2-抓手工位机器人工作流程图-参考
- 格式:docx
- 大小:192.54 KB
- 文档页数:4
综合成绩优秀()良好()中等()及格()不及格()教师(签名)批改日期2015年 6 月 26 日PLC应用综合设计报告院系电子与电气工程学院专业电气工程及其自动化课题机械手取放工件的PLC控制班级姓名2015 年06月PLC应用综合设计调试记录班级学号:姓名:调试过程与结果(概要)按下启动按钮,传送带开始运行,光电开关检测到物品时I1.1为ON,机械手开始上升到极限开关后执行左移动作;左移到限位开关后开始下降;下降到限位开关后执行抓物动作;由机械手手指上的压力继电器检测夹紧与否,夹紧后上升到上限开关后右移;压动右限行程开关,机械手开始下降;压动下限行程开关,下降结束,放下手中物品;经适当的延时后放物结束,完成一个完整的循环,并传送带继续运行,连续循环。
若按下停止开关,在循环结束时即结束动作,不在循环。
若按下复位开关,所有动作立即停止。
教师检查调试情况调试成功()调试基本成功()调试失败()现场答辩情况通过()未通过()教师签名日期课题名称:机械手去放工件的PLC控制课题分值:10分一.控制要求工业机械手的任务是搬运物品,要求它将传送带A上的物品搬至传送带B上,由于传送带A和B都按规定的方向和规律运行,故可以将物品传送至指定位置。
机械手搬运物品工件示意图如下所示,传送带A为步进传送,每当机械手从传送带A上取走一个物品时,该传送带向前步进一段距离,将下一物品传送到位,以便机械手在下一个工作循环取走物品。
机械手按照规定的动作,将传送带A上的物品搬运到传送带B上,传送带B是连续运转的。
传送带A传送带B图1 机械手搬运动作示意图机械手工作流程图如下所示,工作过程说明如下:上升左旋下降A起动抓物上升原位右旋下降放物图2 机械手工作流程图工作过程说明如下:(1)机械手在原始位置,按下启动按钮,传送带B开始运行,机械手从有下限位置开始上升。
(2)机械手上升到上限行程开关位置,压动行程开关后,上升动作结束,机械手开始左旋。


英文回答:The manual operation of an industrial robot entails several crucial steps. Initially, the operator is required to gain proficiency with the robot's control panel, epassing an array of buttons, switches, and a touchscreen interface for programming and controlling the robot. This necessitatesprehensive training and certification to ensure that the operator possesses the requisite skills and knowledge topetently and securely manipulate the robot. Subsequently, after familiarizing themselves with the control panel, the operator is able to activate the robot and conduct essential safety checks to ascertain the clearance of obstacles and other hazards withinthe work area. This process may involve utilizing the robot's sensors and cameras to visually inspect the work area and verify its suitability for the robot's operation.工业机器人的人工操作需要几个关键步骤。

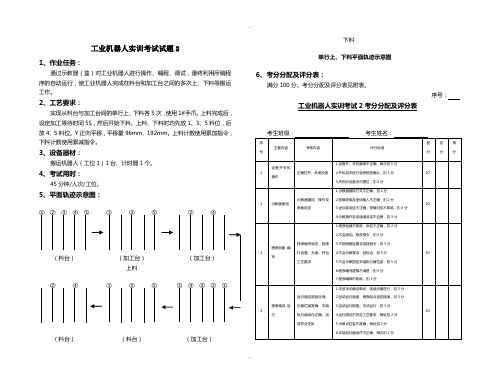
.工业机器人实训考试试题21、作业任务:通过示教器(盒)对工业机器人进行操作、编程、调试,最终利用所编程序的自动运行,使工业机器人完成在料台和加工台之间的多次上、下料等搬运工作。
2、工艺要求:实现从料台与加工台间的单行上、下料各5次,使用1#手爪。
上料完成后,设定加工等待时间5S,然后开始下料。
上料、下料时均先放1、3、5料位,后放4、5料位。
Y正向平移,平移量96mm、192mm。
上料计数使用累加指令,下料计数使用累减指令。
3、设备器材:搬运机器人(工位1)1台、计时器1个。
4、考试用时:45分钟/人次/工位。
5、平面轨迹示意图:①②③④⑤①③⑤②④(料台)(加工台)(加工台)上料②④①③⑤⑤④③②①(料台)(料台)(加工台)下料单行上、下料平面轨迹示意图6、考分分配及评分表:满分100分。
考分分配及评分表见附表。
序号:工业机器人实训考试2考分分配及评分表.7、参考程序(示例程序16):—主/子程序—P000=-2.794532,-2.354631,2.188341,0.003075,90.157050,0.001526,0.000000,0.000000;P001=-63.710039,25.299595,-7.861327,4.556348,23.249510,125.626166,0.000000,0.000000;P002=41.545406,3.321531,18.073557,45.076682,45.993369,16.956343,0.000000,0.000000;P003=-63.710039,26.567787,-24.203067,2.900811,38.293129,127.536598,0.000000,0.000000; P004=-58.026860,-16.387816,16.735965,-25.931263,54.361455,131.271836,0.000000,0.000000; P005=-7.803018,5.567475,-5.638086,43.137545,94.729901,-7.908513,0.000000,0.000000;P006=58.646248,-16.083230,24.034333,27.601415,46.612482,47.158405,0.000000,0.000000;P007=41.545406,2.731131,12.660845,41.393473,50.371408,22.474144,0.000000,0.000000; 0001 MAIN; //程序头0002 MOVJ P0 ,V20 ,Z0 ; //零点0003 SET R0 ,0 ; //给R0变量赋值为00004 SET R1 ,5 ; //给R1变量赋值为50005 SETE PX0 (0) ,0 ; //给PX0变量在各方向均赋值为00006 SETE PX1 (0) ,0 ; //给PX1变量在各方向均赋值为00007 SETE PX1 (2) ,96 ; //给PX1变量在Y方向正方向赋值为960008 SETE PX2 (0) ,0 ; //给PX2变量在各方向均赋值为00009 SETE PX3 (0) ,0 ; //给PX3变量在各方向均赋值为00010 SETE PX3 (2) ,192 ; //给PX3变量在Y方向正方向赋值为192 0011 SETE PX4 (0) ,0 ; //给PX4变量在各方向均赋值为00012 SETE PX5 (0) ,0 ; //给PX5变量在各方向均赋值为00013 SETE PX5 (2) ,384 ; //给PX5变量在Y方向正方向赋值为384 0014 SETE PX6 (0) ,0 ; //给PX6变量在各方向均赋值为00015 SETE PX6 (2) ,384 ; //给PX6变量在Y方向正方向赋值为384 0016 SETE PX7 (0) ,0 ; //给PX7变量在各方向均赋值为00017 SETE PX7 (2) ,384 ; //给PX7变量在Y方向正方向赋值为384 0018 DOUT OT9 ,OFF ; //抓取输出信号关闭0019 DOUT OT8 ,ON ; //松开输出信号打开0020 WAIT IN8 ,ON ,T0 ; //松开到位输入信号延时-无限延长0021 DELAY T0.5 ; //延时0.5S0022 LAB0: //程序段标签00023 INC R0; //R0加10024 MOVJ P4 ,V20 ,Z0 ; //过渡点0025 SHIFTON PX0; //平移打开,平移量PX00026 MOVJ P3 ,V20 ,Z0 ; //过渡点0027 MOVL P1 ,V100 ,Z0 ; //料台抓取点0028 DOUT OT8 ,OFF ; //松开输出信号关闭0029 DOUT OT9 ,ON ; //抓取输出信号打开0030 WAIT IN9 ,ON ,T0 ; //抓取到位输入信号延时-无限延时0031 DELAY T0.5 ; //延时0.5S0032 MOVL P3 ,V100 ,Z0 ; //过渡点0033 SHIFTOFF; //平移关闭0034 MOVJ P4 ,V20 ,Z0 //过渡点;0035 MOVJ P5 ,V20 ,Z0 ; //安全点、延时点、判断点0036 PX0 = PX0 + PX1 ; //PX0在Y方向正方向加96,实现向右偏移0037 JUMP LAB1 ,IF R0 <= 3 ; //如果R0值<=3时,转到LAB1,否则执行下一行指令0038 JUMP LAB2 ,IF R0 <= 5 ; //如果R0值<=5时,转到LAB2,否则执行下一行指令0039 LAB1 : //程序段标签1.0040 MOVJ P6 ,V20 ,Z0 ; //过渡点0041 SHIFTON PX2 ; //平移打开,平移量PX20042 MOVJ P7 ,V20 ,Z0 ; //过渡点0043 MOVL P2 ,V100 ,Z0 ; //加工台放置点(料位1、3、5)0044 DOUT OT9 ,OFF ; //抓取输出信号关闭0045 DOUT OT8 ,ON ; //松开输出信号打开0046 WAIT IN8 ,ON ,T0 ; //松开到我输入信号延时-无限延时0047 DELAY T0.5 ; //延时0.5S0048 MOVL P7 ,V100 ,Z0 ; //过渡点0049 SHIFTOFF; //平移关闭0050 MOVJ P6 ,V20 ,Z0 ; //过渡点0051 MOVJ P5 ,V20 ,Z0 ; //安全点、延时点、判断点0052 PX2 = PX2 + PX3 ; //PX2在Y方向正方向加192,实现向右偏移0053 JUMP LAB0 ,IF R0 < 5 ; //R0值<5时,转到LAB0,否则执行下一行指令0054 LAB2 : //程序段标签20055 PX4 = PX4 + PX1 ; //PX3在Y方向正方向加96,实现向右偏移0056 MOVJ P6 ,V20 ,Z0 ; //过渡点0057 SHIFTON PX4 ; //平移打开0058 MOVJ P7 ,V20 ,Z0 ; //过渡点0059 MOVL P2 ,V100 ,Z0 ; //加工台放置点(料位2、4)0060 DOUT OT9 ,OFF ; //抓取输出信号关闭0061 DOUT OT8 ,ON ; //松开输出信号打开0062 WAIT IN8 ,ON ,T0; //松开到位输入信号延时-无限延时0063 DELAY T0.5 ; //延时0.5S0064 MOVL P7 ,V100 ,Z0 //过渡点0065 SHIFTOFF; //平移关闭0066 MOVJ P6 ,V20 ,Z0 ; //过渡点0067 MOVJ P5 ,V20 ,Z0 ; //安全点、延时点、判断点0068 PX4 = PX4 + PX1 ; //PX3在Y方向正方向加96,实现向右偏移0069 JUMP LAB0 ,IF R0 < 5 ; //R0值<5时,转到LAB0,否则执行下一行指令0070 DELAY T5 ; //延时5S(等待加工完成)0071 LAB3 : //程序段标签30072 DEC R1 ; //R1减10073 MOVJ P6 ,V20 ,Z0 ; //过渡点0074 SHIFTON PX5 ; //平移打开,平移量PX50075 MOVJ P7 ,V20 ,Z0 ; //过渡点0076 MOVL P2 ,V100 ,Z0 ; //加工台抓取点0077 DOUT OT8 ,OFF ; //松开输出信号关闭0078 DOUT OT9 ,ON ; //抓取输出信号打开0079 WAIT IN9 ,ON ,T0 //抓取到位输入信号延时-无限延时0080 DELAY T0.5 ; //延时0.5S0081 MOVL P7 ,V100 ,Z0 ; //过渡点0082 SHIFTOFF; //平移关闭0083 MOVJ P6 ,V20 ,Z0 ; //过渡点0084 MOVJ P5 ,V20 ,Z0 ; //安全点、延时点、判断点0085 PX5 = PX5 - PX1 ; //PX5在Y方向正方向减96,否则执行下一行指令0086 JUMP LAB4 ,IF R1 >= 2 ; //如果R0值>=2时,转到LAB4,否则执行下一行指令0087 JUMP LAB5 ,IF R1 >= 0 ; //如果R0值>=0时,转到LAB5,否则执行下一行指令0088 LAB4 : //程序段标签40089 MOVJ P4 ,V20 ,Z0 ; //过渡点0090 SHIFTON PX6 ; //平移打开,平移量PX60091 MOVJ P3 ,V20 ,Z0 ; //过渡点0092 MOVL P1 ,V100 ,Z0 ; //料台放置点(料位1、3、5)0093 DOUT OT9 ,OFF ; //抓取输出信号关闭0094 DOUT OT8 ,ON ; //松开输出信号打开0095 WAIT IN8 ,ON ,T0 ; //松开到位输入信号延时-无限延时0096 DELAY T0.5 ; //延时0.5S0097 MOVL P3 ,V100 ,Z0 ; //过渡点0098 SHIFTOFF; //平移关闭0099 MOVJ P4 ,V20 ,Z0 ; //过渡点0100 MOVJ P5 ,V20 ,Z0 ; //安全点、延时点、判断点0101 PX6 = PX6 - PX3 ; //PX6在Y方向正方向减192,实现向左偏移0102 JUMP LAB3 ,IF R1 > 0 ; //P1值>0时,转到LAB3,否则执行下一行指令0103 LAB5 : //程序段标签5.0104 PX7 = PX7 - PX1 ; //PX7在Y方向正方向减96,实现向左偏移0105 MOVJ P4 ,V20 ,Z0 ; //过渡点0106 SHIFTON PX8 ; //平移打开,平移量PX70107 MOVJ P3 ,V20 ,Z0 ; //过渡点0108 MOVL P1 ,V100 ,Z0 ; //料台放置点(料位2、4)0109 DOUT OT9 ,OFF ; //抓取输出信号关闭0110 DOUT OT8 ,ON ; //松开输出信号打开0111 WAIT IN8 ,ON ,T0 ; //松开到位输入信号延时-无限延时0112 DELAY T0.5 ; //延时0.5S0113 MOVL P3 ,V100 ,Z0 ; //过渡点0114 SHIFTOFF; //平移关闭0115 MOVJ P4 ,V20 ,Z0 ; //过渡点0116 MOVJ P5 ,V20 ,Z0 ; //安全点、延时点、判断点0117 PX7 = PX7 - PX1 ; //PX7在Y方向正方向减96,实现向左偏移0118 JUMP LAB3 ,IF R1 > 0; //R1值>0时,否则执行下一行指令0119 MOVJ P0 ,V20 ,Z0 ; //回零0120 # RET; //返回调用此程序的主程序0121 END; //程序结束0122 MOVJ P0 ,V20 ,Z0 ; //记录点位,便于重新获取示教点0123 MOVJ P1 ,V20 ,Z0 ; //记录点位,便于重新获取示教点0124 MOVJ P2 ,V20 ,Z0 ; //记录点位,便于重新获取示教点0125 MOVJ P3 ,V20 ,Z0 ; //记录点位,便于重新获取示教点0126 MOVJ P4 ,V20 ,Z0 ; //记录点位,便于重新获取示教点0127 MOVJ P5 ,V20 ,Z0 ; //记录点位,便于重新获取示教点0128 MOVJ P6 ,V20 ,Z0 ; //记录点位,便于重新获取示教点0129 MOVJ P7 ,V20 ,Z0 ; //记录点位,便于重新获取示教点0130 END; //程序结束①②③④⑤①③⑤②④(料台)(加工台)(加工台)上料②④①③⑤⑤④③②①(料台)(料台)(加工台)下料单行上、下料平面轨迹示意图。

第三章手动操纵工业机器人3.1 机器人运动轴与坐标系3.1.1 机器人运动轴的名称3.1.2 机器人坐标系的种类3.2 认识和使用示教器学习目标导入案例课堂认知扩展与提高本章小结思考练习3.3 机器人安全操作规程3.3.1 示教和手动机器人时3.3.2 再现和生产运行时3.4 手动移动机器人3.4.1 移动方式3.4.2 典型坐标系下的手动操作课前回顾工业机器人主要由哪几部分组成?如何判别工业机器人的点位运动和连续路径运动?学习目标认知目标*了解工业机器人的安全操作规程*熟悉示教器的按键及使用功能*掌握机器人运动轴与坐标系*掌握手动移动机器人的流程和方法能力目标*能够熟练进行机器人坐标系和运动轴的选择*能够使用示教器熟练操作机器人实现点动和连续移动导入案例Universal Robots 公司推出革命性的新型工业机器人UR5 机器人自重很轻(仅 18.4 kg ),可以方便地在生产场地移动,而且不需要繁琐的安装与设置就可以迅速地融入到生产线中,与员工交互合作。
编程过程可通过教学编程模式实现,用户可以扶住 UR 机械臂,手动引导机械臂,按所需的路径及移动模式运行机械臂一次,UR 机器人就能自动记住移动路径和模式。
机器人通过一套独特的、友好的图形用户界面操作,在触摸屏幕上,有一系列范围广泛的功能让用户选择。
任何重复性的生产过程,都能够使用它并从中受益。
课堂认知3.1 机器人运动轴与坐标系3.1.1 机器人运动轴的名称通常机器人运动轴按其功能可划分为机器人轴、基座轴和工装轴,基座轴和工装轴统称外部轴。
机器人系统中个运动轴的定义典型机器人操作机各运动轴A1 、 A2 和 A3 三轴(轴 1 、轴 2 和轴 3 )称为基本轴或主轴,用以保证末端执行器达到工作空间的任意位置。
A4 、 A5 和 A6 三轴(轴 4 、轴 5 和轴 6 )称为腕部轴或次轴,用以实现末端执行器的任意空间姿态。
3.1.2 机器人坐标系的种类目前,大部分商用工业机器人系统中,均可使用关节坐标系、直角坐标系、工具坐标系和用户坐标系,而工具坐标系和用户坐标系同属于直角坐标系范畴。
页数页数带 IEC 标识结构的项目模板校对.原始项目IEC_tpl001EPLANADMINISTRATOR +日期日期替换人1修改076审核替换893142013-1-21EPLAN Software & ServiceGmbH & Co. KG12=姓名5DB99.DBX0.0DB99.DBX2.0上升确认步上升确认执行步DB99.DBX0.1DB99.DBX2.1后退确认步后退确认执行步上检测到+下没检测到+上电磁阀ONDB99.DBX2.2水平缸前进执行步DB99.DBX0.2水平缸前进步上检测到+下没检测到+水平后检测到+水平前没检测到+水平后退阀ON+自动开始DB99.DBX2.3上下缸下降执行步DB99.DBX0.3上下缸下降步上检测到+下没检测到+水平前检测到+水平后没检测到DB99.DBX2.4真空开启执行步DB99.DBX0.4真空开启并延时步上没检测到+下检测到+水平前检测到+水平后没检测到T60上没检测到+下检测到+水平前检测到+水平后没检测到+真空OK+T60DB99.DBX0.5上下上升执行步DB99.DBX2.5上下上升步DB99.DBX2.6DB99.DBX0.6水平后退步水平后退执行步上检测到+下没检测到+水平前检测到+水平后没检测到+真空OK上下二次下降步上下二次下降执行步上检测到+下没检测到+水平前没检测到+水平后检测到+真空OKDB99.DBX0.7DB99.DBX2.7真空关闭并延时步DB99.DBX1.0DB99.DBX3.0上没检测到+下检测到+水平前没检测到+水平后检测到真空关闭并延时执行步T61DB99.DBX1.1DB99.DBX3.1上下二次上升执行步上没检测到+下检测到+水平前没检测到+水平后检测到+真空NG+T61上检测到+下没检测到+水平前没检测到+水平后检测到+I66.7(有物料来)上下二次上升步。
机器人机床上下料应用案例随着装备制造技术的发展,特别在机床加工行业,技术飞速进步,人力成本和自动化程度的提高。
为了最大限度的解放劳动力,提高生产效率和产品质量,使用搬运机器人代替人工,实现高效、高品质、柔性的完成机器人对机床的上下料。
自动化要求设计1、采用一台机器人、多个工位、配置机器人辅助夹具外加上下料装置以满足客户自动化的生产要求。
2、工作站相对独立,并通过生产线匹配的电、气、水路接口联系多个工作站进行生产。
3、工作站系统简洁实用,便于操作,易于维护,具有安全防护功能。
4、设计为标准爪式夹具,刚性定位强,装卸件方便。
5、机器人外围关键设备采用航插连接,安装、运输、维护都方便。
6、搬运前后合格件、废件在工作站内部不做检验,保证搬运品质的稳定性、加快生产效率,提高产量。
7、具体的工艺和工件规格参考本文以下内容。
概要本系统的概要:作业者把工件放置到料仓料道上,到位后,机器人从滚道上抓取工件放到第一台车床上加工,完后取下再放到第二台车床上加工,然后再放回料仓料道指定工位上。
工件规格名称外径(mm) 内径(mm) 厚度(mm) 质量(kg) 图号工件1 齿轮165 35 34 2.15 CW6163C-02-049工件2 结合子齿轮123 75 72.5 1.47 CW6163C-02-018系统图(本图是大致示意图。
和详细图纸有不一样的地方。
)连续运行模式序号作业工序作业内容备注1 作业准备①工件准备、到位人工作业图1 MC20-01 机器人工作空间MC20-01动作参数:项目规格最大动作范围J1 ±180oJ2 +60o~-145 o J3 +242 o~-163 o J4 ±180oJ5 ±139oJ6 ±360o最大速度J1 170 o /s J2 170 o /s J3 360 o /s J4 360 o /s J5 360o /s J6 600o /s手腕扭矩J4 49 N·M J5 49 N·M J6 23.5 N·M手腕惯性力矩J4 1.6kg·m 2 J5 1.6kg·m 2 J6 0.8kg·m 2位置重复精度±0.06mm本体重量220kg耐环境性端部相当于IP65(手臂端部采用一般油漆)安装方式地面/吊装详细技术参数请参见技术图示机器人控制系统:控制系统支持多种标准工业控制总线,包括:Interbus、Profibus、Devicenet、Canbus、Controlnet、EtherNet、 Remote I/O等(此项目通讯方式是I/O方式);标准的ISA、PCI插槽,方便扩展;可直接插入各种标准Modem接入高速Internet,实现远程监控和诊断等。
UR50工位机器人工作流程图
UR50-R4选择抓取料框1/11# 程序:1100/1200/2100/2200# (通过PLC 预判UR40车型)
UR50-R4到指定料框抓件
程序:101#-409#
通过PLC 发来的检测件信号
UR50-R4抓件到对中台对中
程序:99#与199# 容易出现放件不到位报警
UR50-R4涂胶后到对中台放件
程序:505#与506#
UR50-R4抓件进行涂胶 程序:100#与200#
R4与R3干涉区 DI8
R4与R3干涉区 DI8
R4与R3干涉区 DI8
UR50-R3执行抓件程序 程序:101#与201#
(通过PLC 预判UR40车型)
UR50-R3执行放件程序 程序:102#与202#
(通过PLC 预判UR40车型)
工作完成信号:DO14与DO11 工作许可信号DI 11。
此时机器人已将抓手放在车身上,并与换枪盘脱开,退出与R1 R2的干涉区
DI 12:允许放件 DO16:放抓手完成
DI 16:等待夹爪将抓手夹紧 DO12:机器人放抓手完成
UR50-R3退出干涉区,R1、R2机器人进行第1次焊接
UR50-R1机器人焊接程序
程序:1#/11#
DI 11:一次焊接许可 DO11:一次焊接完成
R3与R2干涉区 DI6
DI 13/DI 17:允许机器人进入拿抓手 DO15:换枪盘锁紧,允许夹爪打开 DI 15:等待夹爪打开,抓手取走
DO13:本工位作业完成 DO20:GP 显示作业完成
UR50-R3抓手取走,R1、R2机器人进行第2/3次焊接(C51E 第二次焊接,C32B 第三次焊接)
UR50-R1机器人焊接程序
程序:1#/11#
DI 11:一次焊接许可 DO11:一次焊接完成
R3与R1干涉区 DI9
C32B 车型在R3取抓手的过程中会有第二次焊接
C32B 车型在R3取抓手的过程中会有第二次焊接
DI 12:二次焊接许可 DO12:二次焊接完成 UR50-R1机器人工作完成 C51E :DO12 C32B :DO13
DI 12:二次焊接许可 DO12:二次焊接完成
UR50-R2机器人工作完成 C51E :DO12 C32B :DO13
UR50-R4
UR50-R3
UR50-R1
UR50-R2
UR50-R3执行切换抓手程序 程序:105/106#与205/206# (通过PLC 预判UR40车型)
此工位R5与R6机器人在焊接时存在干涉区,出现焊接炸点时一定要谨慎处理,看好干涉区。
MB20-R1
MB20-1执行切换抓手程序 程序:105/106#与205/206# (通过PLC 预判MB10车型)
MB20-1执行抓件程序
程序:101#与201#
切换51抓手时与R6机器人存在干涉区DI6; 切换32抓手与R5干涉区DI7
DI 11:抓件许可信号 DO 122:与夹具干涉信号 DO 11:抓件完成信号
MB20-1机器人抓件时与R5机器人存在干涉区DI 7
DI 12:允许机器人进入放抓手 DO 121:线体干涉信号 DO 16:机器人到位允许抓手被夹紧 DI 16:允许机器人与换枪盘脱开DO 12:放件完成(机器人与抓手脱开状态)
MB20-1与抓手脱开,退出干涉区,R5、R6机器人进行焊接
DI 13:允许机器人进入拿抓手 DO 17:机器人与换枪盘锁紧完成 DI 17:允许机器人将抓手取走DO 13:工作完成信号
DO 20:工作完成(GP 显示)
MB20-R5机器人焊接程序
程序:1#/11#
DI 11:焊接许可 DO11:焊接完成
R1与R5干涉区 DI7
MB20-R5
R1与R5干涉区 DI7
R1与R5干涉区 DI7
MB20-R6
MB50-R6机器人焊接程序
程序:1#/11#
DI 11:焊接许可 DO11:焊接完成
R1与R6干涉区 DI6
R1与R6干涉区 DI6
此工位R7与R8机器人在焊接时存在干涉区,出现焊接炸点时一定要谨慎处理,看好干涉区。
MB20-2执行切换抓手程序 程序:105/106#与205/206# (通过PLC 预判MB10车型)
MB20-2执行抓件程序
程序:101#与201#
切换51抓手时与R8机器人存在干涉区DI6; 切换32抓手与R7干涉区DI7
DI 11:抓件许可信号 DO122:与夹具干涉信号 DO11:抓件完成信号
MB20-2机器人抓件时与R5机器人存在干涉区DI 7
DI 12:允许机器人进入放抓手 DO 121:线体干涉信号
DO16:机器人到位允许抓手被夹紧 DI 16:允许机器人与换枪盘脱开DO 12:放件完成(机器人与抓手脱开状态)
MB20-R2
MB20-2与抓手脱开,退出干涉区,R7、R8机器人进行焊接
DI 13:允许机器人进入拿抓手 DO17:机器人与换枪盘锁紧完成 DI 17:允许机器人将抓手取走DO 13:工作完成信号
DO 20:工作完成(GP 显示)
MB20-R7机器人焊接程序
程序:1#/11#
DI 11:焊接许可 DO11次焊接完成
R2与R7干涉区 DI7
MB20-R7
R2与R7干涉区 DI7
R2与R7干涉区 DI7
MB20-R8
MB20-R8机器人焊接程序
程序:1#/11#
DI 11:焊接许可 DO11:焊接完成
R2与R8干涉区 DI6
R2与R8干涉区 DI6
MB70工位机器人工作流程图
MB70-1执行抓件程序 程序:1#与11#
DI 11:抓件许可信号
DO 121:与EMS 干涉信号 DO15:从EMS 抓件完成信号 DO 128:EMS 卸货完成信号 DO 11:抓件完成信号
DI 12:放件许可信号(对中台) DO 122:与对中台干涉信号 DO13:对中台夹紧信号 DI13:对中台夹紧完成 DO 12:放件完成
DO 20:工作完成(GP )
MB70-R1
R1与R2干涉区 DI6
MB70-2执行切换抓手程序 程序:105/106/108#与205/206/208# (通过PLC 预判MB60车型)
MB20-2执行抓放件程序 程序:101#与201#
DI 11:抓件许可信号 DO122:与夹具干涉信号 DO15:请求打开对中台夹具 DI 15:对中台夹具打开许可 DO11:对中台抓件完成
MB70-2机器人对中台抓件完成,机器人在Home 位等待
MB70-R2
切换抓手时本工位其他点焊机器人必须在Home 位
DI 12:放件许可信号 DO121:与线体干涉信号 DO16:请求将抓手夹紧 DI 16:抓手被夹紧完成信号 DO12:放抓手完成信号
DI 13:拿走抓手许可信号 DO17:请求将抓手锁紧打开 DI 17:锁紧抓手打开信号 DO13:抓手取走工作完成 DO 20:工作完成(GP )
MB70-2机器人保持不动,其他机器人进行一次焊接
R2与其他机器人干涉区 DI8
R2与其他机器人干涉区 DI8
R3/R4/R5/R6
R3/R4/R5/R6机器人焊接程序
程序:1#/11#
DI 11:一次焊接许可 DO11:一次焊接完成
DI 12:二次焊接许可 DO12:二次焊接完成。