船舶原理教案2(稳性和吃水差)
- 格式:ppt
- 大小:1.02 MB
- 文档页数:89

第五章船舶吃水差第一节航行船舶对吃水差及吃水的要求吃水差的概念:1.吃水差的定义船舶吃水差是指首吃水与尾吃水的差值,用符号t表示。
当船舶首吃水大于尾吃水时,t为正值,称为首吃水差,相应纵向浮态称作首倾;当船舶首吃水小于尾吃水时,t为负值,称为尾吃水差,该纵向浮态称作尾倾;当船舶首吃水和尾吃水相同时,t为零值,相应纵向浮态称作平吃水。
2.吃水差产生的原因若装载后重心纵向位置与正浮状态的浮心纵向位置不在同一垂线上,则船舶将产生一纵倾力矩,迫使船舶纵倾。
随着船舶纵倾,水线下排水体积的形状发生变化,浮心也随之移动。
当船倾斜至某一水线时,重心与纵倾后的浮心重新在与新水线垂直的垂线上,则船舶达到平衡,此时船舶首、尾吃水不相同,从而产生吃水差。
吃水差对船舶性能的影响:船舶吃水差及吃水对操纵性、快速性、适航性与抗风浪性能都会产生一定的影响。
尾倾过大,船舶操纵性变差,航速降低,船首部底板易受波浪拍击而导致损坏,驾驶台瞭望盲区增大;首倾时使螺旋桨和舵叶的人水深度减小,航速降低,航向稳定性变差,首部甲板容易上浪,而且船舶在风浪中纵摇和垂荡时,使螺旋桨和舵叶易露出水面,造成飞车。
船舶在某些情况下空载航行,此时吃水过小,更影响螺旋桨和舵叶的入水深度,使船舶操纵性和快速性降低。
另外,因受风面积增大,也使船舶稳性变差、航速减小。
营运船舶对吃水差的要求:船舶在航行中为保证其航海性能,应使船舶适度尾倾。
船舶开航前,尾吃水差适宜值与船舶大小、装载状况、航速等因素有关。
实践经验表明,万吨级货船适度吃水差为:满载时-0.3~-0.5m ;半载时-0.6~-0.8m ;轻载时-0.9~-1.9m 。
各船具体情况不同,驾驶人员应根据本船实际状况确定适当尾吃水差值。
船舶不同装载状况下若航速一定,存在一纵倾状态使船舶航行阻力最小,因而所耗主机功率也最小,从而节省了燃料,该纵倾状态称为最佳纵倾。
空载航行船舶对吃水差及吃水的要求:船舶在空载时,为了节约能源总力图减少压载重量,但考虑到船舶过小吃水及不适当的吃水差会给船舶安全航行带来不利影响,因此应使压载后的船舶纵向浮态满足一定要求。
船舶稳性和吃水差计算船舶稳性和吃水差计算Ship stability and trim calculations1.总则General rules保证船舶稳性和强度在任何时候都保持在船级社认可的稳性计算书规定范围内,防止因受载不当,产生应力集中造成船体结构永久性变形或损伤。
Ensure stability and strength of the ship at all times to maintain stability within stability calculations approved by the classification societies in order to prevent due to load improperly resulting in stress concentration which will cause the ship structure permanent deformation or subversion.2.适用范围Sphere of application公司所属和代管船舶的稳性、强度要求To satisfy the requirement of company owned and managed ships stability and strength3.责任Responsibility3.1.大副根据本船《装载手册》或《稳性计算手册》等法定装载资料,负责合理配载或对相关部门提供的预配方案进行核算,确保船舶稳性及强度处于安全允许值范围。
Based on the ship "loading manual" or "stability calculations manual" and other legal loading information, the chief officer is responsible for making reasonable stowage plan or adjust accounts of the pre plan from relevant departments to ensure stability and strength of the ship in a safe range of allowed values.3.2.船长负责审批大副确认的配载方案和稳性计算。

课程教学大纲Course Teaching Syllabus(Chinese Version)课程编号:010308008课程名称:船舶原理适用专业:航海技术负责人:徐德云大连航运职业技术学院《船舶原理》课程教学大纲学分 2 ,学时40课程编号:010308008 适用专业: 航海技术执笔:卢显青编写日期:2009年7月一、课程的性质与任务本课程是根据STCW78/95公约的要求,为航海技术和轮机管理专业开设的一门专业基础课,旨在使学生通过该课程的学习,掌握船舶的基础知识及船体结构和各种航海性能方面的知识,特别是保持船舶适航性及抗沉性方面的知识。
二、课程教学内容、基本要求主要教学内容:(一) 船舶主要特征1.主尺度、尺度比和船型系数、船舶重量和吨位2.型线图(二) 浮性1.装卸货后的正浮吃水2.航区水密度对吃水的影响3.干舷、载重线标志、水尺(三) 稳性和吃水差1.初稳性计算2.大倾角稳性3.吃水差的计算4.稳性规范5.船舶谐摇、倾斜实验(四) 抗沉性1.抗沉能力等级2.水密完整性的基本知识3.抗沉性综合分析(五)船舶阻力和推进1.船舶阻力2.螺旋桨工作原理3.空泡现象4.调距螺旋桨(六)船体强度1.总纵强度、局部强度、扭转强度2.船体强度的一般运算3.校合船体强度基本要求:通过本课程的学习,使学生掌握船舶各种航海性能的原理和营运变化规律,能够正确使用船舶有关资料,并有一定熟练程度的计算能力,掌握船舶营运中保持和提高航海性能、确保船舶安全的技能是本课程的主要目的要求。
该课程同时为航海技术专业的《船舶货运》、《船舶操纵》、《船体结构与设备》及轮机管理专业的课程打下扎实的理论基础。
三、课程的其它教学环节本课程主要采用课堂教学。
每堂课布置作业,主要针对基本概念进行强化。
四、建议课时分配五、说明本课程是根据用船人员的实际工作需要而设置的,授课时不能只作船舶常识介绍,也不能停留在一般原理分析阶段,应避免船舶设计性能过多的分析,以解决实际问题为重点,要按照STCW78/95公约的要求,尽量突出本课程的实践和实用性。
匕科技.凰关于稳性与船舶吃水差的调整的认识熊丁(江苏海事职业技术学院,江苏南京211170)睛要]物体的运动包括平动和转动,平动涉及到力,转动涉及到力矩,要研究物体的运动当然离不开对源头的追溯,即对力和力矩的分析j要解决船舶的运动也是同样的道理。
船舶在航行中受到外力后倾斜,如何回复;当船舶要调整到某个倾斜角度,如何去做。
下面都分别做了论述。
饫锺阑】回复力偶;稳】生;吃水差;风力1保证稳性的重量分配船舶在重量上的纵向分配是保证纵向强度的经验做法,同样在垂向上分配的经验做法是所有货重的百分之三十五左右分配在二层舱,底舱分配余下的重量,当然,多层舱的船舶分配的量略有不同,按照经验,船舶重心低能保证具有足够的稳性,表面上去看,稳性仅仅和船舶的重心有直接的关系,下面我们从力和力矩的角度去理1生看待这样的问题。
11力的传动性和平行移动船舶正浮于水上,在不受外力的作用下,重力与浮力必然保持平衡,我们知道保#-T4鼾的力有这样的特点,力的大小相等方向相反并且共线。
对于刚体(即受到力的作用时,物体变形可以忽略一般被视为刚体)来说其上单独作用一力F,与作用一力F同时再加任意一对平衡力是完全等效的,按此推理得出结论:1)力F沿着其延长线移动到刚体上某处和力移动前的状态完全等效。
2)物体在A点处受力F1,把力F1平行移动到B点处,A与B间距Lo在A处我们加上一对平衡力F2和F3,F2与F1同向且相等。
那么力F1平行移动后物体的整个受力情况是,物体受到F2(F1=F2)力作用同时.#t曾/J07-F1和F3构成的力偶,力偶距大小为F1口Lo12回复力矩与倾覆力矩船舶在受到一侧风力的作用,按经验判断船舶必定顺着风向一例倾斜,但倾斜并不是因为风力,力是物体间的相互柳械作用,力本身只会让物体平动,而力矩才可以让物体转动。
在风力的作用下船舶有J顷风向一侧移动的趋势,船舶运动给水推力,根据作用力与反作用力,水必然给船舶一大,J、丰目等方向相反的力,作用点当然位于水下,而船舶露出水面的部分才会受到风压力F,F=P[]A:F:为船舶一侧受到风力:P:风压强:A:受风侧投影面积。
第五章船舶吃水差第一节航行船舶对吃水差及吃水的要求吃水差的概念:1吃水差的定义船舶吃水差是指首吃水与尾吃水的差值,用符号t表示。
当船舶首吃水大于尾吃水时,t为正值,称为首吃水差,相应纵向浮态称作首倾;当船舶首吃水小于尾吃水时,t 为负值,称为尾吃水差,该纵向浮态称作尾倾;当船舶首吃水和尾吃水相同时,t为零值,相应纵向浮态称作平吃水。
2 •吃水差产生的原因若装载后重心纵向位置与正浮状态的浮心纵向位置不在同一垂线上,则船舶将产生一纵倾力矩,迫使船舶纵倾。
随着船舶纵倾,水线下排水体积的形状发生变化,浮心也随之移动。
当船倾斜至某一水线时,重心与纵倾后的浮心重新在与新水线垂直的垂线上,则船舶达到平衡,此时船舶首、尾吃水不相同,从而产生吃水差。
吃水差对船舶性能的影响:船舶吃水差及吃水对操纵性、快速性、适航性与抗风浪性能都会产生一定的影响。
尾倾过大,船舶操纵性变差,航速降低,船首部底板易受波浪拍击而导致损坏,驾驶台瞭望盲区增大;首倾时使螺旋桨和舵叶的人水深度减小,航速降低,航向稳定性变差,首部甲板容易上浪,而且船舶在风浪中纵摇和垂荡时,使螺旋桨和舵叶易露出水面,造成飞车。
船舶在某些情况下空载航行,此时吃水过小,更影响螺旋桨和舵叶的入水深度,使船舶操纵性和快速性降低。
另外,因受风面积增大,也使船舶稳性变差、航速减小。
营运船舶对吃水差的要求:船舶在航行中为保证其航海性能,应使船舶适度尾倾。
船舶开航前,尾吃水差适宜值与船舶大小、装载状况、航速等因素有关。
实践经验表明,万吨级货船适度吃水差为:满载时-0.3〜-0.5m ;半载时-0.6〜-0.8m ;轻载时-0.9〜-1.9m。
各船具体情况不同,驾驶人员应根据本船实际状况确定适当尾吃水差值。
船舶不同装载状况下若航速一定,存在一纵倾状态使船舶航行阻力最小,因而所耗主机功率也最小,从而节省了燃料,该纵倾状态称为最佳纵倾。
空载航行船舶对吃水差及吃水的要求:船舶在空载时,为了节约能源总力图减少压载重量,但考虑到船舶过小吃水及不适当的吃水差会给船舶安全航行带来不利影响,因此应使压载后的船舶纵向浮态满足一定要求。
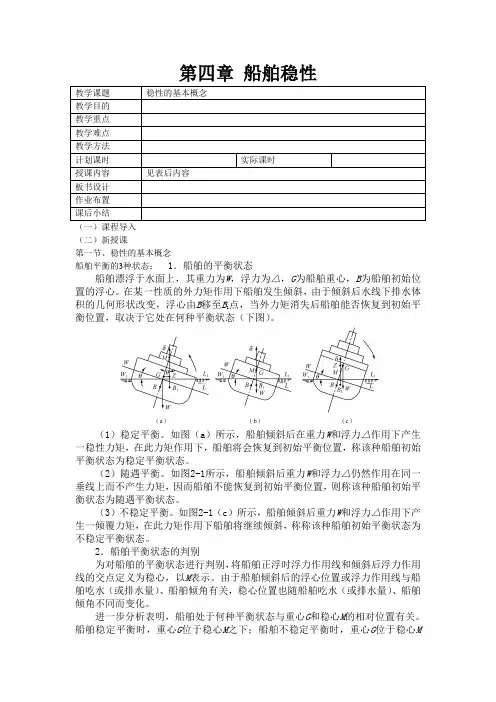
第四章船舶稳性教学课题稳性的基本概念教学目的教学重点教学难点教学方法计划课时实际课时授课内容见表后内容板书设计作业布置课后小结(一)课程导入(二)新授课第一节、稳性的基本概念船舶平衡的3种状态: 1.船舶的平衡状态船舶漂浮于水面上,其重力为W,浮力为△,G为船舶重心,B为船舶初始位置的浮心。
在某一性质的外力矩作用下船舶发生倾斜,由于倾斜后水线下排水体积的几何形状改变,浮心由B移至B1点,当外力矩消失后船舶能否恢复到初始平衡位置,取决于它处在何种平衡状态(下图)。
(1)稳定平衡。
如图(a)所示,船舶倾斜后在重力W和浮力△作用下产生一稳性力矩,在此力矩作用下,船舶将会恢复到初始平衡位置,称该种船舶初始平衡状态为稳定平衡状态。
(2)随遇平衡。
如图2-1所示,船舶倾斜后重力W和浮力△仍然作用在同一垂线上而不产生力矩,因而船舶不能恢复到初始平衡位置,则称该种船舶初始平衡状态为随遇平衡状态。
(3)不稳定平衡。
如图2-1(c)所示,船舶倾斜后重力W和浮力△作用下产生一倾覆力矩,在此力矩作用下船舶将继续倾斜,称称该种船舶初始平衡状态为不稳定平衡状态。
2.船舶平衡状态的判别为对船舶的平衡状态进行判别,将船舶正浮时浮力作用线和倾斜后浮力作用线的交点定义为稳心,以M表示。
由于船舶倾斜后的浮心位置或浮力作用线与船舶吃水(或排水量)、船舶倾角有关,稳心位置也随船舶吃水(或排水量)、船舶倾角不同而变化。
进一步分析表明,船舶处于何种平衡状态与重心G和稳心M的相对位置有关。
船舶稳定平衡时,重心G位于稳心M之下;船舶不稳定平衡时,重心G位于稳心M之上;船舶随遇平衡时,重心G 和稳心M 重合。
因此,为了使船舶在受到一外力矩作用下具有一定的复原能力从而保证船舶安全,船舶重心必须在相应倾角时的稳心之下。
处于稳定平衡状态的船舶,其复原能力的大小取决于倾斜后产生的稳性力矩或复原力矩s M 的大小。
由图(a )可见,该稳性力矩大小为s M GZ =∆⋅式中:GZ ──静稳性力臂 (m ),是船舶重心G 至倾斜后浮力作用线的垂直距离,通常简称作稳性力臂或复原力臂。
第四章船舶吃水差第一节营运船舶对吃水差及吃水的要求一、船舶吃水差及吃水对航行性能的影响二、航行船舶对吃水差的要求1. 定义:•船舶吃水差(Trim)——指首尾吃水的差值。
t=d F-d A•万吨级货船适度吃水差为:满载时一0.3 ——一0.5 m;•半载时一0.6 ——一0.8 m;轻载时一0.9 ——一1.9 m。
三、空载航行船对吃水及吃水差的要求IMO和各国都对空载吃水和吃水差有明确的要求。
主要有:一般空船压载后吃水≥50% d s,冬季压载后吃水≥55%d s;|t|<2.5%L,使纵倾角<1.5°最小平均吃水d m≥0.02L BP + 2 (m )L BP≤150 m :d Fmin≥0.025 L BP〔m〕L BP>150 m :d Fmin≥0.012L BP + 2 (m )螺旋桨沉深直径比h/D >0.8 ~0.9第二节船舶吃水差及吃水的基本核算一、吃水差产生的原因•装载后重心纵向位置与正浮状态的浮心纵向位置不在同一垂线上,则船舶产生一纵倾力矩,迫使船舶纵倾。
随着船舶纵倾,水线下排水体积的形状发生变化,浮心也随之移动。
当船舶倾至某一水线时,重心与纵倾后的浮心重新在与新水线垂直的垂线上,则船舶达到平衡,此时船舶首、尾吃水不相同,从而产生吃水差。
二、吃水差计算原理:三、吃水差及首、尾吃水的基本核算1.计算排水量和重心纵坐标△=ΣP ix g=Σp i *x i /△2 . 计算船舶首吃水d F和尾吃水d A第三节 载荷变动及舷外水密度改对纵向浮态的影响一、载荷纵移载荷P 沿纵向移动x ,从而产生纵倾力矩9.81Px kN·m ,于是载荷移动引起的 吃水差改变量δt 为(m)注意:载荷P 前移,δt 为+;载荷P 后移,δt 为一。
•载荷移动后新的首、尾吃水d F1、d A1和吃水差t 1为 :二、重量增减*1.少量增减少量增减——指载荷增减量约少于10%Δ。
注意:装载时P 取+,卸载时P 取一。
第四章船舶稳性教案(DOC)教学课题教学目的教学重点教学难点教学方法计划课时授课内容板书设计作业布置课后小结稳性的基本概念见表后内容实际课时(一)课程导入(二)新授课第一节、稳性的基本概念船舶平衡的3种状态:1.船舶的平衡状态船舶漂浮于水面上,其重力为W,浮力为△,G为船舶重心,B为船舶初始位置的浮心。
在某一性质的外力矩作用下船舶发生倾斜,由于倾斜后水线下排水体积的几何形状改变,浮心由B移至B1点,当外力矩消失后船舶能否恢复到初始平衡位置,取决于它处在何种平衡状态(下图)。
(1)稳定平衡。
如图(a)所示,船舶倾斜后在重力W和浮力△作用下产生一稳性力矩,在此力矩作用下,船舶将会恢复到初始平衡位置,称该种船舶初始平衡状态为稳定平衡状态。
(2)随遇平衡。
如图2-1所示,船舶倾斜后重力W和浮力△仍然作用在同一垂线上而不产生力矩,因而船舶不能恢复到初始平衡位置,则称该种船舶初始平衡状态为随遇平衡状态。
(3)不稳定平衡。
如图2-1(c)所示,船舶倾斜后重力W和浮力△作用下产生一倾覆力矩,在此力矩作用下船舶将继续倾斜,称称该种船舶初始平衡状态为不稳定平衡状态。
2.船舶平衡状态的判别为对船舶的平衡状态进行判别,将船舶正浮时浮力作用线和倾斜后浮力作用线的交点定义为稳心,以M表示。
由于船舶倾斜后的浮心位置或浮力作用线与船舶吃水(或排水量)、船舶倾角有关,稳心位置也随船舶吃水(或排水量)、船舶倾角不同而变化。
进一步分析表明,船舶处于何种平衡状态与重心G和稳心M的相对位置有关。
船舶稳定平衡时,重心G位于稳心M之下;船舶不稳定平衡时,重心G位于稳心M之上;船舶随遇平衡时,重心G和稳心M重合。
因此,为了使船舶在受到一外力矩作用下具有一定的复原能力从而保证船舶安全,船舶重心必须在相应倾角时的稳心之下。
处于稳定平衡状态的船舶,其复原能力的大小取决于倾斜后产生的稳性力矩或复原力矩M的大小。
由图(a)可见,该稳性力矩大小为MGZ式中:GZ──静稳性力臂(m),是船舶重心G至倾斜后浮力作用线的垂直距离,通常简称作稳性力臂或复原力臂。