[1],减小桨盘载荷可以大大减小旋翼需用功率,提高直升机的气动效率。
对于共轴双旋翼直升机,由于存在上下旋翼的气动干扰,上下旋翼的诱导速度均大于单旋翼情况,而诱导干扰大小与桨盘载荷有关,因此,减小桨盘载荷对于共轴双旋翼直升机图1 2000年M22参加珠海国际343更具有重要意义。
与单旋翼带尾桨直升机不同的是,单旋翼直升机增加旋翼直径导致直升机尾梁长度增加,对于机身的尺寸和重量影响较大。
共轴双旋翼直升机的机身可以在旋翼桨盘的投影面积之内,增加旋翼直径可不影响机身的几何尺寸。
因此,共轴式直升机的尺寸和重量与旋翼直径的关系相对较弱。
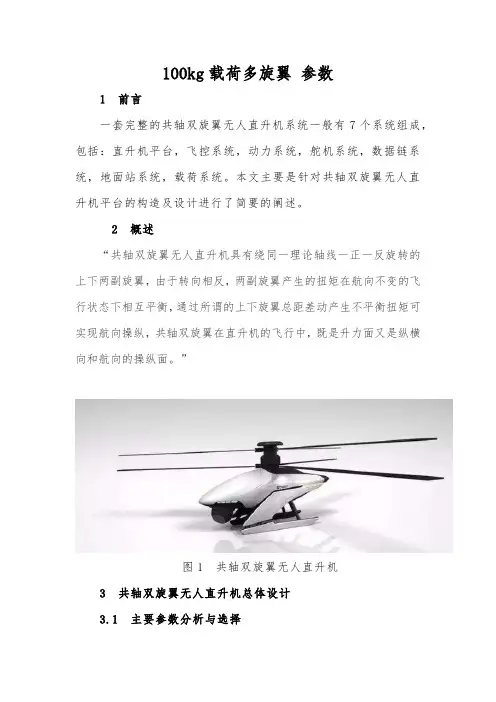
100kg载荷多旋翼参数1 前言一套完整的共轴双旋翼无人直升机系统一般有7个系统组成,包括:直升机平台,飞控系统,动力系统,舵机系统,数据链系统,地面站系统,载荷系统。
本文主要是针对共轴双旋翼无人直升机平台的构造及设计进行了简要的阐述。
2 概述“共轴双旋翼无人直升机具有绕同一理论轴线一正一反旋转的上下两副旋翼,由于转向相反,两副旋翼产生的扭矩在航向不变的飞行状态下相互平衡,通过所谓的上下旋翼总距差动产生不平衡扭矩可实现航向操纵,共轴双旋翼在直升机的飞行中,既是升力面又是纵横向和航向的操纵面。
”图1 共轴双旋翼无人直升机3 共轴双旋翼无人直升机总体设计3.1 主要参数分析与选择共轴双旋翼无人直升机平台的主要参数是总体方案的设计变量,它对直升机的性能有着决定性的影响。
因此,在直升机平台总体设计的初始阶段就要严密地进行参数选择,直升机平台总体设计参数关系到平台的飞行性能,飞行品质,气动,结构等参数。
是属于顶层设计。
对平台关键性指标起着决定性作用,同时也需要结合底层细节设计的数据相互验证,反复迭代。
直升机平台的主要参数包括,直升机总重,桨盘载荷,功率载荷,旋翼实度,和桨尖速度等。
3.1.1桨盘载荷的选择及方法桨盘载荷的定义:旋翼的拉力与旋翼桨盘面积之比。
式中,p 表示桨盘载荷,G表示直升机重量,R表示旋翼半径。
p=G/(πR²)桨盘载荷应在保证直升机平台所要求的有效载荷及性能的前提下,使直升机平台的有效载荷在总重中所占比例最大。
在具体设计时,参考与所设计直升机相近的现有直升机平台的统计数据,根据设计的具体情况来确定,一般可以遵循以下的原则:1.直升机总重量越大,桨盘载荷也应选得越大,一方面,总重较大时,往往选取更大的能获得较高的有效载荷,另一方面,对于总重较大的直升机。
如果p选得不够大,旋翼直径就会过大,在总体布置,使用等方面将引起相应问题。
2.采用涡轮轴发动机时,桨盘载荷可以选得大一些。
这样也可以获得较大的有效载荷。
探讨PC104的无人直升机飞行控制系统设计1. 引言现今无人机(UAV)的研究和发展越来越受到世界各国的重视。
其中飞行控制系统是无人直升机飞行控制的核心部分。
飞行控制系统的复杂性和实时性对所使用的嵌入式控制系统软件有很高的要求,而Linux 系统基本可以满足要求,同时由于其开源特性,正越来越多的被应用于飞控系统设计开发中,目前较为成熟的嵌入式Linux 系统多建立于ARM 系列芯片上,其具有开发时间短、可参考资料多、开发成熟度高、能耗低、体积小的优点,因此在民用嵌入式解决方案中被广泛采用。
但基于ARM 的系统由于其自身结构的限制,并不适用于高计算强度、高可靠性的应用。
所以本文提出了一种基于AMD Geode 系列处理器的PC/104模块加定制Linux 系统的控制系统方案提高该系统的可靠性。
2. 系统总体设计说明本文所研究的直升机飞行控制系统,其硬件由双工数传电台、飞控计算机、下级控制器、捷联惯导系统、发动机控制单元ECU、任务设备管理器、R/C 接收机、地面测控系统等组成。
PC/104的外部接口包括一个I/O模块和四个串口。
其中任务设备管理器通过I/O模块和机载的任务设备进行通讯,传输的信号为模拟信号和数字信号;串口分别和数传电台、捷联惯导系统、下位机控制器和发动机控制器进行通讯。
捷联惯导系统通过串口为飞控计算机提供无人直升机飞行过程中所有的飞行状态和导航信息,包括姿态角、航向角、三轴角速率、三轴线速度、线加速度、飞行位置等等。
捷联惯导系统还通过串口和下位机控制器相连接。
数传电台用于和地面测控系统进行无线链路通讯。
它接收地面测控系统的控制指令进行自主及各种模态的自动飞行以及机载工作设备的管理和控制等。
而地面测控系统通过数传电台接收机上的各种遥测信息、系统状态数据、任务工作设备的状态数据等。
下位机控制器通过串口和飞控计算机相连,接收其控制器输出信号,驱动总矩、俯仰、横滚和方向舵机的运动;在系统调试阶段利用RC遥控器共同完成无人直升机的手动模式飞行。
基于嵌入式开发的四旋翼无人机系统设计乔梦甜;冀保峰;吴文乐;范世朝;李鹏【摘要】The paper introduces a micro quadrotor uav based on STM32F106 ZET6. The main hardware circuit includes minimum system, dc motor drive, NRF24 L01 based on 2. 4 GHz, six-axis attitude acquisition and humancomputer interaction module. Various attitude of air frame is transmitted back to the ground by wireless communication module and the flight attitude of uav is controlled in real time by remote control. For software algorithm, the attitude collection array is solved by quaternion method and rotation matrix to obtain the flight attitude of the fuselage.Then, the cascade PID algorithm is adopted to minimize the system error, so as to achieve the purpose of accurate data processing and realize the stable flight of uav.%本文研究了基于STM32F106ZET6嵌入式开发板的微型四旋翼无人机, 主要硬件电路包括最小系统、直流电机驱动、基于2. 4 GHz的NRF24L01无线通信、六轴姿态传感器以及人机交互模块.依靠无线通信模块将机身的各种姿态传输回地面, 并通过遥控器实时控制无人机的飞行姿态.在软件算法上, 将姿态数组通过四元数解法和旋转矩阵, 获得机身的飞行姿态.然后通过串级PID, 将系统误差最小化, 达到准确处理数据的目的, 实现无人机的稳定飞行.【期刊名称】《山西电子技术》【年(卷),期】2019(000)002【总页数】4页(P20-23)【关键词】STM32;NRF24L01;姿态解算;串级PID;电机驱动【作者】乔梦甜;冀保峰;吴文乐;范世朝;李鹏【作者单位】河南科技大学,信息工程学院,河南洛阳 471023;河南科技大学,信息工程学院,河南洛阳 471023;电子科技大学,航空航天学院,四川成都 611731;河南科技大学,信息工程学院,河南洛阳 471023;河南科技大学,信息工程学院,河南洛阳471023;河南科技大学,信息工程学院,河南洛阳 471023【正文语种】中文【中图分类】TP18;TP273.30 前言依托方便的人机交互功能,目前无人机技术涉及的范围极广。
小型四旋翼无人机飞行控制系统设计与实现李杰;齐晓慧;韩帅涛;刘星海【摘要】为进一步深入研究和开发小型四旋翼无人机搭建飞行控制实验系统,从硬件设计、软件开发和系统调试与飞行试验3个方面对搭建的小型四旋翼无人机飞行控制系统进行较为详细地阐述.飞行试验表明:所设计的飞行控制系统初步实现了对机体姿态的有效控制,为进一步研究自主飞行奠定了基础.【期刊名称】《中国测试》【年(卷),期】2014(040)002【总页数】4页(P90-93)【关键词】小型四旋翼无人机;飞行控制系统;硬件设计;软件设计;系统调试;飞行试验【作者】李杰;齐晓慧;韩帅涛;刘星海【作者单位】军械工程学院无人机工程系,河北石家庄050003;军械工程学院无人机工程系,河北石家庄050003;军械工程学院无人机工程系,河北石家庄050003;军械工程学院无人机工程系,河北石家庄050003【正文语种】中文【中图分类】V279;V249;V217;TP2730 引言随着嵌入式处理器、传感器、导航、通信、动力与能源供给以及控制理论等技术的发展,具有广阔军事和民用前景的小型四旋翼无人机的研究与开发已经取得了很大的进展并逐步得到广泛应用[1-5]。
搭建飞行控制实验系统对深入研究与开发小型四旋翼无人机有很重要的现实意义。
通过这个平台可以展开控制算法、控制系统和导航等方面的研究,为实现小型四旋翼无人机在复杂环境中的自主飞行、编队飞行以及应用打下基础。
本文从硬件设计、软件开发、系统调试与飞行试验3个方面对搭建的飞行控制系统进行较为详细的阐述,并在系统调试的基础上进行有关飞行试验。
1 硬件设计与实现1.1 飞行控制系统硬件总体设计整个飞行控制系统硬件构成包括中心控制模块、传感器模块、四电机控制模块、遥控接收机/导航控制模块、无线通信模块和电压转换模块等部分[6]。
(1)中心控制模块即飞行控制系统的的核心处理器,是系统的核心控制部分。
负责采集传感器(包括九轴姿态传感器和高度传感器)信息并实时解算出机体姿态角和高度;根据遥控接收机信息或者导航信息,结合实时解算的机体姿态角和高度,控制电机转速;通过无线通信模块与地面站进行数据双向传输,包括上传控制指令或修改参数和下传飞行状态数据。

四旋翼无人机设计四旋翼自主飞行器是一种能够垂直起降、多旋翼式的飞行器,其通过自带电源驱动电机来提供动力。
它在总体布局上属于非共轴式碟形飞行器,与常规旋翼式飞行器相比,因其四只旋翼可相互抵消反扭力矩的优点,而不需要专门的反扭矩桨从而使其结构更为紧凑,能够产生更大的升力。
同时又因其具有灵活性高、要求的飞行空间小、能源利用率高、隐蔽性强以及安全性能高等优势,特别适合在近地面环境(如室内、城区和丛林等)中执行监视、侦查等任务,其在军事(电子战)和民用(通信、气象、灾害监测)方面都有很大的应用前景。
另外,新颖的外形、简单的结构、低廉的成本、卓越的性能及独特的飞行控制方式(通过控制四只旋翼的转速实现飞行控制)使其对广大科研人员具有很强的吸引力,成为国际上新的研究热点。
四旋翼飞行器按照四只旋翼和机架布置的方式其飞行控制平台(机架)可以分为十字模式和X模式。
X模式比十字模式灵活,但是对于姿态测量和控制的算法编程来说,十字模式较X模式简单,更容易实现。
X模式通过同时控制两对旋翼转速的大小来实现飞行控制及姿态的调整,而十字模式只要同时控制一对旋翼的转速就能实现相应的飞行动作。
十字模式容易操作,飞行平稳,综合考虑采用十字模式。
四旋翼自主飞行器是由安装在十字型刚性结构的四个电机作为驱动的飞行器。
控制器通过调节四个电机的转速使四个旋翼间出现特定的转速差从而实现飞行器的各种动作。
由于四旋翼自主飞行器是通过增大或减小四只旋翼的转速达到四个方向升力的变化进而控制飞行器的飞行姿态和位置的稳定,相对于传统的直升机少去了舵机调节平衡、控制方向,并且不用改变螺旋桨的桨距角,使得四旋翼自主飞行器更容易控制。
但是四旋翼自主飞行器有六个状态输出,即是一种六自由度的飞行器,而它却只有四个输入,是一个欠驱动系统。
也正是由于这个原因使得四旋翼自主飞行器非常适合在静态及准静态的条件下飞行。
四旋翼自主飞行器飞行控制系统由飞行控制器、各类测量传感器装置、驱动电机、被控对象(飞行器机体)等部分组成,如图1。
直升机总体课程设计一、课程目标知识目标:1. 学生能够理解直升机的基本结构、工作原理及分类。
2. 学生能够掌握直升机的主要性能指标及其影响因素。
3. 学生能够了解直升机在军事、民用领域的应用及其重要性。
技能目标:1. 学生能够通过观察、分析,识别直升机的各种部件及其功能。
2. 学生能够运用所学知识,分析直升机性能与设计参数之间的关系。
3. 学生能够运用团队合作,设计并制作一个简易的直升机模型。
情感态度价值观目标:1. 培养学生对直升机及其相关领域的兴趣,激发学生探索科学技术的热情。
2. 培养学生尊重和珍视团队合作,树立良好的团队协作意识。
3. 培养学生关注国家航空事业的发展,增强国家荣誉感。
课程性质:本课程为直升机相关知识的学习,结合理论教学与实践操作,以提高学生的理论素养和实际操作能力。
学生特点:学生处于好奇心强、动手能力逐渐提高的年级,对直升机有一定的兴趣,但相关知识体系尚不完善。
教学要求:教师应注重理论与实践相结合,关注学生的个体差异,引导学生在探究中学习,培养学生的创新精神和实践能力。
通过课程目标的分解,使学生在知识、技能和情感态度价值观方面取得具体的学习成果,为后续教学设计和评估提供依据。
二、教学内容1. 直升机概述- 直升机的定义、发展历史- 直升机的分类及特点2. 直升机基本结构- 机体结构、动力装置- 旋翼系统、尾桨系统- 起落架、飞行控制系统3. 直升机工作原理- 旋翼的空气动力学原理- 直升机的稳定性和操纵性- 直升机的主要飞行性能指标4. 直升机的应用领域- 军事应用:侦查、作战、救援等- 民用应用:交通、旅游、消防、医疗等5. 直升机设计与制作- 直升机设计原则与流程- 直升机模型制作方法与技巧- 团队合作与分工教学内容安排和进度:第一课时:直升机概述、基本结构第二课时:直升机工作原理、应用领域第三课时:直升机设计与制作(理论)第四课时:直升机设计与制作(实践)教学内容与教材关联性:本教学内容与教材中关于直升机的基础知识、工作原理和应用领域等内容密切相关,旨在帮助学生构建完整的直升机知识体系,培养学生的实践操作能力。
直升机总体设计课程设计一、课程目标知识目标:1. 了解直升机的基本结构、原理及其组成部分的功能;2. 掌握直升机总体设计的基本流程、方法和评价指标;3. 掌握直升机飞行性能、稳定性和操纵性的基本知识;4. 了解直升机设计中的限制因素和优化方法。
技能目标:1. 能够运用直升机总体设计的基本方法,进行初步的直升机设计方案制定;2. 能够分析直升机的飞行性能、稳定性和操纵性,提出改进措施;3. 能够运用相关软件工具,进行直升机总体设计的计算和分析;4. 能够撰写规范的直升机总体设计报告,并进行口头汇报。
情感态度价值观目标:1. 培养学生对直升机总体设计及相关工程问题的兴趣,激发创新意识;2. 培养学生严谨、务实、团结协作的科学态度,增强工程实践能力;3. 培养学生关注国家航空事业的发展,树立民族自豪感和社会责任感;4. 培养学生尊重知识产权,遵循职业道德,具备良好的职业素养。
课程性质:本课程为专业选修课,以直升机总体设计为主线,结合理论知识与实践操作,旨在提高学生的专业素养和工程实践能力。
学生特点:学生具备一定的航空基础知识,对直升机设计有一定兴趣,但实践经验不足。
教学要求:结合课程性质和学生特点,注重理论与实践相结合,强化设计方法与工程实践能力的培养,提高学生的综合素质。
通过课程学习,使学生能够达到上述具体的学习成果。
二、教学内容1. 直升机基本原理与结构:包括直升机分类、旋翼原理、尾桨作用、机身结构等;参考教材章节:第一章《直升机概述》2. 直升机总体设计流程与方法:介绍直升机设计的基本步骤、方法和评价指标;参考教材章节:第二章《直升机总体设计方法》3. 直升机飞行性能分析:涉及飞行速度、升限、航程、载荷等方面的知识;参考教材章节:第三章《直升机飞行性能》4. 直升机稳定性与操纵性分析:研究直升机的稳定性、操纵性及其影响因素;参考教材章节:第四章《直升机稳定性与操纵性》5. 直升机设计限制与优化:探讨设计过程中的限制因素、优化目标及方法;参考教材章节:第五章《直升机设计限制与优化》6. 直升机总体设计实践:结合实际案例,进行直升机设计方案制定、计算与分析;参考教材章节:第六章《直升机总体设计实践》7. 直升机总体设计报告撰写与口头汇报:规范报告格式,锻炼学生表达与沟通能力。